一种复合机器人的制作方法
本发明涉及机器人,具体涉及一种复合机器人。
背景技术:
1、在工业生产过程中,机器人的使用大大提高了加工效率,减少了人力资源的浪费,同时也提高了在生产过程中的加工精准性,现有在工业生产中使用的机器人有机器人手臂、机器人运输车等用于辅助工业加工;
2、中国专利公开了一种复合机器人(授权公告号cn 116175517 a),该专利技术包括机器手臂、agv车架,agv车架的底部安装有自驱动轮,agv车架的顶部安装有载物平台,载物平台安装有高台座,且机器手臂安装在高台座上,高台座的外侧安装有ccd相机,agv车架底部安装有移动机构,移动机构上设置有运料板,且运料板呈倾斜分布,载物平台上开设有进料口,且进料口与运料板相互对应;进料口的两侧分别设有进料校准组件,载物平台内部设有工件移动件,此复合机器人,通过采用agv车、机器手臂和ccd视觉器组合成一个整体,实现运输转运、抓取以及视觉判断为复合一体,更适用于工业加工中零部件的多方位多角度的运输转移,方便现有工业加工过程中零部件的转移,提高加工速率;
3、但是,该装置在机器人更换夹具时,需要往返车间,增加了更换所需时间,降低了工作效率,同时若夹具置于外界,可能会导致夹具的丢失。因此,本领域技术人员提供了一种复合机器人,以解决上述背景技术中提出的问题。
技术实现思路
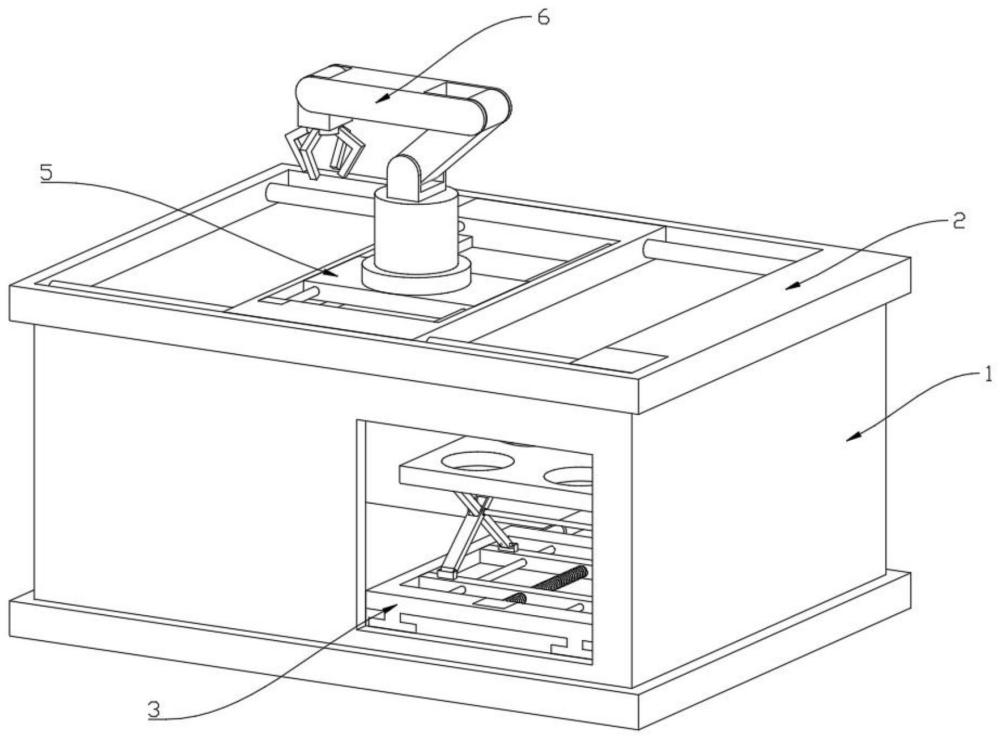
1、为解决上述技术问题,本发明提供一种复合机器人,包括移动结构,移动结构包括移动板,移动板的下表面设有两个t板,在移动板的下方设有底板,在底板内部设有t槽,在移动板的内部设有移动槽,在移动槽内部设有两个限位杆,在两个限位杆之间设有电机二,在电机二上设有双向螺杆,双向螺杆上设有两段螺纹,两段螺纹方向相反。
2、优选地:在所述移动板的后侧设有推杆,在推杆的后侧设有液泵,该结构可以改变移动板的位置。
3、优选地:在所述双向螺杆和限位杆上设有两个移动条板,在每个移动条板的中间设有螺孔,在螺孔的两侧设有穿孔。
4、优选地:在所述移动条板的上方的两端设有连接块,在每个连接块内设有连接轴,该结构可以实现移动条板控制升降板。
5、优选地:在其中两个所述连接轴的上方设有斜杆一,斜杆一的一端设有连接孔一,在斜杆一的中间设有转孔,该结构可以通过转动斜杆完成升降板的升降。
6、优选地:在所述转孔内部设有斜杆二,在斜杆一和斜杆二的中间位置均设有圆孔,在圆孔内设有连接杆,连接杆上设有限位板,该结构可以提高斜杆一和斜杆二之间的稳定性。
7、优选地:在所述斜杆一和斜杆二的顶部设有升降板,升降板的上表面设有若干放置孔,在升降板的下表面设有四个转块,在每个转块的内部设有转轴。
8、优选地:在所述移动结构的外侧设有工作台,在工作台的顶部设有工作板,工作板的中间设有平移槽,平移槽内部设有电机一,电机一上设有螺纹杆,在平移槽的一侧设有滑杆,该结构可以提高平移板的稳定性。
9、优选地:在所述螺纹杆和滑杆上设有平移结构,平移结构包括平移板,平移板和螺纹杆及滑杆接触的位置设有通孔,在平移板的上方设有凹槽。
10、优选地:在所述凹槽内部设有电机三,在电机三上设有螺杆,在凹槽内部一侧设有横杆,在横杆和螺杆的上方设有支撑板,在支撑板内部设有移动孔,在支撑板的上方设有本体,该结构可以使本体完成多方位移动。
11、本发明的技术效果和优点:
12、本发明在结构设计上,通过在工作台内部设置移动结构,利用液泵实现移动板的移动,并且利用电机二和双向螺杆的转动实现两个移动条板的相向移动,从而使升降板可以移动,在放置孔内部放置夹爪可以避免更换夹爪使需要频繁往返车间,同时也避免了夹爪置于外界造成丢失。
技术特征:
1.一种复合机器人,包括移动结构(3),其特征在于,移动结构(3)包括移动板(32),移动板(32)的下表面设有两个t板(321),在移动板(32)的下方设有底板(31),在底板(31)内部设有t槽(311),在移动板(32)的内部设有移动槽(322),在移动槽(322)内部设有两个限位杆(323),在两个限位杆(323)之间设有电机二(324),在电机二(324)上设有双向螺杆(325),双向螺杆(325)上设有两段螺纹,两段螺纹方向相反。
2.根据权利要求1所述的一种复合机器人,其特征在于,在所述移动板(32)的后侧设有推杆(331),在推杆(331)的后侧设有液泵(33)。
3.根据权利要求1所述的一种复合机器人,其特征在于,在所述双向螺杆(325)和限位杆(323)上设有两个移动条板(34),在每个移动条板(34)的中间设有螺孔(341),在螺孔(341)的两侧设有穿孔(342)。
4.根据权利要求3所述的一种复合机器人,其特征在于,在所述移动条板(34)的上方的两端设有连接块(343),在每个连接块(343)内设有连接轴(344)。
5.根据权利要求4所述的一种复合机器人,其特征在于,在其中两个所述连接轴(344)的上方设有斜杆一(35),斜杆一(35)的一端设有连接孔一(351),在斜杆一(35)的中间设有转孔(352)。
6.根据权利要求5所述的一种复合机器人,其特征在于,在所述转孔(352)内部设有斜杆二(36),在斜杆一(35)和斜杆二(36)的中间位置均设有圆孔,在圆孔内设有连接杆(37),连接杆(37)上设有限位板(371)。
7.根据权利要求6所述的一种复合机器人,其特征在于,在所述斜杆一(35)和斜杆二(36)的顶部设有升降板(38),升降板(38)的上表面设有若干放置孔(381),在升降板(38)的下表面设有四个转块(382),在每个转块(382)的内部设有转轴(383)。
8.根据权利要求1所述的一种复合机器人,其特征在于,在所述移动结构(3)的外侧设有工作台(1),在工作台(1)的顶部设有工作板(2),工作板(2)的中间设有平移槽(21),平移槽(21)内部设有电机一(22),电机一(22)上设有螺纹杆(23),在平移槽(21)的一侧设有滑杆(24)。
9.根据权利要求7所述的一种复合机器人,其特征在于,在所述螺纹杆(23)和滑杆(24)上设有平移结构(5),平移结构(5)包括平移板(51),平移板(51)和螺纹杆(23)及滑杆(24)接触的位置设有通孔(52),在平移板(51)的上方设有凹槽(53)。
10.根据权利要求9所述的一种复合机器人,其特征在于,在所述凹槽(53)内部设有电机三(55),在电机三(55)上设有螺杆(54),在凹槽(53)内部一侧设有横杆(56),在横杆(56)和螺杆(54)的上方设有支撑板(57),在支撑板(57)内部设有移动孔(571),在支撑板(57)的上方设有本体(6)。
技术总结
本发明涉及机器人技术领域,具体涉及一种复合机器人,包括移动结构,移动结构包括移动板,移动板的下表面设有两个T板,在移动板的下方设有底板,在底板内部设有T槽,在移动板的内部设有移动槽,在移动槽内部设有两个限位杆,在两个限位杆之间设有电机二,在电机二上设有双向螺杆,双向螺杆上设有两段螺纹,两段螺纹方向相反,本发明在结构设计上,通过在工作台内部设置移动结构,利用液泵实现移动板的移动,并且利用电机二和双向螺杆的转动实现两个移动条板的相向移动,从而使升降板可以移动,在放置孔内部放置夹爪可以避免更换夹爪使需要频繁往返车间,同时也避免了夹爪置于外界造成丢失。
技术研发人员:蒙洋,牟宏磊,王烁石
受保护的技术使用者:创客天下(北京)科技发展有限公司
技术研发日:
技术公布日:2024/7/9
- 还没有人留言评论。精彩留言会获得点赞!