顺从装置及机器人的制作方法
本发明涉及机器人,尤其涉及一种顺从装置及机器人。
背景技术:
1、现有技术中,机器臂末端与机器人夹爪的连接基本上是用硬连接,也就是夹爪直接用螺栓固定在机械臂末端上。在机械臂抓取、搬运等实际应用中,由于机械臂、夹爪、动作对象本身存在的误差、以及视觉识别的偏差,会造成夹爪抓取、搬运等动作时有偏移现象或者直接抓取、搬运失败,影响整个动作流程的顺利执行。为了解决这个技术问题,部分方案中在机械臂和夹爪之间增加顺从装置的软连接,可以在一定范围内吸收机械臂、夹爪和动作对象的偏差,使得整个动作流程可以顺利执行,现有顺从装置一般设置有弹性件用于浮动组件的复位,在对浮动组件进行锁紧的过程中,驱动组件需要先克服弹性力的作用才能对浮动组件进行锁紧,影响顺从装置的反应速度,也使得驱动组件需要较高的功率,增加了驱动组件的重量。
技术实现思路
1、本发明旨在至少解决相关技术中存在的技术问题之一。为此,本发明提出一种顺从装置,旨在提高顺从装置的反应速度,降低驱动组件的功率,减轻整体重量。
2、本发明第二方面的实施例,提供一种机器人。
3、根据本发明第一方面实施例的顺从装置,包括:
4、安装部件,安装有阻挡组件;
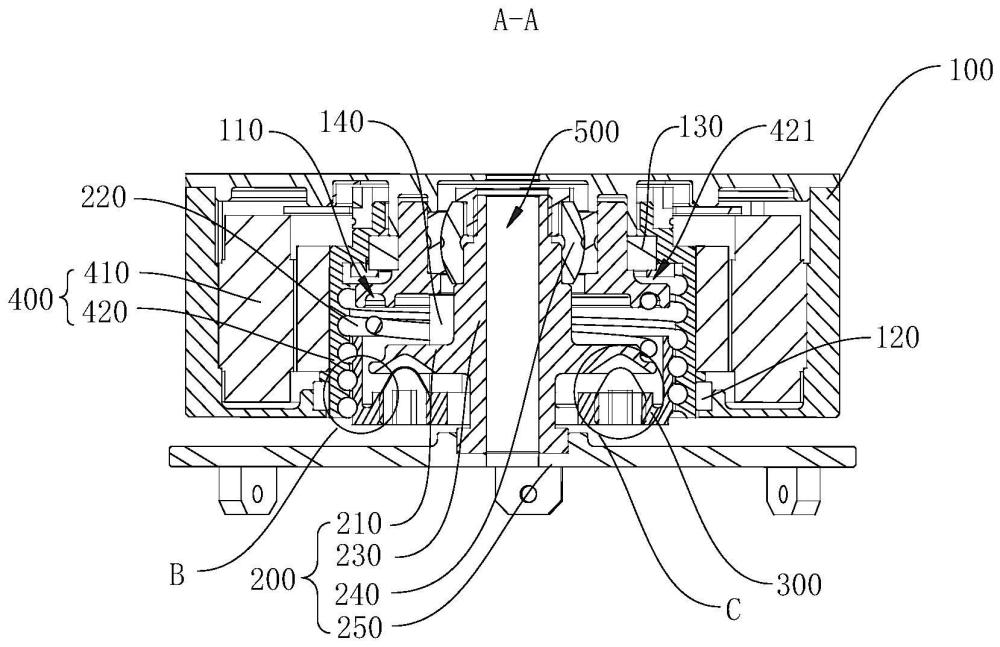
5、浮动组件,设置于所述安装部件,所述浮动组件包括浮动板和弹性件,所述弹性件连接所述安装部件和所述浮动板;
6、锁紧组件,设置于所述浮动板远离所述弹性件的一侧,所述锁紧组件适于与所述驱动组件连接以在锁紧位置和解锁位置之间切换,在所述锁紧位置,所述锁紧组件抵接并锁紧所述浮动板,在所述解锁位置,所述锁紧组件与所述浮动板分离。
7、根据本发明实施例的顺从装置,所述安装部件和所述浮动板的至少其中一个设置有卡接槽,所述弹性件与所述卡接槽卡接。
8、根据本发明实施例的顺从装置,所述弹性件的数量为一个,且所述弹性件的外周与所述浮动板的外侧相对应。
9、根据本发明实施例的顺从装置,所述浮动组件还包括:
10、浮动杆,包括第一端和第二端,所述浮动杆的中部设置有所述浮动板;
11、球面轴承,套设于所述第一端,连接所述安装部件和所述浮动杆;
12、连接板,安装于所述第二端,所述连接板适于连接所述执行部件。
13、根据本发明实施例的顺从装置,所述锁紧组件包括锁紧座和设置于所述锁紧座的限位件,所述驱动组件包括电机本体和旋转座,所述旋转座与所述锁紧座连接,所述电机本体与所述旋转座连接,以驱动所述旋转座转动并带动所述锁紧座移动,在所述锁紧位置,所述限位件抵接以锁紧所述浮动板,在所述解锁位置,所述限位件与所述浮动板分离。
14、根据本发明实施例的顺从装置,所述旋转座形成有容纳腔,所述锁紧组件和所述浮动组件的至少其中一个部分设置于所述容纳腔。
15、根据本发明实施例的顺从装置,所述旋转座和所述锁紧座均开设有螺旋槽并配合形成螺旋通道,所述螺旋通道内设置有滚珠。
16、根据本发明实施例的顺从装置,所述滚珠的数量为多个,且多个所述滚珠沿所述螺旋通道的周向或轴向分布。
17、根据本发明实施例的顺从装置,所述浮动板设置有与所述限位件配合的凹槽,且沿着靠近所述限位件的方向,所述凹槽的横截面积逐渐增大。
18、根据本发明实施例的顺从装置,所述限位件靠近所述凹槽的一端形成有球形面;或,
19、所述限位件靠近所述凹槽的一端安装有万向球,所述万向球适于沿所述凹槽滚动和转动。
20、根据本发明实施例的顺从装置,所述限位件的数量为多个,且多个所述限位件沿所述浮动板的圆周方向布置。
21、本发明第二方面的实施例,提供一种机器人,包括:
22、上述任意一项实施例所述的顺从装置;
23、机械臂;
24、执行机构,所述执行机构通过所述顺从装置与所述机械臂连接。
25、本发明实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
26、本发明实施例的顺从装置,由于锁紧组件设置于浮动板远离弹性件的一侧,锁紧组件在切换至锁紧位置并对浮动板进行锁紧的过程中无需克服弹性件的作用力,可以直接抵接并锁紧浮动板,从而增加锁紧过程,这有助于提高顺从装置的响应速度和效率;由于锁紧组件无需克服弹性件的作用力,驱动组件所需的功率会减少,这意味着在相同的工作条件下,使用更小功率的驱动组件即可实现相同的锁紧效果,从而降低顺从装置能源消耗和成本,由于选用了较小功率的驱动组件,还能降低驱动组件的重量,从而减轻顺从装置的整体重量。
27、浮动组件适于与执行部件连接,在执行部件完成指定的操作动作后,利用驱动组件驱动锁紧组件运动至锁紧位置实现对浮动组件进行锁紧,确保执行部件的操作动作和位置有一定的精度保证,利用驱动组件驱动锁紧组件运动至解锁位置实现对浮动组件进行解锁,浮动组件再次可使执行部件在一定角度范围和动作状态下保证偏转浮动,可以吸收一定范围内操作动作的误差和偏差。以此形成一定范围内的锁紧和浮动功能的相互切换,使得执行部件的抓取、搬运等动作流程可以顺利进行且具有较高精度。
28、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种顺从装置,其特征在于,包括:
2.根据权利要求1所述的顺从装置,其特征在于,所述安装部件和所述浮动板的至少其中一个设置有卡接槽,所述弹性件与所述卡接槽卡接。
3.根据权利要求1所述的顺从装置,其特征在于,所述弹性件的数量为一个,且所述弹性件的外周与所述浮动板的外侧相对应。
4.根据权利要求1所述的顺从装置,其特征在于,所述浮动组件还包括:
5.根据权利要求1-4任一项所述的顺从装置,其特征在于,所述锁紧组件包括锁紧座和设置于所述锁紧座的限位件,所述驱动组件包括电机本体和旋转座,所述旋转座与所述锁紧座连接,所述电机本体与所述旋转座连接,以驱动所述旋转座转动并带动所述锁紧座移动,在所述锁紧位置,所述限位件抵接以锁紧所述浮动板,在所述解锁位置,所述限位件与所述浮动板分离。
6.根据权利要求5所述的顺从装置,其特征在于,所述旋转座形成有容纳腔,所述锁紧组件和所述浮动组件的至少其中一个部分设置于所述容纳腔。
7.根据权利要求5所述的顺从装置,其特征在于,所述旋转座和所述锁紧座均开设有螺旋槽并配合形成螺旋通道,所述螺旋通道内设置有滚珠。
8.根据权利要求7所述的顺从装置,其特征在于,所述滚珠的数量为多个,且多个所述滚珠沿所述螺旋通道的周向或轴向分布。
9.根据权利要求5所述的顺从装置,其特征在于,所述浮动板设置有与所述限位件配合的凹槽,且沿着靠近所述限位件的方向,所述凹槽的横截面积逐渐增大。
10.根据权利要求9所述的顺从装置,其特征在于,所述限位件靠近所述凹槽的一端形成有球形面;或,
11.根据权利要求5所述的顺从装置,其特征在于,所述限位件的数量为多个,且多个所述限位件沿所述浮动板的圆周方向布置。
12.一种机械手,其特征在于,包括:
技术总结
本发明提供一种顺从装置及机器人,顺从装置包括安装部件、浮动组件和锁紧组件,浮动组件包括浮动板和弹性件,弹性件连接安装部件和浮动板,锁紧组件设置于浮动板远离弹性件的一侧,锁紧组件适于与驱动组件连接以在锁紧位置和解锁位置之间切换,在锁紧位置,锁紧组件抵接并锁紧浮动板,在解锁位置,锁紧组件与浮动板分离。由于锁紧组件设置于浮动板远离弹性件的一侧,锁紧组件在切换至锁紧位置并对浮动板进行锁紧的过程中无需克服弹性件的作用力,可以直接抵接并锁紧浮动板,从而加快锁紧过程,提高顺从装置的响应速度和效率;锁紧组件无需克服弹性件的作用力,驱动组件所需的功率会减少,降低顺从装置能源消耗和成本,减轻顺从装置的整体重量。
技术研发人员:叶彩峰,王泽
受保护的技术使用者:美的集团(上海)有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!