力控高刚性机器人关节的制作方法
本发明涉及机器人,特别是涉及一种力控高刚性机器人关节。
背景技术:
1、协作机器人关节通常采用伺服电机和谐波减速机的方案来驱动,实现高转矩输出,通过采集电机电流或者扭矩传感器实现力控相关特性。随着协作机器人越来越多的使用在工业场景,对于机器人所使用关节的力控特性和刚性都提出了更高的要求。现有的关节刚性弱,容易产生抖动,无法满足更高要求的工业场景,而具备高刚性减速机的关节又难以集成扭矩传感器,无法满足高力控的场景需求。
2、当前的机器人关节存在以下不足:
3、1.谐波减速机刚性弱,抗冲击特性差,扭矩传感器与之连接后关节整体刚性更弱;
4、2.扭矩传感器位于输出端,其线缆需要穿过整个关节连接到后端的控制电路板,在关节转动时增加破损和干扰风险;
5、3.关节中空走线空间小,无法满足线束和气管布置。
技术实现思路
1、本发明要解决的技术问题是提供一种力控高刚性机器人关节,采用扭矩传感器和摆线减速机,满足力控特性和高刚性需求,适应工业场景。
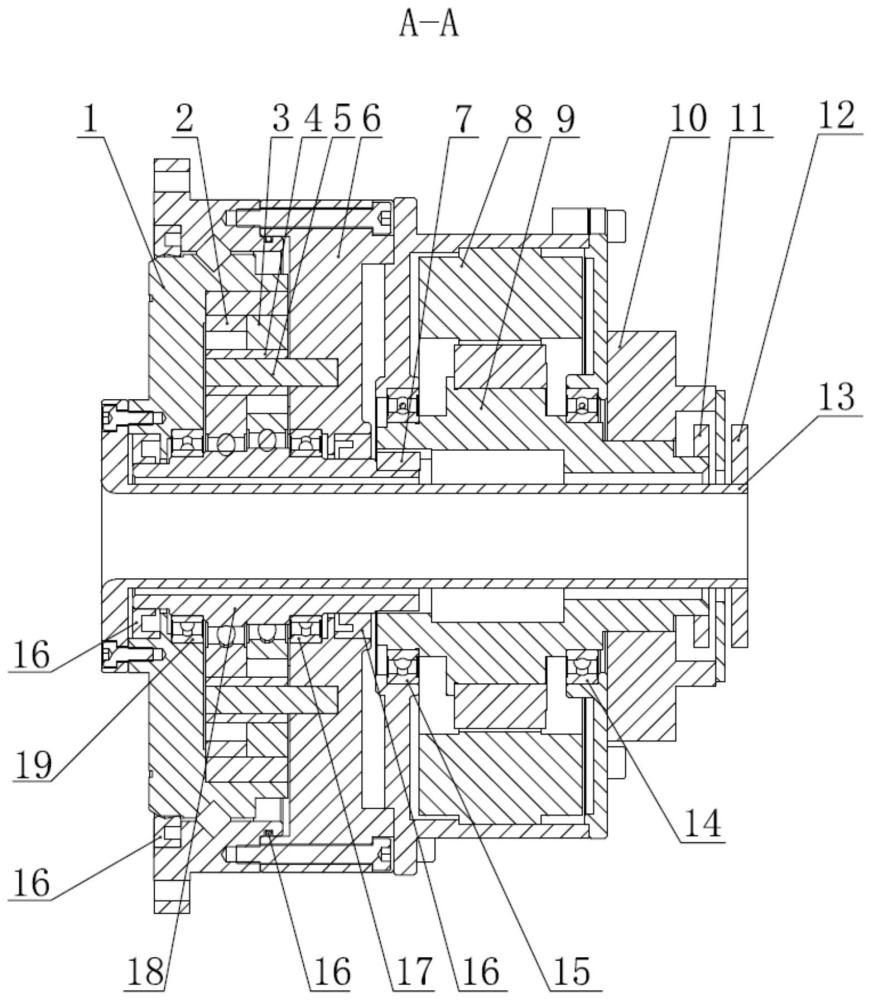
2、本发明力控高刚性机器人关节,包括减速机模块、扭矩传感器和电机模块,减速机模块包括交叉滚子轴承,交叉滚子轴承的外圈与扭矩传感器固定连接,交叉滚子轴承的内圈输出端连接有中空套筒,交叉滚子轴承的内圈啮合有一组摆线轮,摆线轮随偏心轴转动,摆线轮的端面上设置的销轴插入扭矩传感器中,电机模块设置在扭矩传感器的一侧,电机模块的电机轴和偏心轴均设置在中空套筒外侧,且电机轴带动偏心轴转动。
3、本发明力控高刚性机器人关节,其中所述交叉滚子轴承的内圈上加工有针齿,通过针齿与摆线轮啮合。
4、本发明力控高刚性机器人关节,其中所述偏心轴一端活动安装在交叉滚子轴承的内圈上,另一端活动安装在扭矩传感器上。
5、本发明力控高刚性机器人关节,其中所述摆线轮的端面上沿周向均匀开设有多个通孔,通孔内安装有销套,销轴安装在销套内侧。
6、本发明力控高刚性机器人关节,其中所述电机模块包括电机,电机带动电机轴转动。
7、本发明力控高刚性机器人关节,其中所述减速机模块和电机模块连接,电机轴与偏心轴通过平键连接。
8、本发明力控高刚性机器人关节,其中所述电机轴的一端设置有制动器。
9、本发明力控高刚性机器人关节,其中所述电机轴上安装有输入端编码器,中空套筒上安装有输出端编码器。
10、本发明力控高刚性机器人关节,其中所述交叉滚子轴承外圈与中空套筒的连接处、交叉滚子轴承外圈与交叉滚子轴承内圈的连接处、交叉滚子轴承外圈与扭矩传感器的连接处和扭矩传感器与偏心轴的连接处均设置有密封圈。
11、本发明力控高刚性机器人关节与现有技术不同之处在于,本发明力控高刚性机器人关节采用摆线减速机,相比于谐波减速机刚性强,精度高。减速机模块采用交叉滚子轴承进行支撑,轴向空间小。扭矩传感器与减速机集成,模块化且位于静端,线束无相对转动,接线简单可靠,避免了装配操作不便,连接不牢靠,容易受干扰等不利因素。中空套筒内孔大,有利于线束及气管的布置。
12、下面结合附图对本发明的力控高刚性机器人关节作进一步说明。
技术特征:
1.一种力控高刚性机器人关节,其特征在于:包括减速机模块、扭矩传感器和电机模块,减速机模块包括交叉滚子轴承,交叉滚子轴承的外圈与扭矩传感器固定连接,交叉滚子轴承的内圈输出端连接有中空套筒,交叉滚子轴承的内圈啮合有一组摆线轮,摆线轮随偏心轴转动,摆线轮的端面上设置的销轴插入扭矩传感器中,电机模块设置在扭矩传感器的一侧,电机模块的电机轴和偏心轴均设置在中空套筒外侧,且电机轴带动偏心轴转动。
2.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述交叉滚子轴承的内圈上加工有针齿,通过针齿与摆线轮啮合。
3.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述偏心轴一端活动安装在交叉滚子轴承的内圈上,另一端活动安装在扭矩传感器上。
4.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述摆线轮的端面上沿周向均匀开设有多个通孔,通孔内安装有销套,销轴安装在销套内侧。
5.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述电机模块包括电机,电机带动电机轴转动。
6.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述减速机模块和电机模块连接,电机轴与偏心轴通过平键连接。
7.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述电机轴的一端设置有制动器。
8.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述电机轴上安装有输入端编码器,中空套筒上安装有输出端编码器。
9.根据权利要求1所述的力控高刚性机器人关节,其特征在于:所述交叉滚子轴承外圈与中空套筒的连接处、交叉滚子轴承外圈与交叉滚子轴承内圈的连接处、交叉滚子轴承外圈与扭矩传感器的连接处和扭矩传感器与偏心轴的连接处均设置有密封圈。
技术总结
本发明力控高刚性机器人关节涉及一种用于协作机器人的关节。其目的是为了提供一种能够满足力控特性和高刚性需求,适应工业场景的力控高刚性机器人关节。本发明力控高刚性机器人关节包括减速机模块、扭矩传感器和电机模块,减速机模块包括交叉滚子轴承,交叉滚子轴承的外圈与扭矩传感器固定连接,交叉滚子轴承的内圈输出端连接有中空套筒,交叉滚子轴承的内圈啮合有一组摆线轮,摆线轮随偏心轴转动,摆线轮的端面上设置的销轴插入扭矩传感器中,电机模块设置在扭矩传感器的一侧,电机模块的电机轴和偏心轴均设置在中空套筒外侧,且电机轴带动偏心轴转动。
技术研发人员:周旭东,于文进,李振国,应高阳,杨智恺,赵伟良
受保护的技术使用者:珞石(北京)机器人有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!