具有提升机构的机器人的制作方法
本发明涉及一种被配置为将自身提升到其行进的表面上方的机器人、包括这种机器人的系统、以及由这种机器人执行的方法。
背景技术:
1、机器人系统可以用于仓库和其它存贮设施,以在高度结构化的环境中自动检索和处理物体。然而,对于使用多个不同机器人执行不同处理任务的特定设施而言,这种系统可能是昂贵的定制解决方案。这样的系统不适合于需要更大适应性和灵活性的存贮空间,或者需要在不同的时间服务于不同的目的(例如,具有变化的布局)的存贮空间。
2、本文所描述的实施例的目的是提供改进的机器人系统,以便于在各种位置存贮和处理物体。
3、将通过以下的详细描述来理解和了解这些实施例的布置,其中通过示例的方式并结合附图来进行这些详细描述。
技术实现思路
技术特征:
1.一种机器人,包括用于在一表面上移动所述机器人的驱动器和用于将所述机器人升高到所述表面上方以使得另一个相同的机器人能够在升高的所述机器人下方移动的提升机构。
2.根据权利要求1所述的机器人,其中,所述提升机构包括多个支腿,所述多个支腿被配置为横向地移入和移出所述机器人的其余部分的占位面并且纵向地延伸。
3.根据权利要求2所述的机器人,其中,所述多个支腿被配置为从所述机器人的所述其余部分的所述占位面移出到在所述占位面的对角线的延伸部分上与所述机器人的主体的角部偏离的位置,使得沿着垂直于所述主体的任何面的轴线,所述多个支腿都不会阻碍所述面。
4.根据权利要求2所述的机器人,其中,所述多个支腿被配置为从所述机器人的所述其余部分的所述占位面移出到与所述机器人的主体的一对相对面相邻的位置。
5.根据权利要求4所述的机器人,其中,所述位置均位于所述相对面的限定所述机器人的所述主体的角部的边缘处。
6.根据权利要求4所述的机器人,其中,所述支腿中的两个被移位到在所述相对面的限定所述机器人的所述主体的相对角部的边缘处的位置,并且其中,所述支腿中的两个被移位到沿着所述相对面途中与所述主体的另外两个角部分开至少所述多个支腿中的一个的宽度的位置。
7.根据权利要求2所述的机器人,其中,所述多个支腿被配置为线性地和/或通过绕平行于其长度的轴线旋转所述支腿,来移入和移出所述机器人的所述占位面。
8.根据权利要求2所述的机器人,包括一个或多个连接器,用于将所述支腿中的至少一个的端部连接到另一个相同机器人的支腿的相对端和/或连接到所述表面上的至少一个连接点。
9.根据权利要求2所述的机器人,包括位于以下位置中的至少一者处的电连接器或感应充电器:所述支腿中的至少一个的下端、所述支腿中的至少一个的上端、所述机器人的底表面或所述机器人的顶表面。
10.根据权利要求2所述的机器人,包括在所述机器人的上表面和下表面中的每一个上的电连接器或感应充电器,在所述机器人的所述下表面上的所述电连接器或感应充电器以有助于直通充电的方式与所述机器人的所述上表面上的所述电连接器或感应充电器导电连接。
11.根据权利要求1所述的机器人,其中,所述驱动器是完整驱动器。
12.根据权利要求1所述的机器人,其中,所述驱动器包括多个轮子,所述多个轮子被配置为绕竖直轴线枢转。
13.根据权利要求1所述的机器人,其中,所述驱动器被配置为使所述机器人移动跨过一个或多个相同机器人的上表面。
14.根据权利要求1所述的机器人,包括用于横向延伸所述机器人的上表面的至少一部分的一个或多个临时可展开的桥接支撑件。
15.根据权利要求1所述的机器人,包括用于确定其位置和/或移动和/或用于检测其附近的物体和/或其它机器人的一个或多个传感器。
16.根据任一前述权利要求所述的机器人,其中,所述机器人是用于容纳物体的容器。
17.根据权利要求16所述的机器人,其中,所述机器人是用于容纳物体的封闭容器。
18.根据权利要求16所述的机器人,其中,所述机器人限定用于接收物体的结构框架。
19.根据任一前述权利要求所述的机器人,包括一个或多个堆叠连接器,用于将所述机器人的基部连接到另一个相同机器人的上表面,和/或将所述机器人的上表面连接到相同机器人的基部。
20.一种包括多个根据权利要求1所述的机器人的系统。
21.一种操作多机器人系统的方法,所述方法包括第一机器人相对于一表面升高自身和这种第二机器人移动到所述第一机器人下方的空间中,其中所述第一机器人和第二机器人均包括用于移动自身的驱动器,并且所述第一机器人包括用于将自身升高到一表面上方使得另一个相同的机器人能够在其下方移动的提升机构。
22.根据权利要求21所述的方法,用于将所述第一机器人堆叠在所述第二机器人的顶部上,所述方法包括所述第二机器人将其自身定位在所述第一机器人的下方。
23.根据权利要求21所述的方法,用于使所述第二机器人移动经过所述第一机器人,其中,所述第二机器人经由所述第一机器人下方的所述空间,从初始位置移动到所述第一机器人的相对侧上的后续位置。
24.根据权利要求21所述的方法,其中,所述第一机器人响应于接收到的信号而相对于所述表面升高自身。
25.根据权利要求24所述的方法,其中,在接收到所述信号之后,所述第一机器人评估相对于所述表面升高自身是否可行,并且在确定这样做可行时,相对于所述表面升高自身。
26.根据权利要求24或25所述的方法,其中,所述第一机器人从所述第二机器人或从控制系统接收所述信号。
27.一种或多种非暂时性存储介质,包括能够由机器人的处理器执行的计算机指令,所述机器人包括用于移动自身的驱动器和用于将自身升高到一表面上方以使得另一个相同的机器人能够在其下方移动的提升机构;所述计算机指令在由所述处理器执行时使所述机器人将自身升高到一表面上方。
技术总结
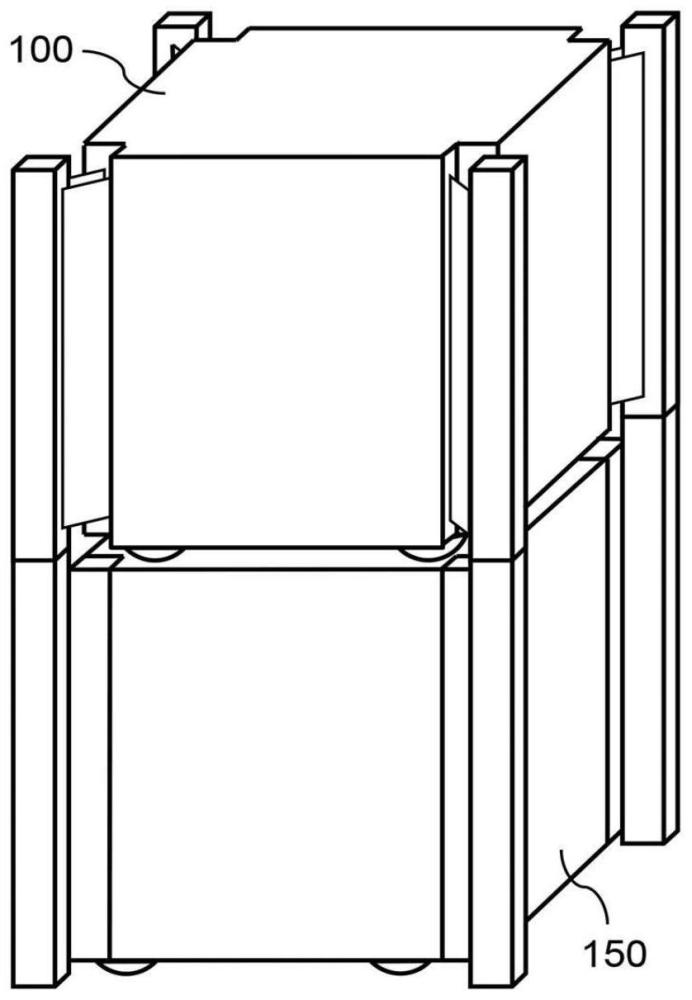
一种机器人(100),包括用于移动机器人(100)的驱动器(120)和提升装置(130),该提升装置用于将机器人(100)升高到一表面上方,使得另一个相同的机器人(150)能够在升高的机器人(100)下方移动。
技术研发人员:M·尤尔特
受保护的技术使用者:株式会社东芝
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!