一种长距离输水隧洞巡检机器人的制作方法
本发明涉及一种长距离输水隧洞巡检机器人,属于抽蓄电站设备。
背景技术:
1、抽蓄电站输水隧洞一般由引水隧洞、尾水隧洞构成。引水隧洞从上水库进/出水口连接到厂房安装层,立面高差较大,一般在200m以上,水头较高的甚至可达700m,目前国内采用三级平洞+两级斜井/竖井布置方式较多。上平洞一般长度在2km以内,中平洞及下平洞长度均较短,不超过0.5km。斜井倾角多在45~60°之间,单级斜井长度基本控制在400m以内。引水主洞直径多为6~10m之间。尾水系统隧洞长度一般在2km以内。
2、抽蓄电站输水隧洞具有洞线长、高水压等特点,长期运行容易出现开裂、塌方等缺陷,严重影响发电效率及围岩地质安全。因此非常有必要进行日常巡检,以便及时发现缺陷并采取处理措施。目前,常规人工检测具有须停机断流检修、检测不及时、效率低的缺点,因此急需一种可靠的巡检机器人检测技术。
3、现有技术中,水下机器人可分为有缆、无缆、履带式三种。其中,无缆机器人续航能力有限、水声通信延时高;有缆机器人对线缆的拖拽力不足以拉动长度15km以上的线缆(遇到弯曲或倾斜的隧洞,可拉动的线缆长度更短);履带式水下爬行机器人在转弯段易发生较大角度的突变,影响摄像装置等采集设备的平稳,影响采集信号,导致摄像的不清晰、不流畅。
4、为解决上述问题,我们提出了一种长距离输水隧洞巡检机器人。
技术实现思路
1、本发明的目的在于,提供一种长距离输水隧洞巡检机器人,本发明稳定性高、能耗低,并且对线缆的拖拽力大,可以在水质浑浊、附着淤积等洞内恶劣环境下均可连续进行巡检,可适应输水隧洞各段之间的衔接转角,保证图像信息的清晰性以及流畅性。
2、为解决上述技术问题,本发明采用如下的技术方案:一种长距离输水隧洞巡检机器人,包括水下系统和水上系统,所述水下系统和水上系统通过电缆连接,电缆用于供电及信号传输;
3、所述水下系统包括车体,所述车体包括车主体和履带式行进部件,所述履带式行进部件设置有四个,所述车体四角处侧壁均设置有固定轴承的一端,四个所述固定轴承的另一端分别设置于履带式行进部件一端的侧面,所述固定轴承用于调节履带式行进部件沿固定轴承转动的角度,所述车体通过电缆与水上系统连接。
4、前述的一种长距离输水隧洞巡检机器人,所述车主体内设置有调节电机,所述调节电机的输出端与固定轴承相连接,所述调节电机可调节固定轴承的转动角度。
5、前述的一种长距离输水隧洞巡检机器人,每个所述履带式行进部件均包括履带、两个履带轮,两个所述履带轮之间通过连接部件固定连接,所述履带套接在相互连接的两个所述履带轮上,所述固定轴承设置于连接部件的一端侧壁,所述固定轴承可调节连接部件沿固定轴承转动的角度。
6、前述的一种长距离输水隧洞巡检机器人,所述履带轮均连接有动力装置,所述动力装置设置于车主体内,所述动力装置为履带轮提供动力。
7、前述的一种长距离输水隧洞巡检机器人,所述水下系统还包括有机械手和辅助测试设备,所述机械手以及辅助测试设备均设置在车主体上。
8、前述的一种长距离输水隧洞巡检机器人,所述辅助测试设备包括摄像装置、侧扫声呐探测仪,所述摄像装置的探测端均设置在机械手的前端,所述侧扫声呐探测仪沿车主体四周布置。
9、前述的一种长距离输水隧洞巡检机器人,所述机械手为多关节机械手。
10、前述的一种长距离输水隧洞巡检机器人,所述水上系统包含电机系统、通信系统、绞车系统以及显控平台,所述电缆缠绕于绞车系统上,所述电缆分别与电机系统、通信系统和显控平台电连接,所述电机系统分别与通信系统、绞车系统以及显控平台电连接,所述通信系统与显控平台电连接。
11、前述的一种长距离输水隧洞巡检机器人,所述绞车系统包括底座,所述底座的两侧设置有相互平行的支架,所述支架之间可转动地安装有绕线轮,所述电缆缠绕在绕线轮上,所述底座上设置有绕线电机,所述绕线电机的输出端设置有主动轮,所述主动轮与绕线轮耦合连接。
12、前述的一种长距离输水隧洞巡检机器人,两个所述支架之间设置有理线部件,所述绕线轮上的电缆穿过理线部件与车体连接。
13、与现有技术相比,本发明通过设置有可调节着地角度的履带式行进部件,进而实现机器人的前行、跨越动作,在输水隧洞上平、下平、中平洞、上斜、下斜段,采用四组履带式行进部件平行着地的方式,在各平洞和斜井的转弯段,根据转弯角度调整履带式行进部件的着地角度,保持车主体不至于发生较大角度的突变,从而保证机械手前端摄像装置采集端的平稳,保证摄像的清晰度和流畅性,使本发明具有稳定性高、能耗低和对线缆的拖拽力大的特点,同时可适应输水隧洞各段之间的衔接转角,保证图像信息的流畅性。
技术特征:
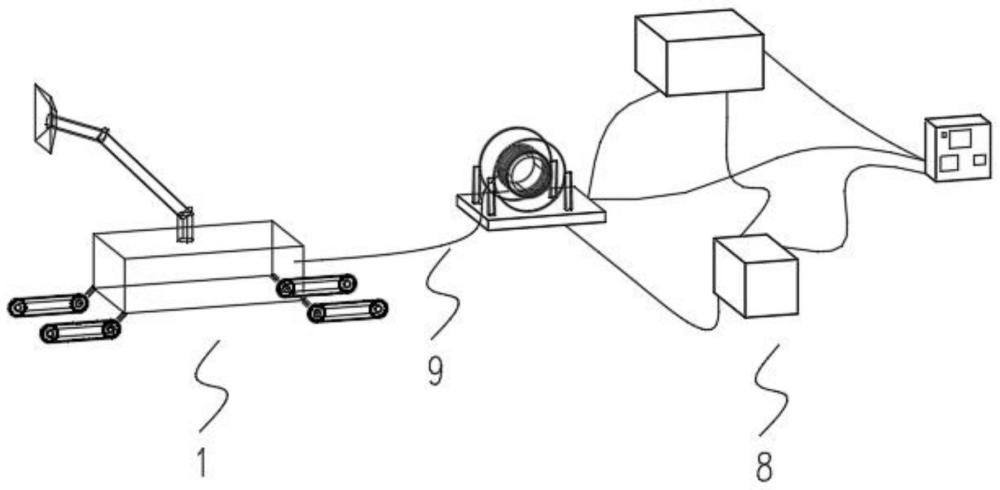
1.一种长距离输水隧洞巡检机器人,其特征在于,包括水下系统(1)和水上系统(8),所述水下系统(1)和水上系统(8)通过电缆(9)连接;
2.根据权利要求1所述的一种长距离输水隧洞巡检机器人,其特征在于,所述车主体(3)内设置有调节电机,所述调节电机的输出端与固定轴承(7)相连接,所述调节电机可调节固定轴承(7)的转动角度。
3.根据权利要求2所述的一种长距离输水隧洞巡检机器人,其特征在于,每个所述履带式行进部件(4)均包括履带(5)、两个履带轮(6),两个所述履带轮(6)之间通过连接部件(17)固定连接,所述履带(5)套接在相互连接的两个所述履带轮(6)上,所述固定轴承(7)设置于连接部件(17)的一端侧壁,所述固定轴承(7)可调节连接部件(17)沿固定轴承(7)转动的角度。
4.根据权利要求3所述的一种长距离输水隧洞巡检机器人,其特征在于,所述履带轮(6)均连接有动力装置,所述动力装置设置于车主体(3)内,所述动力装置为履带轮(6)提供动力。
5.根据权利要求1所述的一种长距离输水隧洞巡检机器人,其特征在于,所述水下系统(1)还包括有机械手(10)和辅助测试设备(11),所述机械手(10)以及辅助测试设备(11)均设置在车主体(3)上。
6.根据权利要求5所述的一种长距离输水隧洞巡检机器人,其特征在于,所述辅助测试设备(11)包括摄像装置(12)、侧扫声呐探测仪(13),所述摄像装置(12)的探测端均设置在机械手(10)的前端,所述侧扫声呐探测仪(13)沿车主体(3)四周布置。
7.根据权利要求6所述的一种长距离输水隧洞巡检机器人,其特征在于,所述机械手(10)为多关节机械手。
8.根据权利要求1所述的一种长距离输水隧洞巡检机器人,其特征在于,所述水上系统(8)包含电机系统(24)、通信系统(14)、绞车系统(15)以及显控平台(16),所述电缆(9)缠绕于绞车系统(15)上,所述电缆(9)分别与电机系统(24)、通信系统(14)和显控平台(16)电连接,所述电机系统(24)分别与通信系统(14)、绞车系统(15)以及显控平台(16)电连接,所述通信系统(14)与显控平台(16)电连接。
9.根据权利要求8所述的一种长距离输水隧洞巡检机器人,其特征在于,所述绞车系统(15)包括底座(18),所述底座(18)的两侧设置有相互平行的支架(19),所述支架(19)之间可转动地安装有绕线轮(20),所述电缆(9)缠绕在绕线轮(20)上,所述底座(18)上设置有绕线电机(21),所述绕线电机(21)的输出端设置有主动轮(22),所述主动轮(22)与绕线轮(20)耦合连接。
10.根据权利要求9所述的一种长距离输水隧洞巡检机器人,其特征在于,两个所述支架(19)之间设置有理线部件(23),所述绕线轮(20)上的电缆(9)穿过理线部件(23)与车体(2)连接。
技术总结
本发明公开了一种长距离输水隧洞巡检机器人,包括基座,基座顶部依次排列有成形道次部件,基座的两侧分别设置有进料部件和出料部件,成形道次部件包括底座,底座上设置有两个滑动平台,滑动平台上均可转动安装有装配元件,装配元件内侧沿竖直方向依次设置有上辊轮和下辊轮,底座的两侧均装配有水平伸缩部件组,水平伸缩部件组可带动装配元件偏转以及滑动。本发明通过将可变截面产品的辊压工艺的运动轨迹分解成机构运动参数,从而控制成形过程,水平伸缩部件组主要负责调控辊轮的运动轨迹,多个成形道次部件可将板材依次逐步成形特定形状,从而生产可变截面的复杂产品,提高了生产产品的多样化,支持产品定制化生产。
技术研发人员:赵迎九,马骁,刘晓东,柴少泰
受保护的技术使用者:华电重工股份有限公司
技术研发日:
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!