一种机器人并联关节及机器人的制作方法
本技术涉及机器人关节,特别涉及一种机器人并联关节及机器人。
背景技术:
1、机器人关节的活动端一般需要设置有三个自由度,且每个自由度均需要一个驱动器进行驱动。
2、相关技术中,机器人关节处的三个驱动器一般采用串联的布置形式,即,第一个驱动器驱动活动端运动,第二个驱动器驱动第一个驱动器和活动端共同运动,第三个驱动器驱动第一个驱动器、第二个驱动器和活动端共同运动。
3、相应的,第二个驱动器和第三个驱动器的负载均较大,使得现有的机器人关节的耗能大。
技术实现思路
1、本实用新型的目的在于至少解决现有技术中存在的技术问题之一,本实用新型第一方面提供了一种节能的机器人并联关节。本实用新型第二方面还提供了一种包括本实用新型第一方面并列关节的机器人。
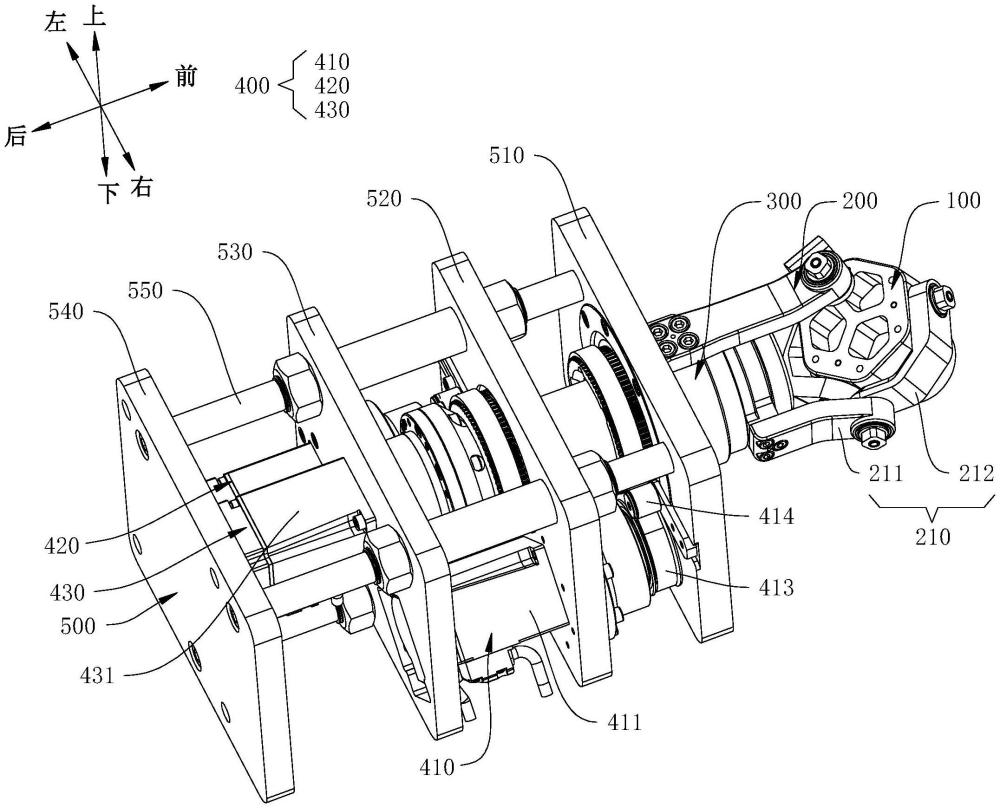
2、根据本实用新型第一方面实施例提供的机器人并联关节,包括活动件、连杆组件、传动组件和驱动组件;连杆组件包括至少三个连杆结构,连杆结构沿活动件的周向分布,且与活动件的周面传动连接;传动组件包括至少三根传动轴,各个传动轴同轴设置且依次套设,各个传动轴独立可转动设置,传动轴与连杆结构一一对应地传动连接;驱动组件包括至少三个驱动结构,驱动结构与传动轴一一对应地传动连接,驱动结构能够驱动传动轴绕自身轴线旋转。
3、本实用新型所述的机器人并联关节至少具有以下有益效果:在本实用新型的机器人并联关节中,由于各个驱动结构均能够通过传动轴和连杆结构直接驱动活动件活动,减少了驱动结构的额外负载,降低了驱动结构的耗能,从而降低了整个机器人并联关节的耗能。
4、根据本实用新型第一方面实施例所述的机器人并联关节,还包括机架,传动组件包括第一传动轴,第一传动轴通过第一轴承穿设于机架上,第一传动轴靠近活动件的一端的外周面与连杆结构固定连接。
5、根据本实用新型第一方面实施例所述的机器人并联关节,驱动组件包括第一驱动结构,第一驱动结构包括第一驱动器、第一带轮和第一传动带,第一带轮与第一传动轴背离活动件的一端连接,且第一带轮通过第一轴承与机架可转动连接,第一驱动器通过第一传动带与第一带轮传动连接,且第一驱动器能够通过第一传动带驱动第一带轮旋转。
6、根据本实用新型第一方面实施例所述的机器人并联关节,传动组件还包括第二传动轴,第二传动轴穿设于第一传动轴内,第一传动轴靠近活动件的端面设有环形限位部,环形限位部和第二传动轴之间通过第二轴承可转动连接,第二传动轴远离活动件的一端通过第三轴承与机架可转动连接。
7、根据本实用新型第一方面实施例所述的机器人并联关节,驱动组件包括第二驱动结构,第二驱动结构包括第二驱动器、第二带轮和第二传动带,第二带轮与第二传动轴背离活动件的一端连接,第二驱动器通过第二传动带与第二带轮传动连接,且第二驱动器能够通过第二传动带驱动第二带轮旋转。
8、根据本实用新型第一方面实施例所述的机器人并联关节,传动组件还包括第三传动轴和第一端盖,第三传动轴穿设于第二传动轴内,第一端盖与第二传动轴靠近活动件的一端连接,第一端盖和第三传动轴之间通过第四轴承可转动连接。
9、根据本实用新型第一方面实施例所述的机器人并联关节,驱动组件还包括第三驱动结构,第三驱动结构包括第三驱动器和减速器,第三驱动器通过减速器与第三传动轴背离活动件的一端传动连接。
10、根据本实用新型第一方面实施例所述的机器人并联关节,传动组件还包括第二端盖,第二端盖与第三传动轴靠近活动件的一端连接;连杆组件包括三个连杆结构,三个连杆结构均包括第一连接杆和第二连接杆,第一连接杆与第二连接杆可转动连接,三个第一连接杆分别与第一传动轴的周面、第一端盖和周面和第二端盖的周面连接,三个第二连接杆分别与活动件的周面转动连接。
11、根据本实用新型第一方面实施例所述的机器人并联关节,第二连接杆为弧形杆。
12、根据本实用新型第二方面实施例提供的机器人,包括本实用新型第一方面实施例提供的机器人并联关节。
13、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种机器人并联关节,其特征在于,包括:
2.根据权利要求1所述的一种机器人并联关节,其特征在于,还包括机架,
3.根据权利要求2所述的一种机器人并联关节,其特征在于,所述驱动组件包括第一驱动结构,所述第一驱动结构包括第一驱动器、第一带轮和第一传动带,所述第一带轮与所述第一传动轴背离所述活动件的一端连接,且所述第一带轮通过所述第一轴承与所述机架可转动连接,所述第一驱动器通过所述第一传动带与所述第一带轮传动连接,且所述第一驱动器能够通过所述第一传动带驱动所述第一带轮旋转。
4.根据权利要求2所述的一种机器人并联关节,其特征在于,所述传动组件还包括第二传动轴,所述第二传动轴穿设于所述第一传动轴内,所述第一传动轴靠近所述活动件的端面设有环形限位部,所述环形限位部和所述第二传动轴之间通过第二轴承可转动连接,所述第二传动轴远离所述活动件的一端通过第三轴承与所述机架可转动连接。
5.根据权利要求4所述的一种机器人并联关节,其特征在于,所述驱动组件包括第二驱动结构,所述第二驱动结构包括第二驱动器、第二带轮和第二传动带,所述第二带轮与所述第二传动轴背离所述活动件的一端连接,所述第二驱动器通过所述第二传动带与所述第二带轮传动连接,且所述第二驱动器能够通过所述第二传动带驱动所述第二带轮旋转。
6.根据权利要求4所述的一种机器人并联关节,其特征在于,所述传动组件还包括第三传动轴和第一端盖,所述第三传动轴穿设于所述第二传动轴内,所述第一端盖与所述第二传动轴靠近所述活动件的一端连接,所述第一端盖和所述第三传动轴之间通过第四轴承可转动连接。
7.根据权利要求6所述的一种机器人并联关节,其特征在于,所述驱动组件还包括第三驱动结构,所述第三驱动结构包括第三驱动器和减速器,所述第三驱动器通过所述减速器与所述第三传动轴背离所述活动件的一端传动连接。
8.根据权利要求6所述的一种机器人并联关节,其特征在于,所述传动组件还包括第二端盖,所述第二端盖与所述第三传动轴靠近所述活动件的一端连接;所述连杆组件包括三个连杆结构,三个所述连杆结构均包括第一连接杆和第二连接杆,所述第一连接杆与所述第二连接杆可转动连接,三个所述第一连接杆分别与所述第一传动轴的周面、所述第一端盖和周面和所述第二端盖的周面连接,三个所述第二连接杆分别与所述活动件的周面转动连接。
9.根据权利要求8所述的一种机器人并联关节,其特征在于,所述第二连接杆为弧形杆。
10.一种机器人,其特征在于,包括如权利要求1至9任一项所述的机器人并联关节。
技术总结
本技术公开了一种机器人并联关节及机器人,机器人并联关节包括活动件、连杆组件、传动组件和驱动组件;连杆组件包括至少三个连杆结构,连杆结构沿活动件的周向分布,且与活动件的周面传动连接;传动组件包括至少三根传动轴,各个传动轴同轴设置且依次套设,各个传动轴独立可转动设置,传动轴与连杆结构一一对应地传动连接;驱动组件包括至少三个驱动结构,驱动结构与传动轴一一对应地传动连接,驱动结构能够驱动传动轴绕自身轴线旋转。在本技术的机器人并联关节中,由于各个驱动结构均能够通过传动轴和连杆结构直接驱动活动件活动,减少了驱动结构的额外负载,降低了驱动结构的耗能,从而降低了整个机器人并联关节的耗能。
技术研发人员:郭文旭,谭军
受保护的技术使用者:深圳市领鹏智能科技有限公司
技术研发日:20231227
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!