一种隧道巡检机器人用抱轨行走装置的制作方法
本技术涉及隧道巡检,具体是一种隧道巡检机器人用抱轨行走装置。
背景技术:
1、目前公路隧道内的巡检工作都是通过人工来完成,每次巡检都需要2人相互配合完成巡检作业,为了实现隧道巡检的无人化和智能化,研发出了巡检机器人代替巡检人员来实现隧道巡检和隧道交通监测,是智慧交通发展的方向。隧道巡检机器人搭载全景相机、高清摄像机、双光谱网络球机、无线移动终端等装备,可完成对隧道面裂缝、渗水、塌方等检测、隧道精确定位、隧道点云扫描、交通运输工具运行状态监测与隧道快速巡检等功能,并通过无线通信网络实现传感数据准确、快速传输至隧道交通集控中心。
2、目前现有的隧道巡检机器人,以电池供电驱动行走机构沿特定轨道实现快速移动,例如工字钢轨道、定制件轨道,均属于不易加工的零件,且运行轨道安装于隧道内的穹顶上,距地面高度为5米,现有的轨道较重,轨道连接较为复杂,需要多人协作才能安装,且安装过程繁琐;其次,由于隧道多位于山区,环境复杂多变,工字钢轨道、定制件轨道的表面容易堆积异物以及易出现积灰等情况,导致巡检机器人在行驶过程中存在安全隐患,且难以清理,维护成本高。
3、因此,有必要发明一种隧道巡检机器人用抱轨行走装置来解决上述问题。
技术实现思路
1、本实用新型为了解决现有的巡检机器人轨道存在安装繁琐、易堆积异物及灰尘的问题,提供了一种隧道巡检机器人用抱轨行走装置。
2、本实用新型是采用如下技术方案实现的:
3、一种隧道巡检机器人用抱轨行走装置,包括固定安装于隧道穹顶的轨道组件,轨道组件上运行有巡检机器人;轨道组件包括若干对圆管,相邻两对圆管之间通过连接机构固定连接;巡检机器人的顶端安装有若干组抱轨行走机构;
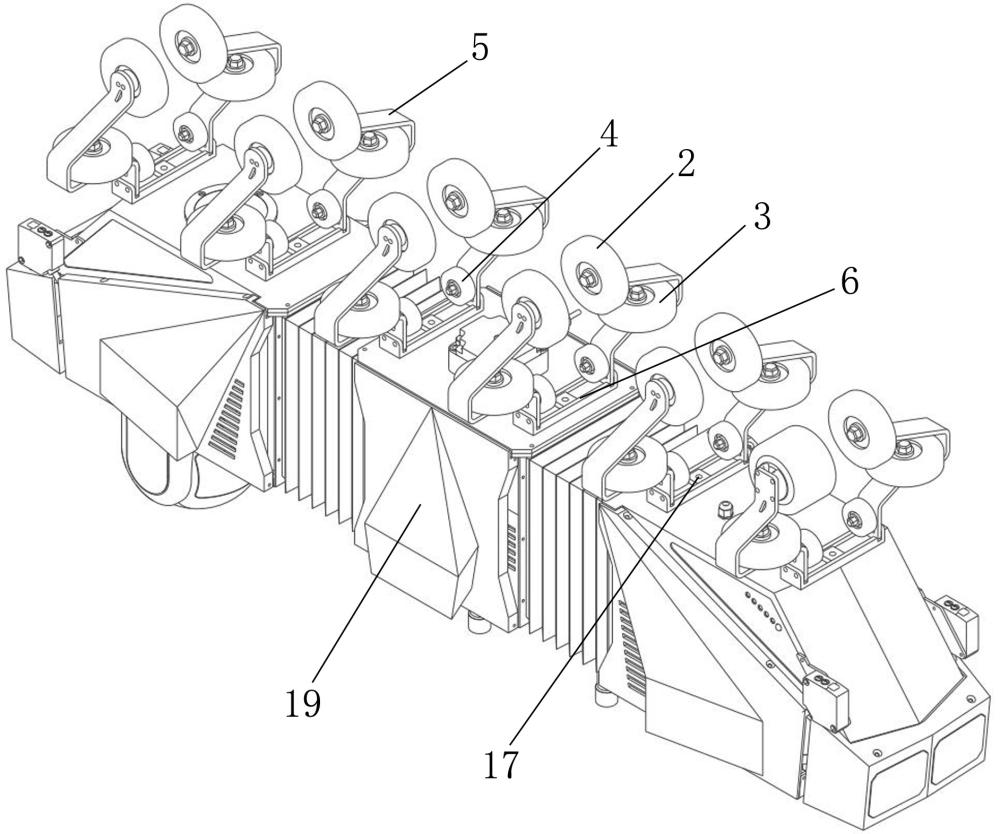
4、所述抱轨行走机构包括分别行走于两根圆管外侧壁顶端的两个行走轮、分别行走于两根圆管外侧壁侧端的两个抱轮、分别行走于两根圆管外侧壁底端的两个滚轮,位于同一侧的行走轮、抱轮和滚轮通过u型连接架转动连接,两个u型连接架的底端共同固定有固定座,固定座固定于巡检机器人的顶端。
5、进一步地,行走轮转动安装于u型连接架的顶端,抱轮转动安装于u型连接架的中部,滚轮转动安装于u型连接架的底端,且抱轮横向设置。
6、进一步地,所述连接机构包括位于两对圆管之间的中间块,中间块的两端均开设有与两根圆管对应匹配的半圆连接槽,每根圆管的端部均螺纹连接有圆柱螺纹块,圆柱螺纹块靠近中间块的端部一体固定有连接块,中间块的两个侧端均固定有半圆固定块,半圆固定块靠近中间块的端部开设有半圆连接槽i,半圆连接槽和半圆连接槽i共同组成圆柱形内腔,连接块插接于圆柱形内腔内;中间块的顶端固定有u型固定架,u型固定架的顶端固定于隧道穹顶上。
7、进一步地,所述中间块以及连接块上共同上下贯穿有销轴,销轴的底端插设有紧贴于中间块下表面的销钉;所述半圆固定块与中间块、u型固定架与中间块均是通过螺栓固定连接;所述连接块的外侧壁与圆柱形内腔之间夹设有橡胶圈。
8、进一步地,固定座的底端与巡检机器人的顶端之间固定夹设有聚氨酯块;其中一个行走轮上安装有电动轮毂,电动轮毂与巡检机器人内置的通讯板电性连接。
9、本实用新型结构设计合理可靠,解决了现有的巡检机器人轨道存在安装繁琐、易堆积异物及灰尘的问题,通过将圆管代替原本的工字钢轨道以及定制轨道,圆弧形的外侧面不易积灰更不易堆积异物,大大提高了轨道的清洁度和耐用度,降低了维护成本;同时针对圆管轨道组件的特征,提出了抱轨行走机构,不仅使得巡检机器人在圆管轨道组件上快速平稳运行,保证了隧道巡检的高效性,而且位于侧端的抱轮具有导向作用,能够及时调整巡检机器人的前进方向,确保巡检机器人的行进方向始终与圆管的敷设方向一致;进一步地,使用了聚氨酯柔性材料,具有一定阻尼以及减振和吸收高频的优点,进一步保证了行驶过程中的快速平稳性,具有安装操作简单,维护成本低的优点。
技术特征:
1.一种隧道巡检机器人用抱轨行走装置,其特征在于:包括固定安装于隧道穹顶的轨道组件,轨道组件上运行有巡检机器人(19);轨道组件包括若干对圆管(1),相邻两对圆管(1)之间通过连接机构固定连接;巡检机器人(19)的顶端安装有若干组抱轨行走机构;
2.根据权利要求1所述的一种隧道巡检机器人用抱轨行走装置,其特征在于:行走轮(2)转动安装于u型连接架(5)的顶端,抱轮(3)转动安装于u型连接架(5)的中部,滚轮(4)转动安装于u型连接架(5)的底端,且抱轮(3)横向设置。
3.根据权利要求1所述的一种隧道巡检机器人用抱轨行走装置,其特征在于:所述中间块(7)以及连接块(10)上共同上下贯穿有销轴(14),销轴(14)的底端插设有紧贴于中间块(7)下表面的销钉(15);所述半圆固定块(11)与中间块(7)、u型固定架(13)与中间块(7)均是通过螺栓固定连接;所述连接块(10)的外侧壁与圆柱形内腔之间夹设有橡胶圈(16)。
4.根据权利要求1所述的一种隧道巡检机器人用抱轨行走装置,其特征在于:固定座(6)的底端与巡检机器人(19)的顶端之间固定夹设有聚氨酯块(17);其中一个行走轮(2)上安装有电动轮毂(18),电动轮毂(18)与巡检机器人(19)内置的通讯板电性连接。
技术总结
本技术涉及隧道巡检技术领域,具体是一种隧道巡检机器人用抱轨行走装置;其包括轨道组件,轨道组件上运行有巡检机器人;轨道组件包括圆管,巡检机器人的顶端安装有抱轨行走机构;抱轨行走机构包括两个行走轮、两个抱轮、两个滚轮,位于同一侧的行走轮、抱轮和滚轮通过U型连接架转动连接,两个U型连接架的底端共同固定有固定座,固定座固定于巡检机器人的顶端;解决了现有的巡检机器人轨道存在安装繁琐、易堆积异物及灰尘的问题,圆管圆弧形的外侧面不易积灰更不易堆积异物,大大提高了轨道的清洁度和耐用度,降低了维护成本;抱轨行走机构不仅使得巡检机器人在圆管轨道组件上快速平稳运行,而且位于侧端的抱轮具有导向作用。
技术研发人员:刘坤,孙洁琼,邵凤旭,雷小斌,庄智超,郭石凯,姚军红,田岳坤,卢雨昊
受保护的技术使用者:中交通力建设股份有限公司
技术研发日:20231227
技术公布日:2024/8/15
- 还没有人留言评论。精彩留言会获得点赞!