一种危化品监测机器人的制作方法
本技术涉及危化品监测领域,尤其是涉及一种危化品监测机器人。
背景技术:
1、危化品即危险化学品,是指具有易燃、易爆、有毒、有害和放射性等特性,在运输装卸和储存保管过程中易造成人员伤亡和财产损毁而需要特别保护的化学物品,所以就需要监测取样,在取样过程中,尽量减少人员参与,通过机器人进行操作提高安全性。
2、中国实用新型(公告号:cn116690550a)公开的一种机械臂及取样机器人,包括支撑臂、活动连接在支撑臂上端的活动臂、固定安装在活动臂远离支撑臂一端的夹爪,支撑臂和活动臂连接端的内部活动设置有辅助定位组件,支撑臂的内部远离辅助定位组件的一端设置有第一调节装置,第一调节装置的输出端和辅助定位组件活动连接,活动臂的内部远离辅助定位组件的一端设置有第二调节装置,第一调节装置的输出端和辅助定位组件活动连接;本发明通过在支撑臂和活动臂上设置辅助定位组件、第一调节装置和第二调节装置,来对活动臂进行调节和支撑,解决了现有齿轮传动的方式存在的机械磨损大、活动局限性大的问题,便于提高活动臂的载重。
3、在实现本实用新型过程中,发明人发现该技术中至少存在如下问题,现有技术中通过多组支撑臂的转动和调节对物品进行夹取,但是这种仅仅在固定位置进行使用,使用过程较为呆板,适用性较差,不能进行移动式取样,尤其针对在工厂、车间等环境较为复杂的区域,因此,现在提出一种危化品监测机器人。
技术实现思路
1、为了改善进行移动式取样的问题,本实用新型提供一种危化品监测机器人。
2、本实用新型提供一种危化品监测机器人,采用如下的技术方案:
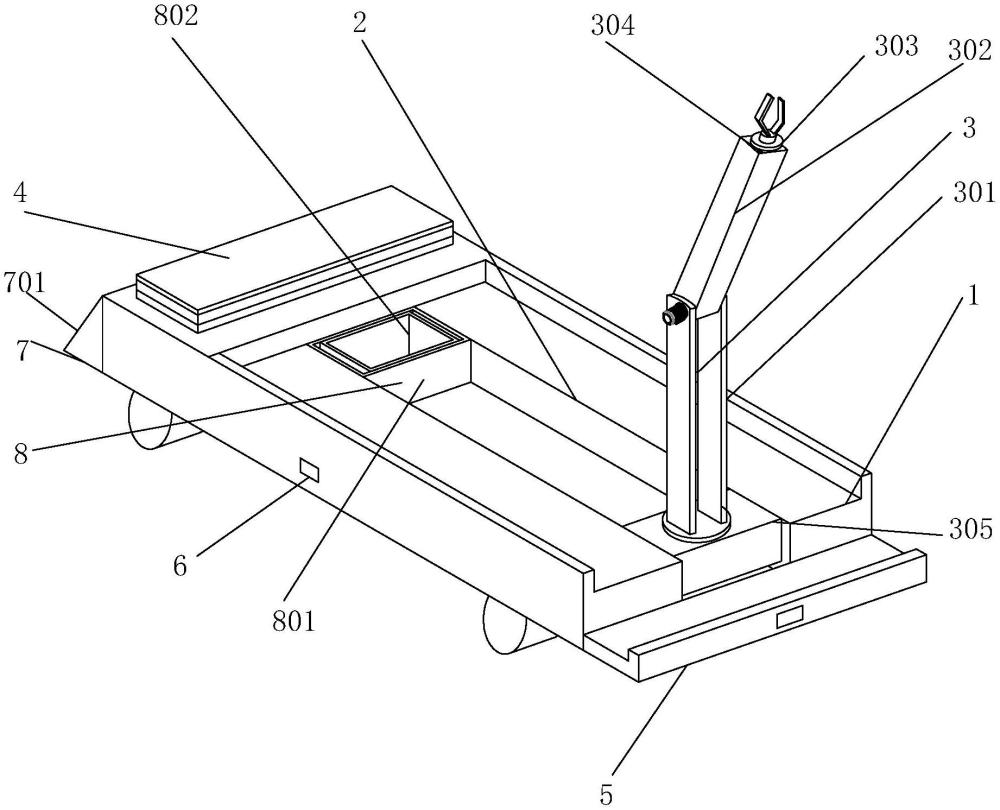
3、一种危化品监测机器人,包括自走小车,所述自走小车的顶端一侧开设有预留槽,且自走小车的顶端另一侧固定有设备安装柜,所述预留槽的内部一侧设置有取样机构;
4、所述取样机构包括转动电机,所述转动电机嵌装在自走小车的内壁,且转动电机的动力输出端连接有转动杆,所述转动杆穿入预留槽一端的外部套设有转动块,且转动块的上方转动连接有支撑臂,所述支撑臂远离转动块的一端转动连接有转动臂,且转动臂远离支撑臂的外壁嵌装有摄像头,所述转动臂外壁摄像头的一侧转动连接有夹取端。
5、通过采用上述技术方案,通过自走小车托载取样机构等组件移动,从而可以进行远程操控和取样返回,提高工作人员的安全性。
6、可选的,所述转动杆贯穿至转动块的内部,且转动块通过转动杆与转动电机之间构成转动结构。
7、通过采用上述技术方案,经转动电机带动转动杆,从而让转动块转动,让取样机构进入预留槽,减小监测机器人的体积,可以在障碍物多的地方进行移动。
8、可选的,所述自走小车的后端固定安装有后挡板,且后挡板和自走小车的外壁均嵌装有雷达传感器。
9、通过采用上述技术方案,自走小车四周均设有雷达传感器,从而能够观察四周并规避障碍物。
10、可选的,所述自走小车的前端设置有清障机构,所述清障机构包括结构板,两个所述结构板固定在自走小车的前端两侧,且两个结构板的相对面外壁固定有前挡板,所述前挡板的外壁嵌装有驱动电机,且驱动电机的动力端连接有连接杆,所述连接杆贯穿前挡板的一端固定有推送板。
11、通过采用上述技术方案,经结构板和前挡板组成防护的形式,避免移动过程发生磕碰。
12、可选的,所述推送板通过连接杆与驱动电机之间构成转动结构,且推送板与前挡板紧密贴合。
13、通过采用上述技术方案,推送板经连接杆,在驱动电机的带动下向外转动,从而推送前方障碍物向两侧移动,避免影响监测机器人移动。
14、可选的,所述预留槽的内部另一侧设置有收纳机构,所述收纳机构包括承载壳,所述承载壳固定在预留槽的内部一侧,且承载壳的内壁两侧连接有弹性垫,所述承载壳的内部底端固定有阻尼弹簧,且阻尼弹簧的上方设置有收纳盒。
15、通过采用上述技术方案,通过收纳盒便于放置取样机构取样的危化品,避免夹取危化品返回时发生磕碰或掉落。
16、可选的,所述承载壳通过阻尼弹簧与收纳盒之间构成弹性结构,且承载壳与弹性垫粘合连接。
17、通过采用上述技术方案,通过阻尼弹簧弹性支撑和夹持收纳盒,便于稳定托载危化品进行移动。
18、综上所述,本实用新型具有以下有益效果:
19、1.本实用新型通过取样机构的支撑臂、转动臂和夹取端转动调节夹持危化品,经摄像头便于观察夹取端工作,转动电机工作带动转动杆让转动块转动,使收缩的取样机构位于预留槽内,减小自走小车体积,便于在工厂、车间等复杂移动,自走小车信号连接在远程电脑端,电脑端与设备安装柜内的环境监测传感器、视频雷达等监测设备信号连接,便于拍摄并把监测数据传输回进行观看,进行远程监控和取样提高工作人员的安全。
20、2.本实用新型通过当出现障碍物时,通过驱动电机工作带动连接杆,从而让推送板向两侧转动,推开前方障碍物保持监测机器人正常移动,经结构板固定的前挡板,对监测机器人起到保护效果。
21、3.本实用新型通过经取样机构取样并放置收纳盒进行存储,收纳盒位于承载壳内,通过阻尼弹簧弹性夹持和支撑,具有一定减震性,在非安装阻尼弹簧的两侧粘合弹性垫避免发生磕碰从而对危化品造成影响。
技术特征:
1.一种危化品监测机器人,包括自走小车(1),其特征在于:所述自走小车(1)的顶端一侧开设有预留槽(2),且自走小车(1)的顶端另一侧固定有设备安装柜(4),所述预留槽(2)的内部一侧设置有取样机构(3);
2.根据权利要求1所述的一种危化品监测机器人,其特征在于:所述转动杆(306)贯穿至转动块(305)的内部,且转动块(305)通过转动杆(306)与转动电机(307)之间构成转动结构。
3.根据权利要求1所述的一种危化品监测机器人,其特征在于:所述自走小车(1)的后端固定安装有后挡板(5),且后挡板(5)和自走小车(1)的外壁均嵌装有雷达传感器(6)。
4.根据权利要求1所述的一种危化品监测机器人,其特征在于:所述自走小车(1)的前端设置有清障机构(7),所述清障机构(7)包括结构板(701),两个所述结构板(701)固定在自走小车(1)的前端两侧,且两个结构板(701)的相对面外壁固定有前挡板(705),所述前挡板(705)的外壁嵌装有驱动电机(702),且驱动电机(702)的动力端连接有连接杆(703),所述连接杆(703)贯穿前挡板(705)的一端固定有推送板(704)。
5.根据权利要求4所述的一种危化品监测机器人,其特征在于:所述推送板(704)通过连接杆(703)与驱动电机(702)之间构成转动结构,且推送板(704)与前挡板(705)紧密贴合。
6.根据权利要求1所述的一种危化品监测机器人,其特征在于:所述预留槽(2)的内部另一侧设置有收纳机构(8),所述收纳机构(8)包括承载壳(801),所述承载壳(801)固定在预留槽(2)的内部一侧,且承载壳(801)的内壁两侧连接有弹性垫(803),所述承载壳(801)的内部底端固定有阻尼弹簧(804),且阻尼弹簧(804)的上方设置有收纳盒(802)。
7.根据权利要求6所述的一种危化品监测机器人,其特征在于:所述承载壳(801)通过阻尼弹簧(804)与收纳盒(802)之间构成弹性结构,且承载壳(801)与弹性垫(803)粘合连接。
技术总结
本技术公开了一种危化品监测机器人,涉及危化品监测技术领域,改善进行移动式取样的问题,包括自走小车,所述自走小车的顶端一侧开设有预留槽,且自走小车的顶端另一侧固定有设备安装柜,所述预留槽的内部一侧设置有取样机构。本技术通过取样机构的支撑臂、转动臂和夹取端转动调节夹持危化品,经摄像头便于观察夹取端工作,转动电机工作带动转动杆让转动块转动,使收缩的取样机构位于预留槽内,减小自走小车体积,便于在工厂、车间等复杂移动,自走小车信号连接在远程电脑端,电脑端与设备安装柜内的环境监测传感器、视频雷达等监测设备信号连接,便于拍摄并把监测数据传输回进行观看,进行远程监控和取样提高工作人员的安全。
技术研发人员:李可田,李健,李泽浩
受保护的技术使用者:深圳市正杰智能工程有限公司
技术研发日:20231220
技术公布日:2024/8/26
- 还没有人留言评论。精彩留言会获得点赞!