一种机器人行走组件支架的制作方法
本技术属于移动机器人,具体涉及一种机器人行走组件支架。
背景技术:
1、自移动机器人是一种能够在地面上行进并能够执行运输、清洁等动作的设备,自移动机器人通常包括壳体、主控板、行走组件等零部件,主控板安装于壳体内,行走组件安装于壳体的底部并与主控板电连接,行走组件用于驱动自移动机器人在地面上行进。
2、现有的部分机器人行走组件,其结构较为复杂,不方便检修,在检修时往往需要进行拆卸,降低了工作效率。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种机器人行走组件支架,以解决上述背景技术中提出的现有的部分机器人行走组件,其结构较为复杂,不方便检修,在检修时往往需要进行拆卸,降低了工作效率的问题。
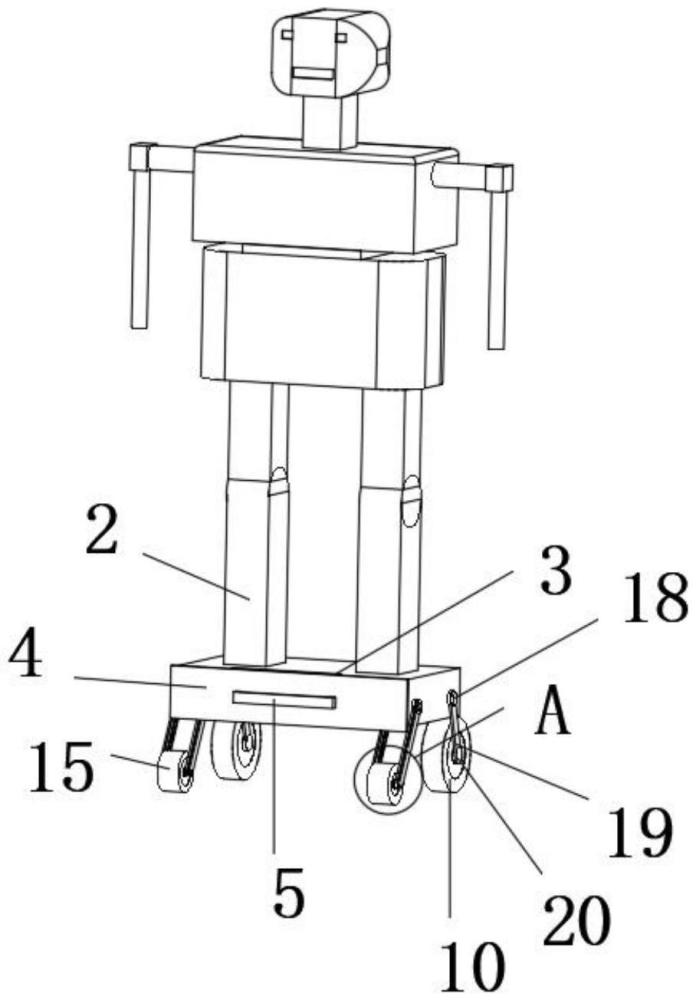
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人行走组件支架,包括驱动箱,所述驱动箱顶部的一侧固定连接有合页,所述合页的一侧转动连接有门板,所述驱动箱内部的下端固定连接有电机,所述电机的一侧固定连接有输出衔接器,所述输出衔接器的一侧转动连接有第一固定轴,所述第一固定轴的一端转动连接有固定套筒,所述第一固定轴外侧的两端均固定连接有第一齿轮,所述第一齿轮的外侧转动连接有履带,下端所述第一齿轮的内部固定连接有第一固定轴,所述第一固定轴的外侧固定连接有第二齿轮,所述第二齿轮的外侧转动连接有第一轮子,所述驱动箱内部的下端对称固定连接有支撑座,所述支撑座的一侧固定连接有第二固定轴,所述第二固定轴的一端固定连接有固定座,所述第二固定轴两端的外侧均固定连接有支撑杆,所述支撑杆底部固定连接有第三固定轴,所述第三固定轴的外侧转动连接有第二轮子。
3、优选的,所述门板的一侧固定连接有把手。
4、优选的,所述第一齿轮对称设置有两个,所述第一齿轮转动连接于履带的两端。
5、优选的,所述第一固定轴靠近履带的两端均固定连接有护板。
6、优选的,所述电机和支撑座均对称设置有两个。
7、优选的,所述门板与驱动箱之间为卡合连接。
8、优选的,所述第二轮子和第一轮子均采用耐磨材质。
9、优选的,所述第一齿轮和第二齿轮的外表面均设置有耐腐蚀层。
10、与现有技术相比,本实用新型提供了一种机器人行走组件支架,具备以下有益效果:
11、1、本实用新型通过设置合页,在需要进行检修工作时,通过手持把手打开门板,即可进行正常的检修工作,省去拆卸等麻烦,提高了工作的效率。
12、2、本实用新型通过设置第一齿轮,在电机的驱动下,第一固定轴随着转动,带动第一齿轮和第二齿轮,通过第一齿轮的转动,履带也随着转动,从而带动第一固定轴进行转动,第一固定轴外侧固定的第二齿轮与第一轮子之间进行转动,从而达到移动的效果,第一轮子移动并带动第二轮子与之一起进行移动,结构简单,操作便捷。
13、该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本实用新型结构科学合理,使用安全方便,为人们提供了很大的帮助。
技术特征:
1.一种机器人行走组件支架,包括驱动箱(1),其特征在于:所述驱动箱(1)顶部的一侧固定连接有合页(3),所述合页(3)的一侧转动连接有门板(4),所述驱动箱(1)内部的下端固定连接有电机(6),所述电机(6)的一侧固定连接有输出衔接器(7),所述输出衔接器(7)的一侧转动连接有第一固定轴(8),所述第一固定轴(8)的一端转动连接有固定套筒(9),所述第一固定轴(8)外侧的两端均固定连接有第一齿轮(11),所述第一齿轮(11)的外侧转动连接有履带(12),下端所述第一齿轮(11)的内部固定连接有第一固定轴(8),所述第一固定轴(8)的外侧固定连接有第二齿轮(14),所述第二齿轮(14)的外侧转动连接有第一轮子(15),所述驱动箱(1)内部的下端对称固定连接有支撑座(16),所述支撑座(16)的一侧固定连接有第二固定轴(17),所述第二固定轴(17)的一端固定连接有固定座(18),所述第二固定轴(17)两端的外侧均固定连接有支撑杆(19),所述支撑杆(19)底部固定连接有第三固定轴(20),所述第三固定轴(20)的外侧转动连接有第二轮子(10)。
2.根据权利要求1所述的一种机器人行走组件支架,其特征在于:所述门板(4)的一侧固定连接有把手(5)。
3.根据权利要求1所述的一种机器人行走组件支架,其特征在于:所述第一齿轮(11)对称设置有两个,所述第一齿轮(11)转动连接于履带(12)的两端。
4.根据权利要求1所述的一种机器人行走组件支架,其特征在于:所述第一固定轴(8)靠近履带(12)的两端均固定连接有护板(13)。
5.根据权利要求1所述的一种机器人行走组件支架,其特征在于:所述电机(6)和支撑座(16)均对称设置有两个。
6.根据权利要求1所述的一种机器人行走组件支架,其特征在于:所述门板(4)与驱动箱(1)之间为卡合连接。
7.根据权利要求1所述的一种机器人行走组件支架,其特征在于:所述第二轮子(10)和第一轮子(15)均采用耐磨材质。
8.根据权利要求1所述的一种机器人行走组件支架,其特征在于:所述第一齿轮(11)和第二齿轮(14)的外表面均设置有耐腐蚀层。
技术总结
本技术公开了一种机器人行走组件支架,包括驱动箱,所述驱动箱顶部的一侧固定连接有合页,所述合页的一侧转动连接有门板,所述驱动箱内部的下端固定连接有电机,所述电机的一侧固定连接有输出衔接器,所述输出衔接器的一侧转动连接有第一固定轴,所述第一固定轴的一端转动连接有固定套筒,所述第一固定轴外侧的两端均固定连接有第一齿轮,使用时,通过设置合页,在需要进行检修工作时,通过手持把手打开门板,即可进行正常的检修工作,省去拆卸等麻烦,提高了工作的效率,通过设置第一齿轮,在电机的驱动下,第一固定轴随着转动,带动第一齿轮和第二齿轮,通过第一齿轮的转动,履带也随着转动。
技术研发人员:张静
受保护的技术使用者:长沙公尚机器人有限公司
技术研发日:20231231
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!