一种四足机器人的多模式急停机构的制作方法
本技术涉及四足机器人,具体为一种四足机器人的多模式急停机构。
背景技术:
1、四足机器人是一种仿生机器人,设计灵感来自于动物的四肢运动。它们通常由四条腿组成,每条腿都配备了至少一个电机和传感器,以便机器人可以感知其周围环境并移动,通常被设计成可以在各种地形和环境中移动,包括平坦地面、不平整的地形、楼梯、狭窄的空间和危险环境。它们还可以用于探索未知地区、执行危险任务和进行救援工作。
2、在机器人调试时,如遇到危险情形,且机器人不受控制时即将撞向建筑或行人时,测试人员通过按下急停开关,使四足机器人停止运行,最大限度降低损坏。
3、四足机器人的急停开关通常是凸出于机架表面,急停开关外周缺少保护结构,在机器人行走过程中,急停开关容易被外物(树枝、枝叶及岩石)剐蹭到而意外触发导致四足机器人停止工作,急停开关被剐蹭严重还容易造成损坏,特别是四足机器人在恶劣环境(森林、丛林及地震灾区)中工作。
4、因此,如何设计一款能够防止急停开关被外物剐蹭而意外触发的四足机器人成为亟待解决的问题。
技术实现思路
1、本实用新型的目的是为了提供一种四足机器人的多模式急停机构,能够防止急停开关被外物剐蹭而意外触发导致四足机器人停止工作,使四足机器人正常完成工作。
2、为了实现上述发明目的,本实用新型采用了以下技术方案:
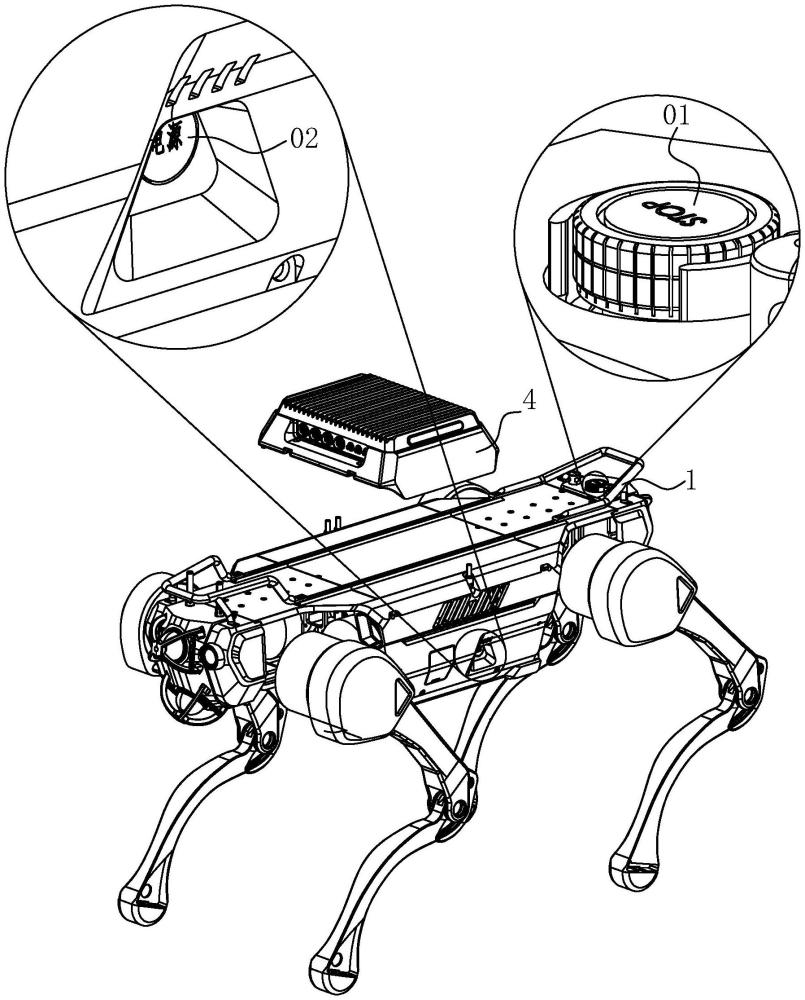
3、一种四足机器人的多模式急停机构,包括机架、用电器、电池、驱动电路,机架分为行动方向上的前端和后端,驱动电路通过主线耦接电池,主线上设有线路急停开关,线路急停开关位于机架后端上表面,线路急停开关外周侧设有限位侧壁,限位侧壁与线路急停开关同高。
4、与现有技术相比,采用了上述技术方案的四足机器人的多模式急停机构,具有如下有益效果:
5、采用本实用新型的四足机器人的多模式急停机构,限位侧壁围绕线路急停开关外周,对线路急停开关起到保护作用,四足机器人在行走过程中,限位侧壁能够防止线路急停开关被外物(树枝、枝叶及岩石)剐蹭而意外触发导致四足机器人停止工作,并防止线路急停开关受损,使四足机器人正常完成工作。
6、优选的,线路急停开关外侧共设有多个限位侧壁,限位侧壁为弧形的侧壁,相邻的限位侧壁之间留有可容纳手指的间距。相邻的限位侧壁之间的间距提供足够大的空间让测试人员手指倾斜放入,测试人员手指倾斜更容易按下线路急停开关。
7、优选的,线路急停开关上方设有外部遮挡罩,外部遮挡罩下方为用于避免外物碰触线路急停开关的遮挡区域。外部遮挡罩对线路急停开关起到保护作用,在四足机器人后退时,外部遮挡罩阻挡住外物,进一步防止线路急停开关被外物剐蹭而意外触发导致四足机器人停止工作。
8、优选的,外部遮挡罩包括侧支撑杆、端杆和两个侧杆,侧杆连接至端杆两端,侧支撑杆一端同机架上表面固定,另一端和侧杆固定。外部遮挡罩不仅能够保护线路急停开关,还能提供测试人员抓握便于人工搬运:在四足机器人故障无法行动时,可以抓握机架后端外部遮挡罩的侧杆和端杆,另一端则可以通过其他搬运设备进行辅助托举,以进行四足机器人的搬运和转移。转移时外部遮挡罩的作用力位于机架的外壳上,不会对四足机器人的腿足和电机造成损坏。
9、除了上述内容中提到的线路急停开关,本实用新型还公开了“电源急停开关”和“指令急停开关”另外两种急停方式。
10、电源急停开关:位于机器人的电池位置,用于控制电池内电能输出,是机器人和背部的用电器(如救援设备、摄像头、激光雷达等)的主要供电枢纽,当按压电源急停开关后,电池停止对外供电,机器人和用电器全部断电。若是仅按压线路急停开关,只有机器人会断电,而背部的用电器依旧会正常供电。
11、优选的,机架侧面开设有凹槽,凹槽对准电源急停开关位置,凹槽槽底设有用于电源急停开关露出的缺口。电源急停开关位于凹槽内,能够防止电源急停开关被外物剐蹭而意外触发导致四足机器人停止工作。
12、优选的,凹槽所在机架侧面分为凸出壁和凹陷壁,凸出壁位于前端所在方向,凹陷壁位于后端所在方向。在四足机器人前进时,凸出壁能够阻挡住外物,进一步防止电源急停开关被外物剐蹭而意外触发导致四足机器人停止工作。
13、指令急停开关:为机器人的软急停开关,即通过发送指令的方式,让机器人的驱动电路接收到停机指令(指令急停开关耦接驱动电路),再由机器人的数据处理中心停止机器人动作,但是机器人未断电,机器人处于待机状态可重新通过遥控器或程序远程激活。指令急停开关位于机架后端面。
14、指令急停开关是通过发送信号,让机器人停止活动,但是各个电机的驱动电路部分未断电,可以有效避免因为意外断电而导致的线路元器件损坏。
15、优选的,机架后端面设有内凹式的槽孔,指令急停开关位于槽孔中,能够防止指令急停开关被外物剐蹭而意外触发导致四足机器人停止工作。
技术特征:
1.一种四足机器人的多模式急停机构,包括机架、用电器(4)、电池、驱动电路,机架分为行动方向上的前端和后端,所述驱动电路通过主线耦接电池,所述主线上设有线路急停开关(01),其特征在于:所述线路急停开关(01)位于机架后端上表面,线路急停开关(01)外周侧设有限位侧壁(10),限位侧壁(10)与线路急停开关(01)同高。
2.根据权利要求1所述的四足机器人的多模式急停机构,其特征在于:所述线路急停开关(01)外侧共设有多个限位侧壁(10),限位侧壁(10)为弧形的侧壁,相邻的限位侧壁(10)之间留有可容纳手指的间距。
3.根据权利要求1所述的四足机器人的多模式急停机构,其特征在于:所述线路急停开关(01)上方设有外部遮挡罩(1),外部遮挡罩(1)下方为用于避免外物碰触线路急停开关(01)的遮挡区域。
4.根据权利要求3所述的四足机器人的多模式急停机构,其特征在于:外部遮挡罩(1)包括侧支撑杆(13)、端杆(12)和两个侧杆(11),所述侧杆(11)连接至端杆(12)两端,侧支撑杆(13)一端同机架上表面固定,另一端和侧杆(11)固定。
5.根据权利要求1所述的四足机器人的多模式急停机构,其特征在于:所述电池带有用于控制电池内电能输出的电源急停开关(02)。
6.根据权利要求5所述的四足机器人的多模式急停机构,其特征在于:所述机架侧面开设有凹槽(20),所述凹槽(20)对准电源急停开关(02)位置,凹槽(20)槽底设有用于电源急停开关(02)露出的缺口。
7.根据权利要求6所述的四足机器人的多模式急停机构,其特征在于:所述凹槽(20)所在机架侧面分为凸出壁(21)和凹陷壁(22),所述凸出壁(21)位于前端所在方向,凹陷壁(22)位于后端所在方向。
8.根据权利要求1所述的四足机器人的多模式急停机构,其特征在于:还包括指令急停开关(03),所述指令急停开关(03)耦接驱动电路,指令急停开关(03)可以向驱动电路发送停止指令,用于停止驱动电路工作,所述指令急停开关(03)位于机架后端面。
9.根据权利要求8所述的四足机器人的多模式急停机构,其特征在于:机架后端面设有内凹式的槽孔(3),所述指令急停开关(03)位于槽孔(3)中。
技术总结
本技术公开了一种四足机器人的多模式急停机构,包括机架、用电器、电池、驱动电路,机器人设有三种急停模式:线路急停开关、电源急停开关和指令急停开关,其中线路急停开关位于机架后端上表面,线路急停开关外周侧设有限位侧壁,限位侧壁与线路急停开关同高。四足机器人在行走过程中,限位侧壁能够防止线路急停开关被外物(树枝、枝叶及岩石)剐蹭而意外触发导致四足机器人停止工作,并防止线路急停开关受损,使四足机器人正常完成工作。
技术研发人员:邓皓冉,蒋文康,惠堂懋,李超,朱秋国
受保护的技术使用者:杭州云深处科技有限公司
技术研发日:20231229
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!