机器人系统的制作方法
本公开涉及机器人系统。
背景技术:
1、在专利文献1中,公开了一种机器人的校准方法,该机器人具备具有6个以上的自由度的臂,使得能够通过对臂的前端部施加力而使其移动,来将前端部定位在任意的位置/姿势。该机器人的校准方法通过以下方式进行校准:在臂的关节部的各轴设置位置检测器,使用能够根据各轴的位置检测器的信号来测量前端部的位置/姿势的三维测量器,将三维测量仪的前端部与位于想要进行校正的多关节机器人的前端部的指尖耦合,对机器人前端部的位置/姿势进行测量,并改变机器人的位置/姿势来测量多个示教点。
2、在先技术文献
3、专利文献
4、专利文献1:日本特开2001-50741号公报
技术实现思路
1、本公开提供更高精度地调整机器人所具有的各关节的姿势的机器人系统。
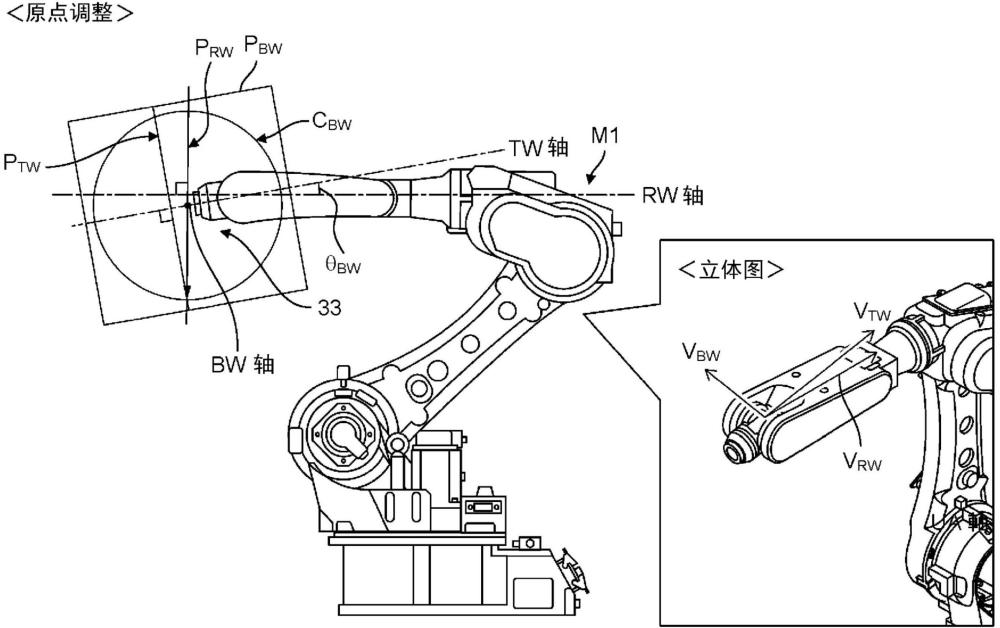
2、本公开提供机器人系统,所述机器人系统具备:机器人,具有多个动作轴;机器人控制装置,分别使所述多个动作轴动作来对所述动作轴的姿势进行调整;加速度传感器,被设置于所述机器人的前端部,对所述前端部的重力加速度进行测定;和终端装置,能够在所述加速度传感器与所述机器人控制装置之间进行通信,所述机器人控制装置使所述多个动作轴各自之中任一个第1动作轴的姿势动作到至少不同的3个以上的姿势,所述终端装置执行以下处理:存储分别在所述3个以上的姿势下由所述加速度传感器检测出的3个以上的第1重力加速度数据;基于所存储的所述3个以上的第1重力加速度数据,算出三维空间中的所述第1动作轴的第1旋转轴向量;基于所算出的所述第1旋转轴向量,算出用于修正所述机器人的姿势偏移的修正参数。
3、根据本公开,能够更高精度地调整机器人所具有的各关节的姿势。
技术特征:
1.一种机器人系统,具备:
2.根据权利要求1所述的机器人系统,其中,
3.根据权利要求1所述的机器人系统,其中,
4.根据权利要求3所述的机器人系统,其中,
5.一种机器人系统,具备:
技术总结
机器人系统具备:机器人,具有多个动作轴;机器人控制装置,分别使多个动作轴动作来对动作轴的姿势进行调整;加速度传感器,被设置于机器人的前端部,对前端部的重力加速度进行测定;和终端装置,能够在加速度传感器与机器人控制装置之间进行通信。机器人控制装置使第1动作轴的姿势动作到至少不同的3个以上的姿势,终端装置存储分别在3个以上的姿势下由加速度传感器检测出的3个以上的第1重力加速度数据,基于3个以上的第1重力加速度数据,算出三维空间中的第1动作轴的第1旋转轴向量,基于所算出的第1旋转轴向量,算出用于修正机器人的姿势偏移的修正参数。
技术研发人员:川村洸太
受保护的技术使用者:松下知识产权经营株式会社
技术研发日:
技术公布日:2025/1/23
- 还没有人留言评论。精彩留言会获得点赞!