一种自适应气动三指柔性夹爪
本技术属于夹持器,尤其涉及一种自适应气动三指柔性夹爪。
背景技术:
1、传统夹持器与被夹持对象之间通常是刚性连接,由于部分夹持物品的特殊性、娇嫩性,这种夹持关系容易造成被夹持对象表面的损伤,甚至难以完成抓取任务;而为了完成各类复杂的搬运、调整等诸多动作,适当改变夹持器的柔性,可以有效避免夹取物品时的表面损伤。
2、根据公开号:cn201721003149.0。名称:一种气动三指构型柔性夹爪,该方案主要解决的是:夹爪本身不需要使用复杂控制算法,通过硅橡胶本身的柔性即可以实现对不同形状、尺寸物体的被动自适应抓握;但是在实现的过程中,仍存在一定的问题。
3、例如,其虽然能够利用夹爪自身柔性对物体进行有效夹持,但是其在对不同形状且不同尺寸的物体进行夹持时,若产品的规格过大或过小,使用者需手动调节夹爪的位置,来实现对不同规格的物体进行夹取的功能,此调节方式在生产时不仅耗时费力,还会降低产品生产效率;
4、为此,本产品采用气动驱动方式,基于章鱼触手结构特征提出一种自适应气动三指柔性夹爪,夹爪在一定的气压下实现抓持和放松两种状态,并且在对不同规格的物品进行抓取生产的过程中,在不停机的状态下,对不同规格的物品进行夹取。
技术实现思路
1、本实用新型目的在于提供一种自适应气动三指柔性夹爪,以解决背景技术中所提出现存夹爪虽然能够利用夹爪自身柔性对物体进行有效夹持,但是其在对不同形状且不同尺寸的物体进行夹持时,若产品的规格过大或过小,使用者需手动调节夹爪的位置,来实现对不同规格的物体进行夹取的功能,此调节方式在生产时不仅耗时费力,还会降低产品生产效率的技术问题。
2、为实现上述目的,本实用新型的具体技术方案如下:一种自适应气动三指柔性夹爪,包括柔性夹爪,该柔性夹爪为多个且呈一百二十度对称设置,而柔性夹爪的端部设置有用于对其进行装配的装配平台,同时装配平台上设有能够根据物品规格调节柔性夹爪位置的调节式收放结构,而调节式收放结构与柔性夹爪之间通过滑配件实现固定相连。
3、优选的,所述柔性夹爪的后端则设置有机械臂,同时机械臂的输出端则安装有装配构件,并且,处于柔性夹爪的进气端处连通设置有充气管,而充气管的另一端则与安装在装配构件表面的调配气管相互连接,其中,调配气管的进气端连通有泵接管。
4、优选的,所述装配平台表面的侧边位置开设有侧边槽体,而装配平台端部的两端则开设有顶边槽体,而滑配件活动装配于装配平台的表面,滑配件的两端呈对称设置有连接板体,所述滑配件的两端且位于连接板体的一侧设置有装配板体,而装配板体的表面一体成型设置有滑块。
5、优选的,所述调节式收放结构为第一收放调配组件,其中第一收放调配组件包括对滑配件进行充气推送的连气管件和伸缩气管,而连气管件安装于装配构件的底部,其中连气管件的进气端连通有分气管件,而伸缩气管的表面连通有固定管。
6、优选的,所述第一收放调配组件还包括开设于装配平台端部的中通槽,而位于装配平台的表面且位于滑配件的内腔两端对称开设有限接槽体。
7、优选的,所述第一收放调配组件包括设置于滑配件内腔的中轴体,而中轴体的表面设置有拨片,而拨片内表面的一端连接有滑环,同时拨片的内腔横向设置有弹性件,所述拨片表面的两端对称连接有限位凸杆,所述限位凸杆的表面轴端处做倒圆角设计。
8、优选的,所述调节式收放结构为第二收放调配组件,所述第二收放调配组件包括用于改变柔性夹爪位置的伸缩件和进行充气的导气管体,其中,导气管体的进气端连通有送气管体,而送气管体的输出端则连通有充气管体。优选的,所述第二收放调配组件还包括开设于装配平台端部和底部的滑配槽体和底槽,而滑配槽体和底槽内腔相互连通,并且在处于装配平台底部的一侧开设有底槽。
9、优选的,所述伸缩件的一端对称活动设置有滑板件,所述伸缩件的另一端则通过连杆活动连接有连固板。
10、优选的,所述伸缩件且位于连固板的位置处设置有拉绳件,而拉绳件的一端则连接有连接杆体,而连接杆体则活动安装于伸缩件的一端,同时,处于装配平台的中心底部通过固定杆连接有安装罩,而安装罩的内腔设置有充气球。
11、本实用新型的一种自适应气动三指柔性夹爪具有以下优点:
12、该一种自适应气动三指柔性夹爪,通过气泵对泵接管内通入气体,最终向柔性夹爪内注入气体,改变柔性夹爪的形态,而柔性夹爪本身不需要使用复杂控制算法,依然能够利用自身柔性在不伤害物品表层的同时,对不同形状的物品进行有效夹持;
13、而对不同规格的物品进行夹持时,在不停机的状态下,通过调节式收放结构能够改变滑配件的位置,以此对多个柔性夹爪相对的位置进行改变,使其能够根据不同物品的规格,来调节相邻柔性夹爪的距离,以此在不停机的状态下,对物品进行有效夹持限位,并且,调节式收放结构采用气动驱动的方式,只需从泵接管对柔性夹爪进行注气的过程中,分流部分气体即可对调节式收放结构进行驱动。
技术特征:
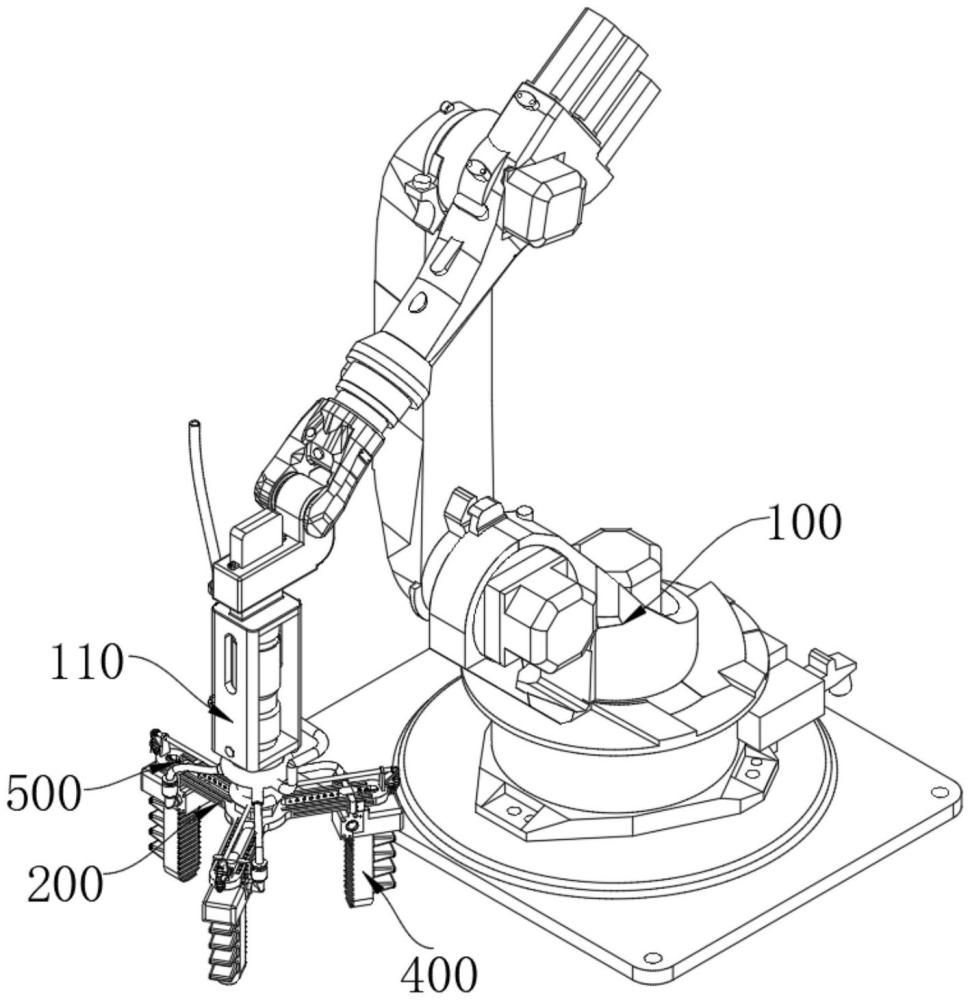
1.一种自适应气动三指柔性夹爪,其特征在于:包括柔性夹爪(400),该柔性夹爪(400)为多个且呈一百二十度对称设置,而柔性夹爪(400)的端部设置有用于对其进行装配的装配平台(200),同时装配平台(200)上设有能够根据物品规格调节柔性夹爪(400)位置的调节式收放结构,而调节式收放结构与柔性夹爪(400)之间通过滑配件(300)实现固定相连。
2.根据权利要求1所述的自适应气动三指柔性夹爪,其特征在于:所述柔性夹爪(400)的后端则设置有机械臂(100),同时机械臂(100)的输出端则安装有装配构件(110),并且,处于柔性夹爪(400)的进气端处连通设置有充气管(402),而充气管(402)的另一端则与安装在装配构件(110)表面的调配气管(401)相互连接,其中,调配气管(401)的进气端连通有泵接管(403)。
3.根据权利要求2所述的自适应气动三指柔性夹爪,其特征在于:所述装配平台(200)表面的侧边位置开设有侧边槽体(201),而装配平台(200)端部的两端则开设有顶边槽体(202),而滑配件(300)活动装配于装配平台(200)的表面,滑配件(300)的两端呈对称设置有连接板体(301),所述滑配件(300)的两端且位于连接板体(301)的一侧设置有装配板体(302),而装配板体(302)的表面一体成型设置有滑块(303)。
4.根据权利要求1所述的自适应气动三指柔性夹爪,其特征在于:所述调节式收放结构为第一收放调配组件(500),其中第一收放调配组件(500)包括对滑配件(300)进行充气推送的连气管件(510)和伸缩气管(520),而连气管件(510)安装于装配构件(110)的底部,其中连气管件(510)的进气端连通有分气管件(511),而伸缩气管(520)的表面连通有固定管(521)。
5.根据权利要求4所述的自适应气动三指柔性夹爪,其特征在于:所述第一收放调配组件(500)还包括开设于装配平台(200)端部的中通槽(530),而位于装配平台(200)的表面且位于滑配件(300)的内腔两端对称开设有限接槽体(531)。
6.根据权利要求5所述的自适应气动三指柔性夹爪,其特征在于:所述第一收放调配组件(500)包括设置于滑配件(300)内腔的中轴体(540),而中轴体(540)的表面设置有拨片(550),而拨片(550)内表面的一端连接有滑环(552),同时拨片(550)的内腔横向设置有弹性件(551),所述拨片(550)表面的两端对称连接有限位凸杆(560),所述限位凸杆(560)的表面轴端处做倒圆角设计。
7.根据权利要求1所述的自适应气动三指柔性夹爪,其特征在于:所述调节式收放结构为第二收放调配组件(600),所述第二收放调配组件(600)包括用于改变柔性夹爪(400)位置的伸缩件(630)和进行充气的导气管体(610),其中,导气管体(610)的进气端连通有送气管体(611),而送气管体(611)的输出端则连通有充气管体(612)。
8.根据权利要求7所述的自适应气动三指柔性夹爪,其特征在于:所述第二收放调配组件(600)还包括开设于装配平台(200)端部和底部的滑配槽体(620)和底槽(621),而滑配槽体(620)和底槽(621)内腔相互连通,并且在处于装配平台(200)底部的一侧开设有底槽(621)。
9.根据权利要求8所述的自适应气动三指柔性夹爪,其特征在于:所述伸缩件(630)的一端对称活动设置有滑板件(631),所述伸缩件(630)的另一端则通过连杆活动连接有连固板(632)。
10.根据权利要求9所述的自适应气动三指柔性夹爪,其特征在于:所述伸缩件(630)且位于连固板(632)的位置处设置有拉绳件(640),而拉绳件(640)的一端则连接有连接杆体(641),而连接杆体(641)则活动安装于伸缩件(630)的一端,同时,处于装配平台(200)的中心底部通过固定杆连接有安装罩(650),而安装罩(650)的内腔设置有充气球(660)。
技术总结
本技术公开了一种自适应气动三指柔性夹爪,涉及夹持器技术领域。该自适应气动三指柔性夹爪,包括柔性夹爪,该柔性夹爪为多个且呈一百二十度对称设置,而柔性夹爪的端部设置有用于对其进行装配的装配平台,同时装配平台上设有能够根据物品规格调节柔性夹爪位置的调节式收放结构。对不同规格的物品进行夹持时,在不停机的状态下,通过调节式收放结构能够改变滑配件的位置,对多个柔性夹爪相对的位置进行改变,使其能够根据不同物品的规格,调节相邻柔性夹爪的距离,以此在不停机的状态下对物品进行有效夹持,而调节式收放结构采用气动驱动的方式,只需从泵接管对柔性夹爪进行注气的过程中,分流部分气体即可对调节式收放结构进行驱动。
技术研发人员:郭玥,刘爽,何馨馨,张彦华,孙凯文,刘雨涵,林资忻,张忠来,黄敬一,焦少琦,群培多吉
受保护的技术使用者:西安石油大学
技术研发日:20231215
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!