一种治具搬运机构的制作方法
本技术涉及一种非标自动化设备上的功能机构,尤其是一种治具搬运机构。
背景技术:
1、如图1所示的治具,因为体积较大,整体较重,并且存在搬运需求,普通的机械夹爪无法承载其重量,因此需要专用的搬运机构。
技术实现思路
1、鉴于上述状况,有必要提供一种解决上述至少一种问题的治具搬运机构。
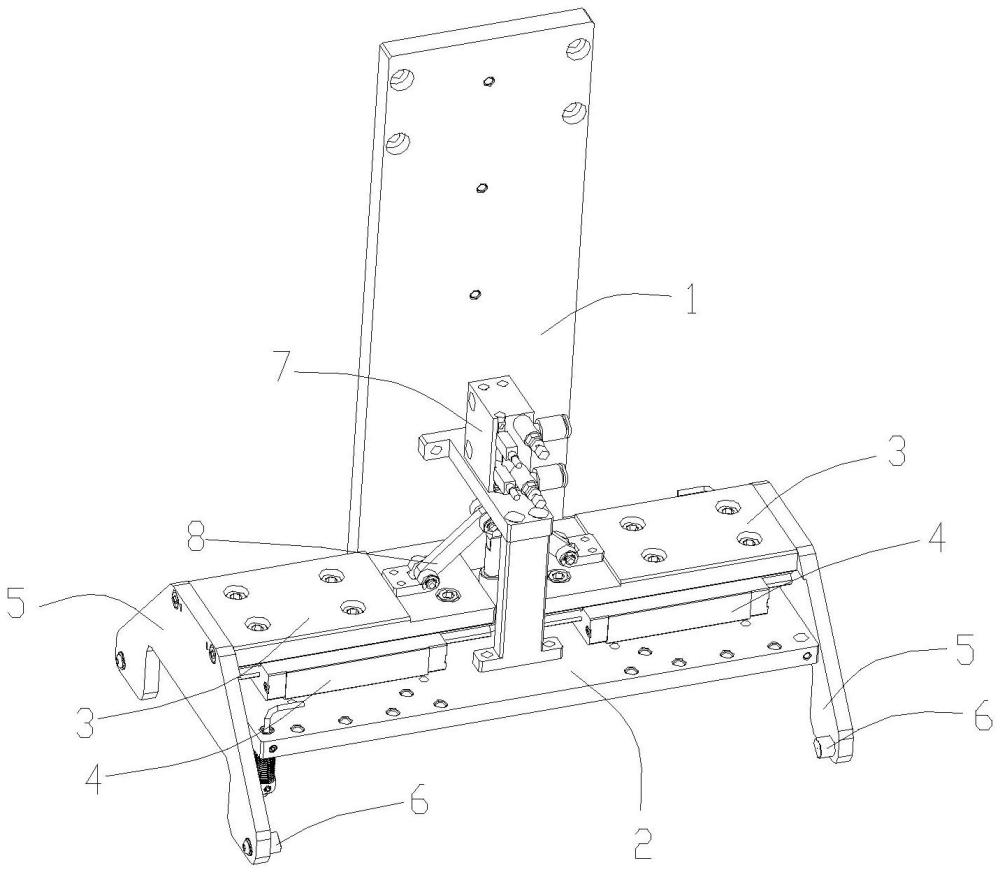
2、一种治具搬运机构,包括驱动夹爪横向移动的驱动件,所述夹爪上设置有水平设置的手指,所述手指与治具侧面的孔的位置对应,且所述手指可以插入孔中。
3、作为本实用新型的进一步方案:还包括固定组件,所述固定组件包括固定纵板和固定横板;
4、所述固定横板位于所述固定纵板的最下方,所述固定横板在搬运治具时位于治具的上方;
5、所述固定横板上设置传感器。
6、作为本实用新型的进一步方案:所述传感器有两个,位于所述固定横板的对角线上。
7、作为本实用新型的进一步方案:所述驱动件为气缸,所述驱动件的输出端竖直向下设置,所述驱动件的输出端通过连杆连接所述夹爪的活动块,所述活动块远离所述驱动件的一端设置夹板,所述手指设置在所述夹板上。
8、作为本实用新型的进一步方案:所述活动块有两个,分布在所述驱动件的两侧,两个所述活动块在所述驱动件运作时,执行相向或相离运动。
9、作为本实用新型的进一步方案:所述夹爪有两个,单个所述夹爪上的手指也设置有两个;
10、单个所述夹爪上的两个手指之间的间距与治具上的孔间距对应;
11、两个所述夹爪上的手指彼此之间位置对应,四个所述手指的位置处于同一水平面,且正好为矩形的四个顶点。
12、上述治具搬运机构由于采用了水平横向开合的夹爪,配合手指实现与治具的夹持配合,横向移动的夹爪实现解锁与开锁的动作,因此只需要很小功率的驱动部件,利用水平横置的手指勾住治具,以较小成本和较为简单的结构实现大重量的治具搬运工作。
技术特征:
1.一种治具搬运机构,其特征在于:包括驱动夹爪横向移动的驱动件,所述夹爪上设置有水平设置的手指,所述手指与治具侧面的孔的位置对应,且所述手指可以插入孔中。
2.如权利要求1所述的治具搬运机构,其特征在于:还包括固定组件,所述固定组件包括固定纵板和固定横板;
3.如权利要求2所述的治具搬运机构,其特征在于:所述传感器有两个,位于所述固定横板的对角线上。
4.如权利要求1所述的治具搬运机构,其特征在于:所述驱动件为气缸,所述驱动件的输出端竖直向下设置,所述驱动件的输出端通过连杆连接所述夹爪的活动块,所述活动块远离所述驱动件的一端设置夹板,所述手指设置在所述夹板上。
5.如权利要求4所述的治具搬运机构,其特征在于:所述活动块有两个,分布在所述驱动件的两侧,两个所述活动块在所述驱动件运作时,执行相向或相离运动。
6.如权利要求1所述的治具搬运机构,其特征在于:所述夹爪有两个,单个所述夹爪上的手指也设置有两个;
技术总结
本技术涉及一种治具搬运机构,包括驱动夹爪横向移动的驱动件,所述夹爪上设置有水平设置的手指,所述手指与治具侧面的孔的位置对应,且所述手指可以插入孔中。上述治具搬运机构由于采用了水平横向开合的夹爪,配合手指实现与治具的夹持配合,横向移动的夹爪实现解锁与开锁的动作,因此只需要很小的执行部件,利用水平横置的手指勾住治具,以较小成本和较为简单的结构实现大重量的治具搬运工作。
技术研发人员:王青海,胡左厚,张育林
受保护的技术使用者:湖南健坤精密科技有限公司
技术研发日:20231228
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!