可编程变桨末端执行器的制作方法
本公开涉及基于机器人技术的处理,并且具体地涉及与可编程变桨末端执行器(programmable pitch changer end effector)相关的装置、系统和方法。背景说明部件的机器人拾取和放置通常涉及将部件从拾取时的一个节距/间隔/角度重新定位到随后的部件放置时的不同节距/间隔/角度。拾取器通常还涉及其它部件供给系统,例如平行引导的输送机或振动直列式轨道。传统的节距改变通常基于螺旋鼓的凸轮或板凸轮,其可以展开和收缩多个托架或类似元件。然而,这种设计在定位灵活性方面受到限制,部分原因是硬工具定位凸轮设计规定了固定的起点和固定的终点位置。由于这种基于凸轮的变桨器需要许多钢制部件,所以这些硬工具设计也更大更重。除了上述缺点之外,这些硬工具的末端执行器还必须针对截齿所需的每个新的节距/间距/角度进行更换。此外,硬工具末端执行器仅容许拾取和放置之间的非常有限的变化。因此,需要一种更轻和更灵活的可编程节距/间距/角度变换器,其有利于变换能力、灵活性和拾取与放置之间的可变性。
背景技术:
0、背景
技术实现思路
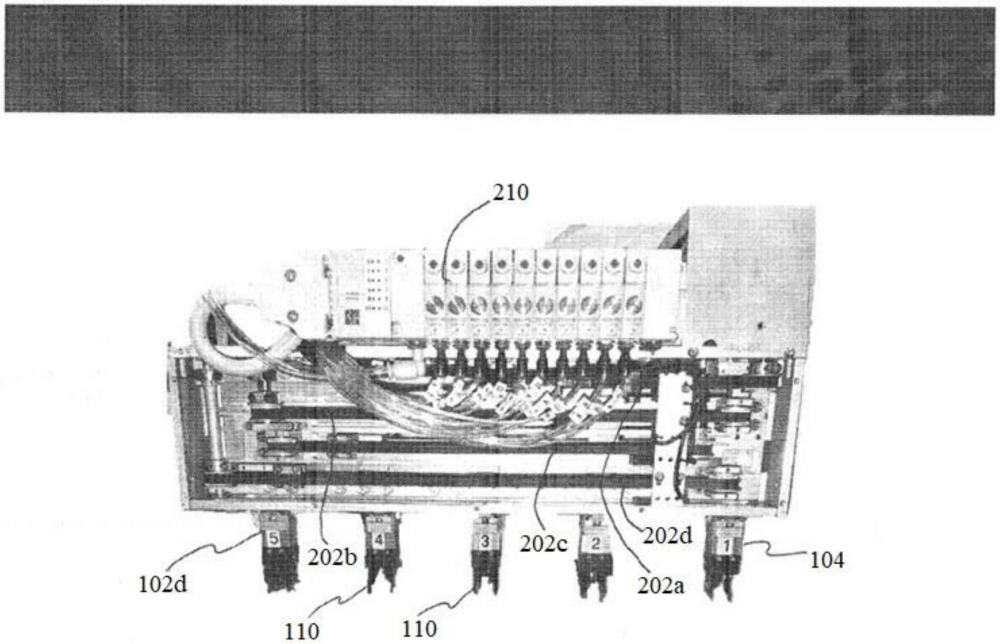
1、实施方式提供了用于可编程变桨末端执行器的装置、系统和方法。实施方式包括:多个模块,其中所述多个模块中的一个模块包括在x轴上位置固定的基座,并且其中所述多个模块中的其它模块包括能够在x轴上线性移动的基座;多个夹具,每个夹具唯一地与远离所述多个模块中的每个模块的基座的所述多个模块中的每个模块相关联,所述多个夹具能够在制造或包装线中夹持物品;z轴致动器,其能够使所述多个夹具中的至少一个夹具沿着z轴移动靠近和远离被夹持的物品;θ轴致动器,其能够使所述多个夹具中的至少一个夹具相对于与所述多个夹具中的一个夹具对应的所述多个模块中的一个模块的相应基座围绕z轴移动;以及线性运动致动器,其能够提供多个模块中的至少一个模块沿x轴的线性运动。
2、因此,实施方式提供了更轻且更灵活的可编程节距/间距/角度变换器,其有利于变换能力、灵活性以及拾取和放置之间的可变性。
技术特征:
1.一种可编程变桨末端执行器,包括:
2.根据权利要求1所述的可编程变桨末端执行器,其中,每个所述z轴致动器唯一地对应于所述多个模块中的一个模块。
3.根据权利要求1所述的可编程变桨末端执行器,其中,每个所述θ轴致动器唯一地对应于所述多个模块中的一个模块。
4.根据权利要求1所述的可编程变桨末端执行器,其中,所述夹具包括真空夹具。
5.根据权利要求1所述的可编程变桨末端执行器,其中,所述夹具包括叉状件和钳状件中的一个。
6.根据权利要求1所述的可编程变桨末端执行器,其中,所述夹具包括扣环。
7.根据权利要求1所述的可编程变桨末端执行器,其中,每个所述线性运动致动器唯一地对应于能够进行所述线性运动的所述基座。
8.根据权利要求7所述的可编程变桨末端执行器,其中,所述线性运动致动器包括驱动带。
9.根据权利要求8所述的可编程变桨末端执行器,其中,所述驱动带由电机驱动。
10.根据权利要求9所述的可编程变桨末端执行器,其中,所述电机是伺服电机。
11.根据权利要求10所述的可编程变桨末端执行器,其中,所述伺服电机被编码。
12.根据权利要求1所述的可编程变桨末端执行器,还包括监测所述线性运动的传感器。
13.根据权利要求1所述的可编程变桨末端执行器,还包括监测所述z轴致动器的致动的传感器。
14.根据权利要求13所述的可编程变桨末端执行器,其中,所述z轴致动器的致动基于所述传感器而被取消。
15.根据权利要求14所述的可编程变桨末端执行器,其中,所述致动由于所述传感器检测到缺陷部件而被取消。
16.根据权利要求1所述的可编程变桨末端执行器,其中,所述线性运动致动器包括驱动链。
17.根据权利要求1所述的可编程变桨末端执行器,其中,所述多个模块包括5个模块。
18.根据权利要求1所述的可编程变桨末端执行器,其中,所述θ轴致动器在用于被夹持物品的拾取功能和放置功能之间修改所述多个夹具中的对应的一个夹具围绕z轴的位置。
19.根据权利要求1所述的可编程变桨末端执行器,其中,所述线性运动致动器在用于被夹持物品的拾取功能和放置功能之间修改所述多个夹具中的对应的一个夹具的位置。
20.根据权利要求1所述的可编程变桨末端执行器,其中,所述θ轴致动器包括至少两个运动止动件。
技术总结
一种用于可编程变桨末端执行器的装置、系统和方法。实施方式包括:多个模块,其中多个模块中的一个模块包括在x轴上位置固定的基座,并且其中多个模块中的其它模块包括能够在x轴上线性移动的基座;多个夹具,每个夹具唯一地与远离多个模块中的每个模块的基座的多个模块中的每个模块相关联,多个夹具能够在制造或包装线中夹持物品;z轴致动器,其能够使多个夹具中的至少一个夹具沿着z轴移动靠近和远离被夹持的物品;θ轴致动器,其能够使多个夹具中的至少一个夹具相对于与多个夹具中的一个夹具对应的多个模块中的一个模块的相应基座围绕z轴移动;以及线性运动致动器,其能够提供多个模块中的至少一个模块沿x轴的线性运动。
技术研发人员:J·鲍斯布姆
受保护的技术使用者:捷普有限公司
技术研发日:
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!