一种基于人工肌肉驱动的二自由度并联机构仿生眼
本发明属于仿生机器人,具体涉及一种基于人工肌肉驱动的二自由度并联机构仿生眼。
背景技术:
1、眼睛是人类感知外界的重要器官,其结构精巧,功能复杂,是与外界沟通、互动和感知的主要感官之一,是人们获取信息、认识世界的重要途径。随着科技的发展和人类对眼睛研究的深入,仿生眼技术随之诞生,并且成为了生物医学工程、材料科学、机械工程、电子工程等领域的重要研究和应用方向;在机器人技术领域,可通过为机器人搭载仿生眼设备,提升机器人的视觉感知能力,使机器人可以获得和人类一样感知外界的能力。
2、人类眼球周围分布有六根眼外肌,其中眼球的主要运动,水平运动和俯仰运动分别由四根眼直肌控制;所以仿生眼仅需两个自由度即可完成对人类眼球主要运动机理的仿生功能实现;现有仿生眼多采用弹簧、连杆等模拟眼直肌的运动,弹簧及连杆等在实际模拟调节过程中,不仅会产生异响,且异响通过现有手段无法避免,并且由于弹簧及连杆等模拟眼直肌的局限性,导致模拟的眼直肌无法精准调节,导致现有仿生眼在使用过程中噪声较大,运动灵活性不高,且难以实现仿生眼的高精度调节。
3、授权公告号为cn110497389b的中国专利公开了一种绳簧驱动的三自由度并联仿生眼执行机构,其主要包含一个三自由度并联机构和三条绳索驱动支链。三自由度并联机构的三条支链上分别有三个弹簧,可使动平台始终受到绳索拉力相反方向的力,三个驱动杆分别通过绳索带动动平台实现三自由度运动。摄像头安装在动平台上也可实现三自由度运动。本机构具有较少的驱动、紧凑的结构、高速度、高刚度、高精度的优点。该绳簧驱动的三自由度并联仿生眼执行机构采用绳索和弹簧驱动,使用过程中存在噪声大、运动灵活性不高等缺点,且通过弹簧驱动难以实现仿生眼的高精度调节。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种采用人工肌肉驱动,结构紧凑、低噪声、运动灵活性高、调节精度高的基于人工肌肉驱动的二自由度并联机构仿生眼。
2、基于上述目的,本发明通过如下技术方案实现:
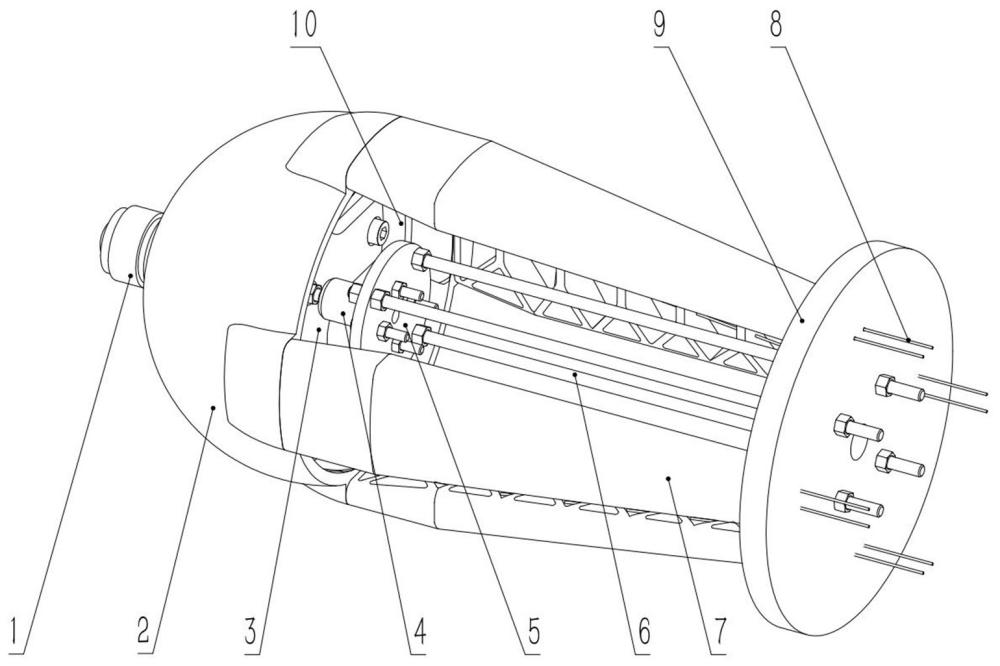
3、一种基于人工肌肉驱动的二自由度并联机构仿生眼,包括二自由度柔性驱动并联机构,二自由度柔性驱动并联机构上设有仿生眼结构,仿生眼结构包括眼球柔性体;二自由度柔性驱动并联机构包括对称设置的与眼球柔性体相连接的直肌柔性体和直肌绳索,直肌柔性体末端设有与直肌绳索相配合的总腱环平台。
4、进一步地,眼球柔性体内套设有眼球壳体,眼球壳体上设有内部凸台,内部凸台与设置在眼球柔性体上的摄像孔相配合;眼球柔性体远离直肌柔性体一侧设有与内部凸台相连接的摄像机;眼球壳体内设有与眼球壳体内壁面间隙配合的眼球支架;眼球柔性体套在眼球壳体表面;眼球支架与眼球壳体间隙配合,通过螺栓固定。
5、进一步地,直肌柔性体一端与眼球柔性体外侧面胶接,另一端与总腱环平台胶接,总腱环平台上设有与直肌柔性体相配合的平台槽;直肌绳索设置在直肌柔性体内;直肌柔性体一端与眼球柔性体胶接,另一端与总腱环平台胶接,同时中间穿过直肌绳索。
6、进一步地,直肌绳索包括两根间隙配合的调节绳索,调节绳索的一端与设置在眼球柔性体内侧侧面上的弧型连接片相连接;弧型连接片为弧形铁片;安装时,弧形铁片紧贴眼球柔性体内侧,绳索依次从预留孔位穿过眼球柔性体、直肌柔性体和总腱环平台,预留孔位与绳索间采用间隙配合。
7、进一步地,调节绳索通过设置在眼球柔性体上的预留孔位与直肌柔性体相配合;直肌柔性体内设有分别与调节绳索间隙配合的穿过孔位。
8、进一步地,总腱环平台上设有与调节绳索间隙配合的平台孔位,平台孔位设置在平台槽内。
9、进一步地,穿过孔位沿直肌柔性体纵向对称设置在直肌柔性体的中间位置上;预留孔位设置在眼球柔性体与直肌柔性体连接处。
10、进一步地,眼球柔性体上对称设置有四根直肌柔性体,相邻直肌柔性体间的夹角为90°;直肌柔性体的内侧侧面上分布有间隙配合的镂空多角形,镂空多角形为六边形镂空和三角形镂空,镂空多角形之间余留筋的厚度为3mm。
11、进一步地,摄像机的摄像头朝向与仿生眼视线方向重合;人工肌肉由眼球柔性体、直肌柔性体和直肌绳索组成。
12、进一步地,仿生眼结构还包括设置在眼球支架上的球铰支架;球铰支架的一侧侧面上设有与眼球支架球铰连接的球铰,球铰与设置在眼球支架中心的球铰孔相连接,另一侧侧面上设有与直肌柔性体一一对应的螺杆,螺杆远离球铰支架的一端与总腱环平台相连接;螺杆为5m螺杆;仿生眼结构由眼球支架与球铰连接,通过螺母进行固定,球铰通过螺栓安装在球铰支架上;调节绳索上套设有多个与穿过孔位相配合的调节滚珠,调节滚珠上套设有与穿过孔位相配合的调节滚环;镂空多角形内设有微型弹簧,微型弹簧的两端与镂空多角形的内壁面相连接。
13、与现有技术相比,本发明的有益效果如下:
14、(1)本发明通过使用球铰连接的仿生眼结构,配合二自由度柔性驱动并联机构中直肌柔性体的四根人工肌肉,使得仿生眼具备偏航和俯仰两种运动姿态,从而通过符合人类眼球的生理结构和主要运动形式,通过直肌绳索对直肌柔性体的无极调节,能够实现仿生眼的二自由度精准调节;直肌柔性体在调节过程中能够完美模拟眼直肌的运动调节,能够实现仿生眼的高运动灵活性及低噪声调节的目的。
15、(2)本发明采用硅胶浇铸模具的方式制作人工肌肉中直肌柔性体和眼球柔性体的柔体部分,直肌柔性体能够较为完美的模仿人类眼球眼外肌的上直肌、下直肌、内直肌和外直肌,方便实现仿生眼的无声调节,直肌柔性体通过在内侧面上涉及中间镂空的镂空多角形,不仅便于直肌柔性体进行无极伸缩,实现仿生眼的高精度调节,还能够大幅度增加仿生眼的使用寿命,减少使用过程中异响噪声的产生。
16、(3)本发明采用总腱环平台模仿人类眼球结构中的总腱环,用于控制眼外肌进行伸缩运动,方便本仿生眼实现二自由度调节;本发明仿照人类眼球结构,采用二自由度人工肌肉柔性并联驱动,具有结构紧凑、低噪声、运动灵活性高等特点。
17、(5)本发明包括仿生眼结构和二自由度柔性驱动并联机构;仿生眼结构由摄像机、眼球柔性体、眼球壳体和眼球支架组成;二自由度柔性驱动并联机构主要由总腱环平台、直肌柔性体和直肌绳索组成,眼肌柔性体通过直肌绳索与直肌柔性体相连,总腱环平台通过螺杆连接球铰支架,球铰支架上通过安装球铰连接动平台;本发明通过直肌柔性体、直肌绳索与球铰之间相互配合,通过拉伸直肌绳索,控制直肌柔性体进行伸缩运动以模仿人类的眼球运动时眼外肌的伸缩,同时通过上、下、左、右四根直肌柔性体的伸缩实现仿生眼的二自由度运动调节能力。
技术特征:
1.一种基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,包括二自由度柔性驱动并联机构,二自由度柔性驱动并联机构上设有仿生眼结构,仿生眼结构包括眼球柔性体;所述二自由度柔性驱动并联机构包括对称设置的与眼球柔性体相连接的直肌柔性体和直肌绳索,直肌柔性体末端设有与直肌绳索相配合的总腱环平台。
2.根据权利要求1所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述眼球柔性体内套设有眼球壳体,眼球壳体上设有内部凸台,内部凸台与设置在眼球柔性体上的摄像孔相配合;所述眼球柔性体远离直肌柔性体一侧设有与内部凸台相连接的摄像机;所述眼球壳体内设有与眼球壳体内壁面间隙配合的眼球支架。
3.根据权利要求2所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述直肌柔性体一端与眼球柔性体外侧面胶接,另一端与总腱环平台胶接,总腱环平台上设有与直肌柔性体相配合的平台槽;所述直肌绳索设置在直肌柔性体内。
4.根据权利要求3所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述直肌绳索包括两根间隙配合的调节绳索,调节绳索的一端与设置在眼球柔性体内侧侧面上的弧型连接片相连接。
5.根据权利要求4所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述调节绳索通过设置在眼球柔性体上的预留孔位与直肌柔性体相配合;所述直肌柔性体内设有分别与调节绳索间隙配合的穿过孔位。
6.根据权利要求5所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述总腱环平台上设有与调节绳索间隙配合的平台孔位,平台孔位设置在平台槽内。
7.根据权利要求6所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述穿过孔位沿直肌柔性体纵向对称设置在直肌柔性体的中间位置上;所述预留孔位设置在眼球柔性体与直肌柔性体连接处。
8.根据权利要求1或6所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述眼球柔性体上对称设置有四根直肌柔性体,相邻直肌柔性体间的夹角为90°;所述直肌柔性体的内侧侧面上分布有间隙配合的镂空多角形。
9.根据权利要求1或6所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述摄像机的摄像头朝向与仿生眼视线方向重合。
10.根据权利要求2或6所述的基于人工肌肉驱动的二自由度并联机构仿生眼,其特征在于,所述仿生眼结构还包括设置在眼球支架上的球铰支架;所述球铰支架的一侧侧面上设有与眼球支架球铰连接的球铰,另一侧侧面上设有与直肌柔性体一一对应的螺杆,螺杆远离球铰支架的一端与总腱环平台相连接。
技术总结
本发明属于仿生机器人技术领域,具体公开了一种基于人工肌肉驱动的二自由度并联机构仿生眼,包括二自由度柔性驱动并联机构,二自由度柔性驱动并联机构上设有仿生眼结构,仿生眼结构包括眼球柔性体;二自由度柔性驱动并联机构包括对称设置的与眼球柔性体相连接的直肌柔性体和直肌绳索,直肌柔性体末端设有与直肌绳索相配合的总腱环平台。本发明通过使用球铰连接的仿生眼结构,配合二自由度柔性驱动并联机构中直肌柔性体的四根人工肌肉,使得仿生眼具备偏航和俯仰两种运动姿态,从而通过符合人类眼球的生理结构和主要运动形式,通过直肌绳索对直肌柔性体的无极调节,能够实现仿生眼的二自由度精准调节。
技术研发人员:李恒宇,候凯迪,谢永浩,刘军,刘靖逸,谢少荣,罗均
受保护的技术使用者:上海大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!