一种单动力实现自动拉、推、抓、放的执行机构的制作方法
本发明属于推拉结构,尤其涉及一种单动力实现自动拉、推、抓、放的执行机构。
背景技术:
1、在通过抓取把手实现对某一物体的推拉过程时,一般需要至少两个执行元件,即一个直线运动的执行元件实现推、拉动作,另一个执行元件(例如机械爪)实现对把手的抓、放动作。
2、执行元件过多意味着操作系统复杂,故障率高。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,解决或至少减轻目前的实现自动拉、推、抓、放的执行机构执行元件过多、故障率高的问题,提供一种单动力实现自动拉、推、抓、放的执行机构。
2、本发明是通过以下技术方案实现的:
3、一种单动力实现自动拉、推、抓、放的执行机构,所述执行机构设置于基座,所述执行机构包括直线执行元件、滑块、摆杆、推杆和勾爪;
4、所述直线执行元件驱动基座往复横向平移;
5、所述滑块沿横向直线滑动设置于基座,滑块与基座之间设置有弹簧,所述弹簧驱动滑块向基座前端平移,滑块上表面设置有内凹的定位槽,所述定位槽呈形,定位槽的尖端朝向基座后端;
6、所述摆杆一端横向铰接于基座后端、另一端滑动设置于滑块的定位槽内;
7、所述推杆沿滑块平移方向固定设置于滑块前端;
8、所述勾爪位于基座前端且位于推杆下方,勾爪后端与基座纵向铰接、前端与推杆前端对应设置;推杆前端移动至勾爪前端上方位置时,勾爪向上翻转。
9、为了进一步实现本发明,可优先选用以下技术方案:
10、优选地,所述基座上表面设置有内凹的一字形滑槽,所述滑块滑动设置于所述滑槽内,所述摆杆后端铰接与滑槽后端,所述推杆从滑槽前端穿出基座。
11、优选地,所述推杆前端设置有推块,所述推块前端面呈横向设置且内凹的弧面。
12、优选地,所述勾爪呈翻转的l形,勾爪的水平段端部纵向铰接于基座前端,勾爪的竖直段端部朝向推杆。
13、优选地,所述勾爪的水平段端部设置有向上的挡板,所述挡板与所述推块对应设置,推块移动至挡板时带动勾爪向上翻转。
14、优选地,所述勾爪与基座之间设置有扭簧,所述扭簧驱动勾爪向下翻转。
15、优选地,所述滑块的定位槽设置有初始位、抓取位、拉回位和释放位,所述初始位位于定位槽的后端尖处,所述抓取位和释放位分别位于定位槽的前端两个外凸处,所述拉回位位于定位槽的前端内凹处;
16、所述定位槽的初始位和拉回位朝向基座后端的一侧呈后凸的弧形,定位槽的抓取位和释放位朝向基座前端的一侧呈前凸的弧形;
17、所述定位槽的初始位和拉回位朝向基座后前端的一侧呈后凸的尖端状。
18、优选地,所述定位槽的初始位处的尖端位于初始位靠近释放位的一侧,定位槽的拉回位处的尖端位于拉回位靠近抓取位的一侧。
19、优选地,所述摆杆前端竖直设置有滑杆,所述滑杆呈圆柱状且滑动设置于定位槽内。
20、通过上述技术方案,本发明的有益效果是:
21、本发明利用滑块和摆杆实现了直线单动力即可完成拉、推、抓、放的动作,结构简单,运行可靠。
技术特征:
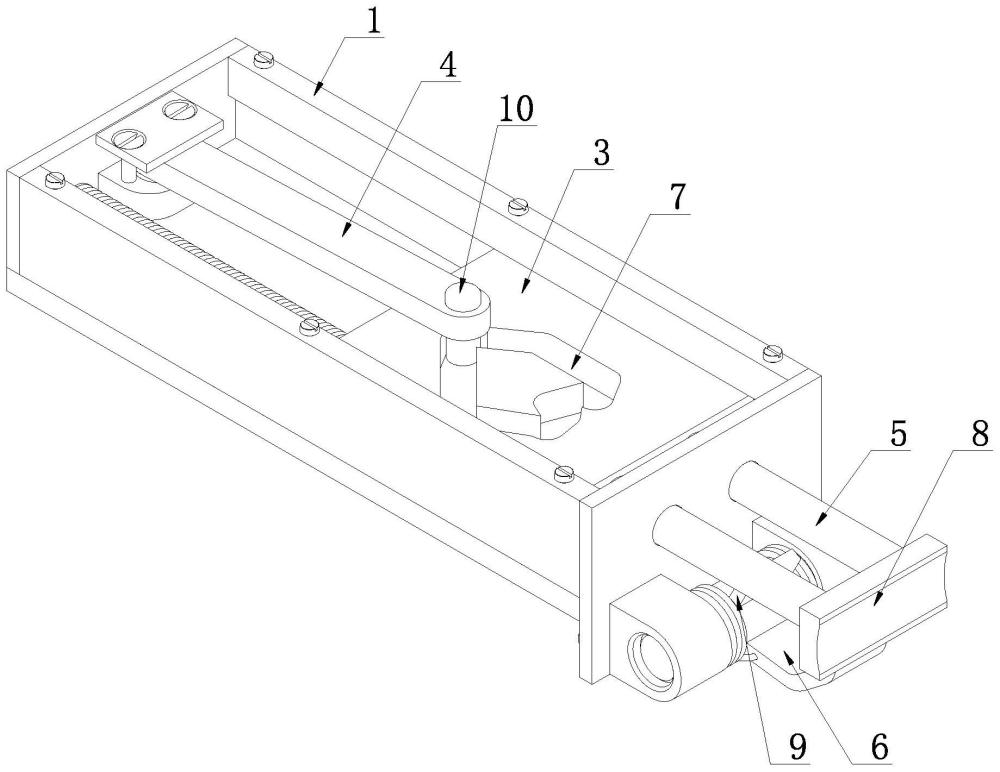
1.一种单动力实现自动拉、推、抓、放的执行机构,所述执行机构设置于基座(1),其特征在于,所述执行机构包括直线执行元件(2)、滑块(3)、摆杆(4)、推杆(5)和勾爪(6);
2.根据权利要求1所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述基座(1)上表面设置有内凹的一字形滑槽,所述滑块(3)滑动设置于所述滑槽内,所述摆杆(4)后端铰接与滑槽后端,所述推杆(5)从滑槽前端穿出基座(1)。
3.根据权利要求1所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述推杆(5)前端设置有推块(8),所述推块(8)前端面呈横向设置且内凹的弧面。
4.根据权利要求3所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述勾爪(6)呈翻转的l形,勾爪(6)的水平段端部纵向铰接于基座(1)前端,勾爪(6)的竖直段端部朝向推杆(5)。
5.根据权利要求4所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述勾爪(6)的水平段端部设置有向上的挡板(9),所述挡板(9)与所述推块(8)对应设置,推块(8)移动至挡板(9)时带动勾爪(6)向上翻转。
6.根据权利要求5所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述勾爪(6)与基座(1)之间设置有扭簧,所述扭簧驱动勾爪(6)向下翻转。
7.根据权利要求1所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述滑块(3)的定位槽(7)设置有初始位(701)、抓取位(702)、拉回位(703)和释放位(704),所述初始位(701)位于定位槽(7)的后端尖处,所述抓取位(702)和释放位(704)分别位于定位槽(7)的前端两个外凸处,所述拉回位(703)位于定位槽(7)的前端内凹处;
8.根据权利要求7所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述定位槽(7)的初始位(701)处的尖端位于初始位(701)靠近释放位(704)的一侧,定位槽(7)的拉回位(703)处的尖端位于拉回位(703)靠近抓取位(702)的一侧。
9.根据权利要求8所述的一种单动力实现自动拉、推、抓、放的执行机构,其特征在于,所述摆杆(4)前端竖直设置有滑杆(10),所述滑杆(10)呈圆柱状且滑动设置于定位槽(7)内。
技术总结
本发明涉及一种单动力实现自动拉、推、抓、放的执行机构,执行机构设置于基座,执行机构包括直线执行元件、滑块、摆杆、推杆和勾爪,直线执行元件驱动基座往复横向平移,滑块沿横向直线滑动设置于基座,滑块与基座之间设置有弹簧,滑块上表面设置有内凹的定位槽,定位槽呈形,摆杆一端横向铰接于基座后端、另一端滑动设置于滑块的定位槽内,推杆沿滑块平移方向固定设置于滑块前端,勾爪位于基座前端且位于推杆下方,勾爪后端与基座纵向铰接、前端与推杆前端对应设置。本发明的目的在于解决或至少减轻目前的实现自动拉、推、抓、放的执行机构执行元件过多、故障率高的问题,提供一种单动力实现自动拉、推、抓、放的执行机构。
技术研发人员:于涛,彭蕾,李伟轲,杨栋,李玉玲,代保贵,许帅,山淼岩
受保护的技术使用者:河南核净洁净技术有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!