机器人的程序创建方法与流程
本发明涉及机器人的程序创建方法。
背景技术:
1、专利文献1所记载的机器人具备基座、能够旋转地连接到基座的第一臂、能够旋转地连接到第一臂的第二臂、能够旋转地连接到第二臂的第三臂、旋转驱动第一臂的第一电机、旋转驱动第二臂的第二电机以及对第一电机和第二电机供给电力的电源。为了高效率地驱动机械臂,进行使第一臂和第二臂同时旋转的处理。即,同时进行对第一电机的通电和对第二电机的通电。
2、日本特开2015-116663号公报
3、在专利文献1所记载的机器人中,可能会发生对第一电机的通电量和对第二电机的通电量的合计超过电源的最大输出的状态。在该情况下,存在无法以预先设定的路径和速度驱动机械臂的问题。
技术实现思路
1、本发明的机器人的程序创建方法是具备机械臂的机器人的程序创建方法,所述机械臂具有第一臂、驱动所述第一臂的第一电机、第二臂以及驱动所述第二臂的第二电机,其特征在于,具有:
2、第一工序,获取动作程序,所述动作程序包括驱动所述机械臂以使所述机械臂从第一姿态变更为与所述第一姿态不同的第二姿态;
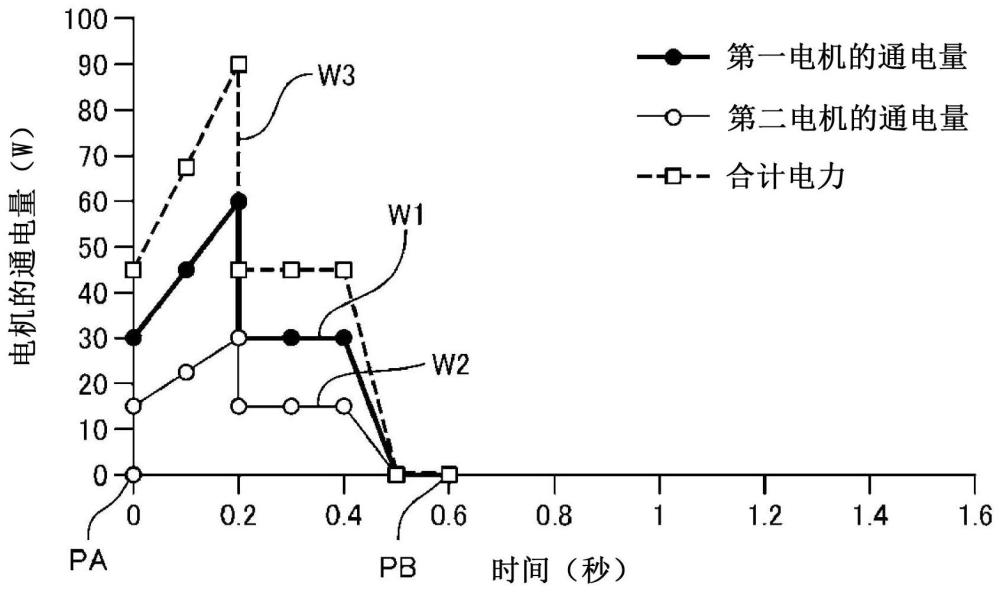
3、第二工序,获取与对所述第一电机的每一单位时间内的通电量w1的历时变化相关的第一信息和与对所述第二电机的每一单位时间内的通电量w2的历时变化相关的第二信息;
4、第三工序,在将通过对所述通电量w1和所述通电量w2求和而得的合计电力设为w3,将所述合计电力的允许值设为w0时,判断从动作开始到动作结束期间是否存在变为w0<w3的状态;以及
5、第四工序,当在所述第三工序中判断为存在变为w0<w3的状态的情况下,创建校正动作程序,通过所述校正动作程序使通电量w1和通电量w2中的任一方的通电量的顶峰的定时提前或延迟以从动作开始到动作结束期间满足w3≤w0。
技术特征:
1.一种机器人的程序创建方法,其特征在于,
2.根据权利要求1所述的机器人的程序创建方法,其中,
3.根据权利要求1所述的机器人的程序创建方法,其中,
4.根据权利要求1所述的机器人的程序创建方法,其中,
5.根据权利要求1所述的机器人的程序创建方法,其中,
技术总结
本发明提供机器人的程序创建方法,通过所述程序创建方法,能够在驱动时驱动机械臂并不使对各电机的通电量的合计电力超过允许值。机器人的程序创建方法具有:第三工序,当将通过对第一电机的每一单位时间内的通电量(W1)和对第二电机的每一单位时间内的通电量(W2)求和而得的合计电力设为W3,将合计电力的允许值设为W0时,判断从动作开始到动作结束期间是否存在变为W0<W3的状态;以及第四工序,当在第三工序中判断为存在变为W0<W3的状态的情况下,创建校正动作程序,通过所述校正动作程序使通电量(W1)和通电量(W2)中的任一方的通电量的顶峰的定时提前或延迟以从动作开始到动作结束期间满足W3≤W0。
技术研发人员:菊池尊行
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/7/25
- 还没有人留言评论。精彩留言会获得点赞!