一种护栏板安装自动定位调准方法及系统与流程
本发明涉及智慧工地,尤其涉及护栏板安装自动定位调准方法及系统。
背景技术:
1、目前,国内已经有通过机器人对高速公路路侧护栏板进行安装的先例,只需要机器人将护栏板对准预设安装的位置,再通过人工安装螺丝,此举大大节省了搬运护栏板的人工劳动力。
2、然而,现有的自动安装护栏板的机器人对于护栏板的搬运以及对准时常因为各种因素出现一定程度的偏差,导致很多情况下还需要工人的手动校准,方可进行安装螺丝,此举有待做出进一步对于机器人工作的优化。
3、公开于该背景技术部分的信息仅仅旨在加深对本公开总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成本领域技术人员所公知的现有技术。
技术实现思路
1、本发明提供了护栏板安装自动定位调准方法及系统,可有效解决背景技术中的问题。
2、为了达到上述目的,本发明所采用的技术方案是:
3、一种护栏板安装自动定位调准方法,所述方法包括:
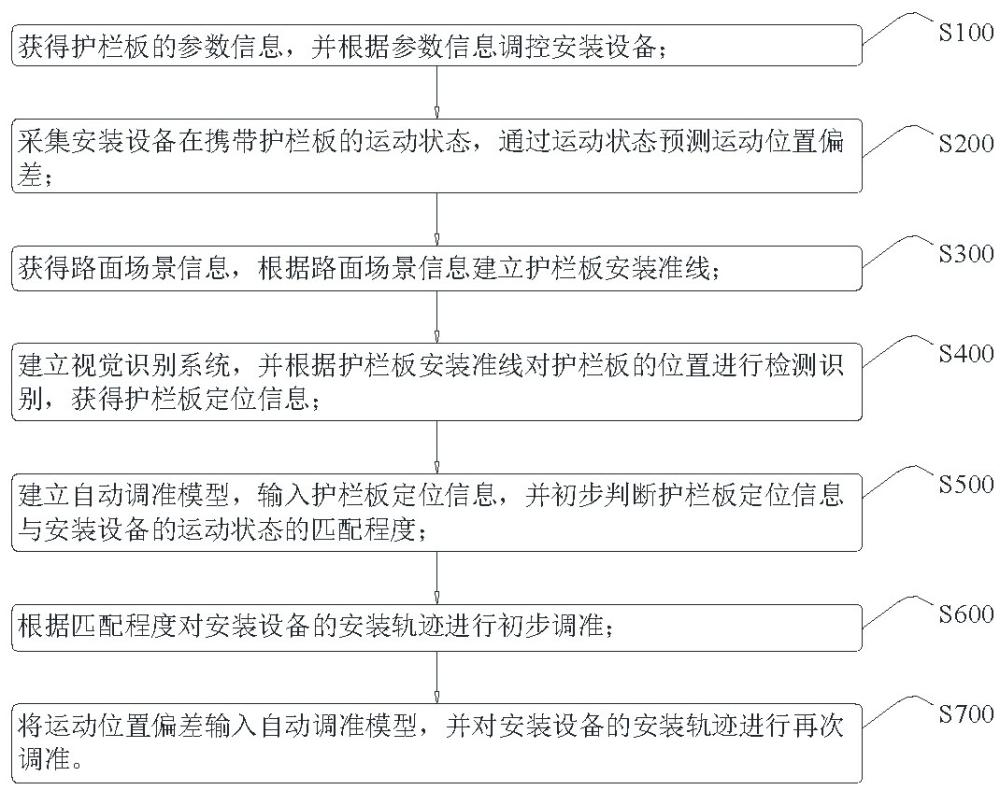
4、获得护栏板的参数信息,并根据所述参数信息调控安装设备;
5、采集所述安装设备在携带所述护栏板的运动状态,通过所述运动状态预测运动定位影响;
6、获得道路地势信息,根据所述道路地势信息建立护栏板安装准线;
7、建立视觉识别系统,并根据所述护栏板安装准线对护栏板的位置进行检测识别,获得护栏板定位信息;
8、建立自动调准模型,输入所述护栏板定位信息,并初步判断所述护栏板定位信息与所述安装设备的运动状态的匹配程度;
9、根据所述匹配程度对所述安装设备的安装轨迹进行初步调准;
10、将所述运动定位影响输入所述自动调准模型,并对所述安装设备的安装轨迹进行再次调准。
11、进一步地,根据所述道路地势信息建立护栏板安装准线,包括:
12、采集路侧坡度信息,坡度方向为路侧安装护栏板的顺延方向;
13、根据所述路侧坡度信息确定所述护栏板两端的安装位置;
14、连接所述护栏板两端的安装位置,建立所述护栏板安装准线。
15、进一步地,根据所述护栏板安装准线对护栏板的位置进行检测识别,获得护栏板定位信息,包括:
16、采集所述护栏板安装区域图像;
17、对所述安装区域图像进行特征识别;
18、基于所述护栏板安装准线,并根据所述特征识别的结果,对所述护栏板的安装位置进行确定,获得护栏板定位信息。
19、进一步地,对所述安装区域图像进行特征识别,包括:
20、将所述安装区域图像转化成能够进行卷积运算的特征矩阵;
21、按照所述护栏板的预设轮廓设置卷积层;
22、通过所述卷积层对所述特征矩阵进行卷积运算,完成对所述安装区域图像的特征识别。
23、进一步地,建立自动调准模型,包括:
24、采集历史安装信息,并对所述历史安装信息中的数据进行清洗;
25、基于机器学习算法,对清洗后的所述数据进行深入学习;
26、提取一定量清洗后的所述数据构建训练集和验证集;
27、通过所述训练集和验证集对深入学习后对调准结果进行检验;
28、基于所述机器学习算法建立所述自动调准模型。
29、进一步地,根据所述匹配程度对所述安装设备的安装轨迹进行初步调准,包括:
30、通过所述自动调准模型对所述护栏板定位信息与所述安装设备设置匹配阈值;
31、判断所述匹配程度是否在所述匹配阈值内;
32、若否,重新对所述安装设备的安装位置进行调整,直至所述匹配程度在所述匹配阈值内,完成对所述安装设备的安装轨迹进行初步调准。
33、进一步地,采集所述安装设备在携带所述护栏板的运动状态,其中,所述运动状态包括所述安装设备的移动偏差和安装抖动。
34、进一步地,将所述运动定位影响输入所述自动调准模型,并对所述安装设备的安装轨迹进行再次调准,包括:
35、根据所述移动偏差和安装抖动对所述匹配阈值进行修正;
36、按照修正后的所述匹配阈值对所述安装设备的安装轨迹进行再次调准。
37、一种护栏板安装自动定位调准系统,所述系统包括:
38、参数信息获取模块,获得护栏板的参数信息,并根据所述参数信息调控安装设备;
39、运动状态采集模块,采集所述安装设备在携带所述护栏板的运动状态,通过所述运动状态预测运动定位影响;
40、地势信息获取模块,获得道路地势信息,根据所述道路地势信息建立护栏板安装准线;
41、视觉识别模块,建立视觉识别系统,并根据所述护栏板安装准线对护栏板的位置进行检测识别,获得护栏板定位信息;
42、调准模型建立模块,建立自动调准模型,输入所述护栏板定位信息,并初步判断所述护栏板定位信息与所述安装设备的运动状态的匹配程度,
43、初步调准模块,根据所述匹配程度对所述安装设备的安装轨迹进行初步调准;
44、再次调准模块,将所述运动定位影响输入所述自动调准模型,并对所述安装设备的安装轨迹进行再次调准。
45、进一步地,所述调准模型建立模块包括:
46、历史数据采集单元,采集历史安装信息,并对所述历史安装信息中的数据进行清洗;
47、深入学习单元,基于机器学习算法,对清洗后的所述数据进行深入学习;
48、构建训练验证集单元,提取一定量清洗后的所述数据构建训练集和验证集;
49、训练验证模型单元,通过所述训练集和验证集对深入学习后对调准结果进行检验,基于所述机器学习算法建立所述自动调准模型。
50、通过本发明的技术方案,可实现以下技术效果:
51、有效解决了自动安装机器人对护栏板定位和对准程度较差的问题,且缩短安装单位护栏板的人工流程,节省人工成本,进一步提高安装效率。
52、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种护栏板安装自动定位调准方法,其特征在于,所述方法包括:
2.根据权利要求1所述的护栏板安装自动定位调准方法,其特征在于,根据所述道路地势信息建立护栏板安装准线,包括:
3.根据权利要求1或2所述的护栏板安装自动定位调准方法,其特征在于,根据所述护栏板安装准线对护栏板的位置进行检测识别,获得护栏板定位信息,包括:
4.根据权利要求3所述的护栏板安装自动定位调准方法,其特征在于,对所述安装区域图像进行特征识别,包括:
5.根据权利要求1所述的护栏板安装自动定位调准方法,其特征在于,建立自动调准模型,包括:
6.根据权利要求1或5所述的护栏板安装自动定位调准方法,其特征在于,根据所述匹配程度对所述安装设备的安装轨迹进行初步调准,包括:
7.根据权利要求6所述的护栏板安装自动定位调准方法,其特征在于,采集所述安装设备在携带所述护栏板的运动状态,其中,所述运动状态包括所述安装设备的移动偏差和安装抖动。
8.根据权利要求7所述的护栏板安装自动定位调准方法,其特征在于,将所述运动定位影响输入所述自动调准模型,并对所述安装设备的安装轨迹进行再次调准,包括:
9.一种护栏板安装自动定位调准系统,其特征在于,所述系统包括:
10.根据权利要求9所述的护栏板安装自动定位调准系统,其特征在于,所述调准模型建立模块包括:
技术总结
本发明涉及智慧工地技术领域,尤其涉及一种护栏板安装自动定位调准方法及系统,方法包括:根据参数信息调控安装设备;采集安装设备在携带护栏板的运动状态,通过运动状态预测运动定位影响;根据道路地势信息建立护栏板安装准线;建立视觉识别系统,并根据护栏板安装准线对护栏板的位置进行检测识别,获得护栏板定位信息;建立自动调准模型,输入护栏板定位信息,并判断护栏板定位信息与安装设备的运动状态的匹配程度;根据匹配程度对安装设备的安装轨迹进行调准;并对安装设备的安装轨迹进行调准。通过本发明有效解决了自动安装机器人对护栏板定位和对准程度较差的问题,且缩短安装单位护栏板的人工流程,节省人工成本,进一步提高安装效率。
技术研发人员:费树岷,王彬彬,姜广,赵磊
受保护的技术使用者:南京东奇智能制造研究院有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!