一种自动折叠机械臂的制作方法
本技术涉及机械臂,尤其涉及一种自动折叠机械臂。
背景技术:
1、机械臂是自动化生产线常用的机械结构,现有自动化生产线上的机械臂结构分为两种:1.采用多关节折叠动作的多轴机械臂;2.通过多个丝杆传动机构进行xyz三轴方向行走的机械结构。
2、上述两种结构的机械臂存在以下缺陷:1.体积庞大,占地面积大,生产成本高;2.需要多组驱动机构(电机或气缸)完成动作,运动效率低,耗能高。
技术实现思路
1、本实用新型的目的在于针对现有技术的不足提供一种自动折叠机械臂,本实用新型将滑轨结构和绕固定点转动结构结合在一起,达到自动折叠机械臂的效果,尺寸小,占地面积小,作业空间大。
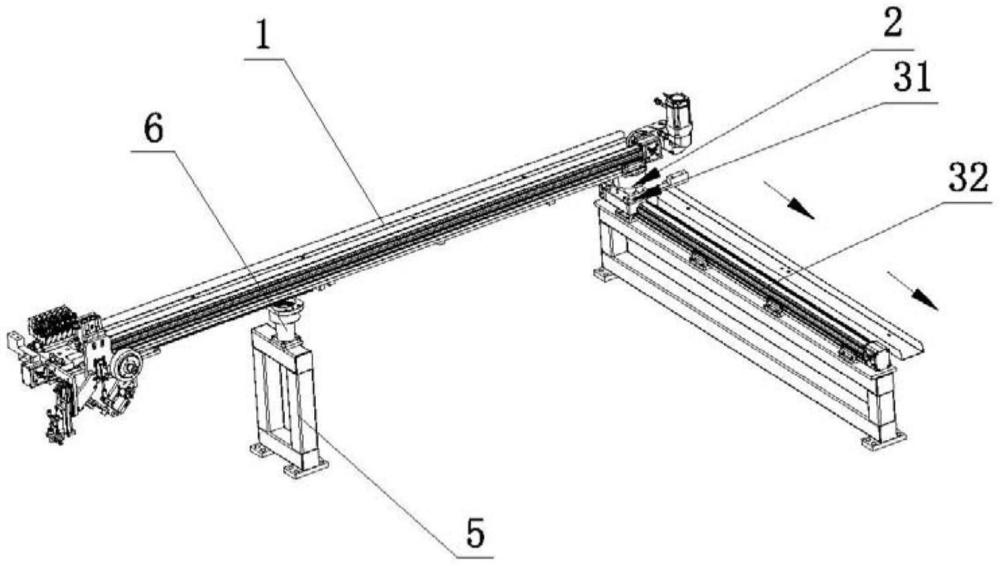
2、本实用新型是通过以下技术方案来实现的,一种自动折叠机械臂,包括第一滑轨,所述第一滑轨的右下端设置有第一转轴,所述第一转轴的下端设置有第一滑块、与第一滑块滑动连接的第二滑轨和用于驱动第一滑块沿第二滑轨滑动的驱动机构,所述第一滑轨的右下端设置有固定板,所述固定板的下端设置有第一轴承,所述第一转轴的上端与第一轴承传动连接,所述第一转轴的下端与第一滑块固定连接;所述第一滑轨的左下端设置有第三滑轨和第二滑块,所述第三滑轨和第二滑块滑动连接,所述第二滑块的下方设置有支座,所述支座的上端设置有第二转轴,所述第二滑块的下端设置有第二轴承,所述第二转轴的上端与第二轴承传动连接,所述第二转轴的下端与支座固定连接。
3、作为优选,所述第一滑块的上端设置有第一轴套,所述第一转轴的下端固定设置于第一轴套内。
4、作为优选,所述第二滑块的下端设置有固定基座,所述固定基座包括连接板和第二轴套,所述连接板和第二轴套一体成型设置,所述连接板与第二滑块固定连接,所述第二轴承设置于所述第二轴套内。
5、作为优选,所述驱动机构为丝杆传动机构。
6、本实用新型的有益效果:驱动机构用于驱动第一滑轨的右端在第二滑轨上沿x轴方向位移,在第一滑块的位移过程中,第一滑轨的右端的底部在第一轴承作用下绕第一转轴转动,不影响干涉第一滑块(即第一滑轨右端)位移;在第一滑轨的右端的位移过程中,第一滑轨的左端受到向右端方向一个拉扯力,该拉扯力驱动第二滑块沿第三滑轨滑动,在第二滑块活动过程中,第二滑块在第二轴承作用下绕第二转轴转动,不影响干涉第二滑块位移,取代y轴方向的移动机构,达到折叠y轴的技术效果;本实用新型将滑轨结构和绕固定点转动结构结合在一起,达到自动折叠机械臂的效果,尺寸小,占地面积小,作业空间大。
技术特征:
1.一种自动折叠机械臂,其特征在于:包括第一滑轨,所述第一滑轨的右下端设置有第一转轴,所述第一转轴的下端设置有第一滑块、与第一滑块滑动连接的第二滑轨和用于驱动第一滑块沿第二滑轨滑动的驱动机构,所述第一滑轨的右下端设置有固定板,所述固定板的下端设置有第一轴承,所述第一转轴的上端与第一轴承传动连接,所述第一转轴的下端与第一滑块固定连接;所述第一滑轨的左下端设置有第三滑轨和第二滑块,所述第三滑轨和第二滑块滑动连接,所述第二滑块的下方设置有支座,所述支座的上端设置有第二转轴,所述第二滑块的下端设置有第二轴承,所述第二转轴的上端与第二轴承传动连接,所述第二转轴的下端与支座固定连接。
2.根据权利要求1所述的一种自动折叠机械臂,其特征在于:所述第一滑块的上端设置有第一轴套,所述第一转轴的下端固定设置于第一轴套内。
3.根据权利要求1所述的一种自动折叠机械臂,其特征在于:所述第二滑块的下端设置有固定基座,所述固定基座包括连接板和第二轴套,所述连接板和第二轴套一体成型设置,所述连接板与第二滑块固定连接,所述第二轴承设置于所述第二轴套内。
4.根据权利要求1所述的一种自动折叠机械臂,其特征在于:所述驱动机构为丝杆传动机构。
技术总结
本技术涉及机械臂技术领域,尤其涉及一种自动折叠机械臂,包括第一滑轨,第一滑轨的右下端设置有第一转轴,第一转轴的下端设置有第一滑块、与第二滑轨和驱动机构,第一滑轨的右下端设置有固定板,固定板的下端设置有第一轴承,第一转轴的上端与第一轴承传动连接,第一转轴的下端与第一滑块固定连接;第一滑轨的左下端设置有第三滑轨和第二滑块,第二滑块的下方设置有支座,支座的上端设置有第二转轴,第二滑块的下端设置有第二轴承,第二转轴的上端与第二轴承传动连接,第二转轴的下端与支座固定连接;本技术将滑轨结构和绕固定点转动结构结合在一起,达到自动折叠机械臂的效果,尺寸小,占地面积小,作业空间大。
技术研发人员:高其伟,郭志坚
受保护的技术使用者:广东墨淳智能科技有限公司
技术研发日:20231229
技术公布日:2024/8/26
- 还没有人留言评论。精彩留言会获得点赞!