自动抓取压机的制作方法
本发明属于自动抓取压机,具体涉及自动抓取压机。
背景技术:
1、自动抓取压机是通过气缸伸出缩回实现对产品的抓取。可以自动适应各种产品,节省人工,提高效率,机器人稳定性重复精度高配合夹爪极大提高产品稳定合格,自动抓取压机在使用时,为了能够适用于不同产品的抓取工作,则需要根据使用需求进行更换不同的抓取机构,但是现有的自动抓取压机与抓取机构之间是通过多个螺钉拧合固定连接,并且在结构上,传统使用标准气爪和标准电爪,兼容产品的范围,受限于标准气爪电爪行程,无法兼容更多产品,且成本高,因此导致在拆装更换时较为麻烦,为此我们提出一种自动抓取压机。
技术实现思路
1、本发明的目的在于提供自动抓取压机,以解决上述背景技术中提出的该自动抓取压机在进行更换抓取机构时较为麻烦的问题。
2、为实现上述目的,本发明提供如下技术方案:自动抓取压机,包括机械臂,所述机械臂的端部设置有夹取机构,所述夹取机构的一端等距离固定有抓取爪,所述夹取机构与机械臂之间设置有快速拆装机构,所述抓取爪的内侧设置有夹持防滑机构,所述快速拆装机构包括:
3、连接组件,该连接组件设置在夹取机构与机械臂之间的连接处;
4、导向组件,该导向组件设置在连接组件的内部;
5、限位组件,该限位组件设置在导向组件的内部一侧;
6、滑动组件,该滑动组件设置在限位组件的内侧;
7、定位组件,该定位组件设置在夹取机构的侧面与连接组件连接。
8、优选的,所述连接组件包括开设在夹取机构另一端的连接槽以及固定在机械臂端部的连接块,所述连接块与连接槽卡合连接。
9、优选的,所述导向组件包括对称开设在连接块端部的导向槽以及对称固定在连接槽内部的导向块,所述导向块与导向槽卡合连接。
10、优选的,所述限位组件包括开设在导向槽内壁一侧的限位槽以及开设在导向块一侧的内置槽,所述内置槽的内部设置有限位扣,所述限位扣与限位槽卡合连接,所述限位扣与内置槽之间连接有伸缩弹簧。
11、优选的,所述滑动组件包括对称开设在内置槽内壁两侧的滑槽以及对称固定在限位扣两侧的滑块,所述滑块与滑槽滑动连接。
12、优选的,所述定位组件包括对称开设在连接块两侧的定位孔以及对称贯穿开设在连接槽内壁两侧的贯穿孔,所述夹取机构的两侧设置有贯穿过贯穿孔内部与定位孔连接的定位螺杆,所述定位螺杆与定位孔拧合固定连接。
13、优选的,所述夹持防滑机构包括设置在抓取爪端部的橡胶垫以及对称开设在抓取爪端部的对接槽,所述橡胶垫的底端对称固定有对接块,所述对接块与对接槽卡合连接。
14、优选的,所述对接块的两侧对称开设有卡槽以及对称固定在对接槽内壁两侧的卡块,所述卡块与卡槽卡合连接。
15、与现有技术相比,本发明的有益效果是:
16、本发明通过设计的连接槽、连接块、导向槽与导向块,能够实现让夹取机构与机械臂准确的连接,同时配合设计的限位槽、限位扣、定位孔与定位螺杆,可以对连接块进行牢固的定位,相比较现有的技术,大大方便了夹取机构的拆装更换工作,并且该自动抓取压机采用普通气缸作为动力源,并配合滑块曲柄结构形成一个夹爪,这个结构的话成本大幅度压缩,而且产品型号兼容更加多样性,后续增加型号的话,通过调整滑块曲柄就可以实现更多产品的兼容。
技术特征:
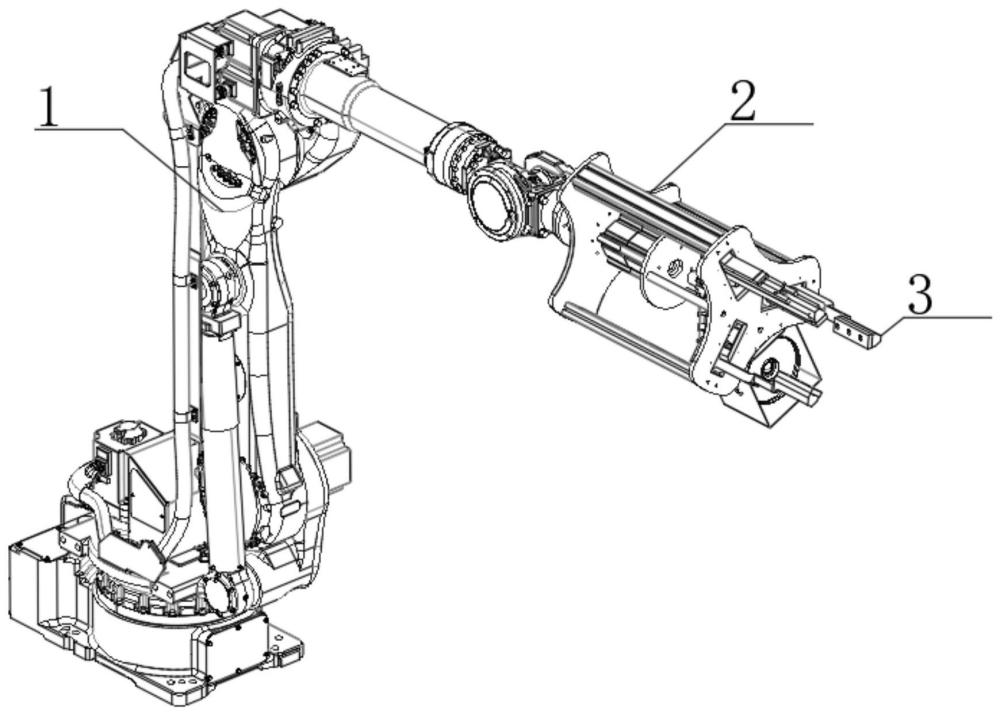
1.自动抓取压机,包括机械臂(1),所述机械臂(1)的端部设置有夹取机构(2),所述夹取机构(2)的一端等距离固定有抓取爪(3),其特征在于:所述夹取机构(2)与机械臂(1)之间设置有快速拆装机构,所述抓取爪(3)的内侧设置有夹持防滑机构,所述快速拆装机构包括:
2.根据权利要求1所述的自动抓取压机,其特征在于:所述连接组件包括开设在夹取机构(2)另一端的连接槽(100)以及固定在机械臂(1)端部的连接块(101),所述连接块(101)与连接槽(100)卡合连接。
3.根据权利要求1所述的自动抓取压机,其特征在于:所述导向组件包括对称开设在连接块(101)端部的导向槽(200)以及对称固定在连接槽(100)内部的导向块(201),所述导向块(201)与导向槽(200)卡合连接。
4.根据权利要求1所述的自动抓取压机,其特征在于:所述限位组件包括开设在导向槽(200)内壁一侧的限位槽(300)以及开设在导向块(201)一侧的内置槽(301),所述内置槽(301)的内部设置有限位扣(302),所述限位扣(302)与限位槽(300)卡合连接,所述限位扣(302)与内置槽(301)之间连接有伸缩弹簧(303)。
5.根据权利要求1所述的自动抓取压机,其特征在于:所述滑动组件包括对称开设在内置槽(301)内壁两侧的滑槽(400)以及对称固定在限位扣(302)两侧的滑块(401),所述滑块(401)与滑槽(400)滑动连接。
6.根据权利要求1所述的自动抓取压机,其特征在于:所述定位组件包括对称开设在连接块(101)两侧的定位孔(500)以及对称贯穿开设在连接槽(100)内壁两侧的贯穿孔(501),所述夹取机构(2)的两侧设置有贯穿过贯穿孔(501)内部与定位孔(500)连接的定位螺杆(502),所述定位螺杆(502)与定位孔(500)拧合固定连接。
7.根据权利要求1所述的自动抓取压机,其特征在于:所述夹持防滑机构包括设置在抓取爪(3)端部的橡胶垫(600)以及对称开设在抓取爪(3)端部的对接槽(601),所述橡胶垫(600)的底端对称固定有对接块(602),所述对接块(602)与对接槽(601)卡合连接。
8.根据权利要求7所述的自动抓取压机,其特征在于:所述对接块(602)的两侧对称开设有卡槽(700)以及对称固定在对接槽(601)内壁两侧的卡块(701),所述卡块(701)与卡槽(700)卡合连接。
技术总结
本发明公开了自动抓取压机,包括机械臂,所述机械臂的端部设置有夹取机构,所述夹取机构的一端等距离固定有抓取爪,所述夹取机构与机械臂之间设置有快速拆装机构;本发明通过设计的连接槽、连接块、导向槽与导向块,能够实现让夹取机构与机械臂准确的连接,同时配合设计的限位槽、限位扣、定位孔与定位螺杆,可以对连接块进行牢固的定位,相比较现有的技术,大大方便了夹取机构的拆装更换工作,并且该自动抓取压机采用普通气缸作为动力源,并配合滑块曲柄结构形成一个夹爪,这个结构的话成本大幅度压缩,而且产品型号兼容更加多样性,后续增加型号的话,通过调整滑块曲柄就可以实现更多产品的兼容。
技术研发人员:张晓兰,赵飞,王汝元
受保护的技术使用者:青岛欧开智能系统有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!