一种适用于无人化连杆加工车间的五自由度机械臂
本发明涉及机械臂加工设备,尤其是一种适用于无人化连杆加工车间的五自由度机械臂。
背景技术:
1、近年来,随着人工智能、物联网、云计算等技术的飞速发展,机械臂的智能化和自主化水平不断提高,应用领域也不断扩大,将机械臂应用于数字化生产线不仅可以提高生产效率和产品质量,还可以提高生产过程的安全性、可靠性,降低劳动强度、减少用工成本。
2、连杆是一种使用广泛的机械零件,设计连杆数字化加工生产线上使用的机械臂,对未来各种类型的连杆数字化加工有极其重要的意义。目前,国内外研制的机械臂存在成本高、可靠性差、精度低等问题,另外,鲜有专门应用于连杆数字化无人加工生产线的机械臂,并且由于连杆的结构不规则,容易导致抓取过程中因夹爪受力不平衡使连杆掉落。
技术实现思路
1、本发明为了弥补现有技术的不足,提供了一种适用于无人化连杆加工车间的五自由度机械臂,它结构设计合理,操作方便,通过滚珠丝杠传动提高机械臂的精度,通过关节驱动部件前置,降低了末端负载,提高了机械臂的快速响应能力。此机械臂控制简单可靠、运动灵活、可实现模块化,解决了现有技术中存在的问题。
2、本发明为解决上述技术问题所采用的技术方案是:
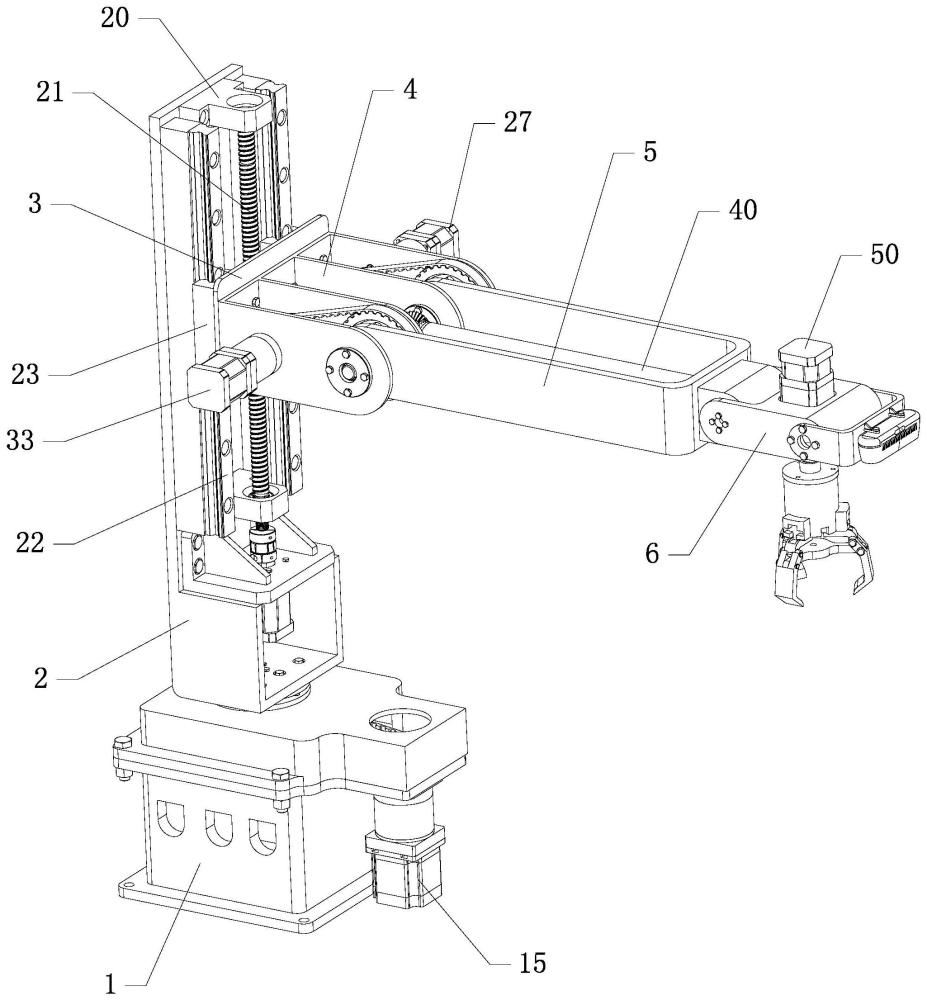
3、一种适用于无人化连杆加工车间的五自由度机械臂,包括基座,在基座上设有升降支架,所述升降支架通过第一关节旋转机构与基座相连,在升降支架一侧设有升降台,所述升降台通过第二关节平移机构与升降支架相连,在升降台侧壁上设有支撑架,一主臂支架通过第三关节俯仰机构与支撑架相连,在主臂支架外端设有副臂支架,所述副臂支架通过第四关节俯仰机构与主臂支架相连,在副臂支架下方设有抓取机构,所述抓取机构通过第五关节旋转机构与副臂支架相连,在副臂支架前端设有视觉识别机构。
4、可选地,所述第一关节旋转机构包括竖直设置的第一传动轴,所述基座包括基架和水平设置在基架顶部的基板,在基板上罩设基盖,所述第一传动轴的下端向下依次穿过基盖、基板并伸至基架内,其上端则通过连接板与升降支架的底部相连,在对应第一传动轴位置的基盖上设有活动套设在第一传动轴上的上法兰,在上法兰内设有与第一传动轴相套接的调心球轴承,在对应第一传动轴位置的基板上设有活动套设在第一传动轴上的下法兰,在下法兰内设有与第一传动轴相套接的第一深沟球轴承,在上法兰与下法兰之间的第一传动轴上固定套设第一大带轮,在第一大带轮与下法兰之间的第一传动轴上套设推力球轴承,在基架外侧的基板底部设有第一步进电机,第一步进电机的输出轴向上穿过基板与水平设置在基板上的第一小带轮相连,在第一大带轮与第一小带轮上绕设第一同步带。
5、可选地,所述第二关节平移机构设置在升降支架底部的第二步进电机,所述升降支架包括底座和设置在底座上的支撑板,设置在底座内的第二步进电机,其输出轴向上穿出底座与梅花联轴器相连,在对应梅花联轴器一侧的支撑板上下两端分别对称设有限位座,一竖直设置的滚珠丝杠,其上端活动卡接在上侧的限位座内,其下端则向下穿出下层的限位座与梅花联轴器相连,在滚珠丝杠前后两侧的支撑板上对称设有滑轨,在升降台左侧壁前后两侧分别设有活动卡接在对应一侧滑轨上的滑块,在升降台左侧壁中部设有与滚珠丝杠螺纹相连的丝杠螺母座。
6、可选地,在两个限位座内分别设有与滚珠丝杠相配合的第二深沟球轴承,在滚珠丝杠的上侧轴端设有弹性挡圈。
7、可选地,所述第三关节俯仰机构包括设置在支撑架后侧壁上的第三步进电机,所述支撑架包括与升降台相连的固定板,在固定板外侧壁沿其水平方向自前向后依次均匀间隔竖直设有四个齿板,第三步进电机的输出轴水平穿过第四个的齿板与第二小带轮相连,在第一个的齿板、第四个的齿板侧壁上分别设有第一轴承端盖,所述主臂支架包括u型主臂和设置在u型主臂连接段右侧壁上的固定罩,所述u型主臂分别通过设置在其自由段端部的第二传动轴活动穿过相应一侧的第一轴承端盖,在对应第二小带轮位置的第二传动轴上套设第二大带轮,在第二大带轮与第二小带轮上绕设第二同步带。
8、可选地,所述第四关节俯仰机构包括设置在支撑架前侧壁上的第四步进电机,第四步进电机的输出轴水平穿过第一个的齿板与第三小带轮相连,在第二个的齿板外端设有第二轴承端盖,一第三传动轴活动穿过第二轴承端盖,在对应第三小带轮位置的第三传动轴上套设第三大带轮,在第三大带轮与第三小带轮上绕设第三同步带,第三传动轴的后端则伸入第二个的齿板、第三个的齿板之间与第一主动锥齿轮相连,在u型主臂的连接段侧壁上设有伸入到第二个的齿板、第三个的齿板之间的主臂套筒,在主臂套筒内活动套接主臂传动轴,主臂传动轴的左端伸出主臂套筒与第一从动圆锥齿轮相连,所述第一从动圆锥齿轮与第一主动锥齿轮相啮合,主臂传动轴的右端活动穿过u型主臂与第二主动锥齿轮相连,在固定罩前后两侧侧壁对称设有通孔,在各个通孔内均卡设第三深沟球轴承,在各个第三深沟球轴承内均卡设第四传动轴,两根第四传动轴的外端均向外伸出固定罩与副臂支架相连,在前侧的第四传动轴内端设有与第二主动锥齿轮相啮合的第二从动圆锥齿轮。
9、可选地,在第三个的齿板侧壁上设有第三轴承端盖,在第三轴承端盖上设有与第一主动锥齿轮相啮合的辅助锥齿轮。
10、可选地,所述第五关节旋转机构包括设置在副臂支架内的第五步进电机,第五步进电机的输出轴向下活动穿出副臂支架与抓取机构相连。
11、可选地,所述抓取机构包括与第五关节旋转机构相连的三爪手指气缸,在三爪手指气缸的各个卡爪底部分别设有转接板,在各个转接板外端分别活动铰接夹爪,在转接板下方的各个夹爪之间水平设有定位板,定位板呈三角状,其角端分别活动铰接在对应一侧的夹爪上,且均位于转接板与夹爪铰接位置的下方。
12、可选地,所述视觉识别机构包括固连在副臂支架上的相机安装支架,在相机安装支架外侧设有深度相机,深度相机通过相机固定件与相机安装支架相连。
13、本发明采用上述技术方案,所具有的优点是:
14、1、本发明拥有五个自由度,能够较为灵活的完成连杆的抓取、放置等搬运动作;
15、2、通过视觉识别机构可以实现连杆位姿的识别,辅助控制装置进行连杆抓取,有效提高抓取效率和抓取可靠性;
16、3、通过滚珠丝杠传动,替换传统机械臂在此处的两个俯仰关节,降低了机械臂结构上的复杂度,便于控制的实现,同时提高了机械臂竖直方向的精度;
17、4、通过第四关节俯仰机构实现副臂支架的翻转,既保证了机械臂整体的对称美观,又有效的降低了末端的负载,实现机械臂的快速响应;
18、5、五个自由度之间可拆卸,方便后期维修与维护。
技术特征:
1.一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,包括基座,在基座上设有升降支架,所述升降支架通过第一关节旋转机构与基座相连,在升降支架一侧设有升降台,所述升降台通过第二关节平移机构与升降支架相连,在升降台侧壁上设有支撑架,一主臂支架通过第三关节俯仰机构与支撑架相连,在主臂支架外端设有副臂支架,所述副臂支架通过第四关节俯仰机构与主臂支架相连,在副臂支架下方设有抓取机构,所述抓取机构通过第五关节旋转机构与副臂支架相连,在副臂支架前端设有视觉识别机构。
2.根据权利要求1所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,所述第一关节旋转机构包括竖直设置的第一传动轴,所述基座包括基架和水平设置在基架顶部的基板,在基板上罩设基盖,所述第一传动轴的下端向下依次穿过基盖、基板并伸至基架内,其上端则通过连接板与升降支架的底部相连,在对应第一传动轴位置的基盖上设有活动套设在第一传动轴上的上法兰,在上法兰内设有与第一传动轴相套接的调心球轴承,在对应第一传动轴位置的基板上设有活动套设在第一传动轴上的下法兰,在下法兰内设有与第一传动轴相套接的第一深沟球轴承,在上法兰与下法兰之间的第一传动轴上固定套设第一大带轮,在第一大带轮与下法兰之间的第一传动轴上套设推力球轴承,在基架外侧的基板底部设有第一步进电机,第一步进电机的输出轴向上穿过基板与水平设置在基板上的第一小带轮相连,在第一大带轮与第一小带轮上绕设第一同步带。
3.根据权利要求1或2所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,所述第二关节平移机构设置在升降支架底部的第二步进电机,所述升降支架包括底座和设置在底座上的支撑板,设置在底座内的第二步进电机,其输出轴向上穿出底座与梅花联轴器相连,在对应梅花联轴器一侧的支撑板上下两端分别对称设有限位座,一竖直设置的滚珠丝杠,其上端活动卡接在上侧的限位座内,其下端则向下穿出下层的限位座与梅花联轴器相连,在滚珠丝杠前后两侧的支撑板上对称设有滑轨,在升降台左侧壁前后两侧分别设有活动卡接在对应一侧滑轨上的滑块,在升降台左侧壁中部设有与滚珠丝杠螺纹相连的丝杠螺母座。
4.根据权利要求3所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,在两个限位座内分别设有与滚珠丝杠相配合的第二深沟球轴承,在滚珠丝杠的上侧轴端设有弹性挡圈。
5.根据权利要求1所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,所述第三关节俯仰机构包括设置在支撑架后侧壁上的第三步进电机,所述支撑架包括与升降台相连的固定板,在固定板外侧壁沿其水平方向自前向后依次均匀间隔竖直设有四个齿板,第三步进电机的输出轴水平穿过第四个的齿板与第二小带轮相连,在第一个的齿板、第四个的齿板侧壁上分别设有第一轴承端盖,所述主臂支架包括u型主臂和设置在u型主臂连接段右侧壁上的固定罩,所述u型主臂分别通过设置在其自由段端部的第二传动轴活动穿过相应一侧的第一轴承端盖,在对应第二小带轮位置的第二传动轴上套设第二大带轮,在第二大带轮与第二小带轮上绕设第二同步带。
6.根据权利要求5所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,所述第四关节俯仰机构包括设置在支撑架前侧壁上的第四步进电机,第四步进电机的输出轴水平穿过第一个的齿板与第三小带轮相连,在第二个的齿板外端设有第二轴承端盖,一第三传动轴活动穿过第二轴承端盖,在对应第三小带轮位置的第三传动轴上套设第三大带轮,在第三大带轮与第三小带轮上绕设第三同步带,第三传动轴的后端则伸入第二个的齿板、第三个的齿板之间与第一主动锥齿轮相连,在u型主臂的连接段侧壁上设有伸入到第二个的齿板、第三个的齿板之间的主臂套筒,在主臂套筒内活动套接主臂传动轴,主臂传动轴的左端伸出主臂套筒与第一从动圆锥齿轮相连,所述第一从动圆锥齿轮与第一主动锥齿轮相啮合,主臂传动轴的右端活动穿过u型主臂与第二主动锥齿轮相连,在固定罩前后两侧侧壁对称设有通孔,在各个通孔内均卡设第三深沟球轴承,在各个第三深沟球轴承内均卡设第四传动轴,两根第四传动轴的外端均向外伸出固定罩与副臂支架相连,在前侧的第四传动轴内端设有与第二主动锥齿轮相啮合的第二从动圆锥齿轮。
7.根据权利要求6所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,在第三个的齿板侧壁上设有第三轴承端盖,在第三轴承端盖上设有与第一主动锥齿轮相啮合的辅助锥齿轮。
8.根据权利要求6所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,所述第五关节旋转机构包括设置在副臂支架内的第五步进电机,第五步进电机的输出轴向下活动穿出副臂支架与抓取机构相连。
9.根据权利要求1或8所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,所述抓取机构包括与第五关节旋转机构相连的三爪手指气缸,在三爪手指气缸的各个卡爪底部分别设有转接板,在各个转接板外端分别活动铰接夹爪,在转接板下方的各个夹爪之间水平设有定位板,定位板呈三角状,其角端分别活动铰接在对应一侧的夹爪上,且均位于转接板与夹爪铰接位置的下方。
10.根据权利要求1所述的一种适用于无人化连杆加工车间的五自由度机械臂,其特征在于,所述视觉识别机构包括固连在副臂支架上的相机安装支架,在相机安装支架外侧设有深度相机,深度相机通过相机固定件与相机安装支架相连。
技术总结
本发明涉及机械臂加工设备技术领域,尤其是一种适用于无人化连杆加工车间的五自由度机械臂。它包括基座,在基座上设有升降支架,所述升降支架通过第一关节旋转机构与基座相连,在升降支架一侧设有升降台,所述升降台通过第二关节平移机构与升降支架相连,在升降台侧壁上设有支撑架,一主臂支架通过第三关节俯仰机构与支撑架相连,在主臂支架外端设有副臂支架。它结构设计合理,操作方便,通过滚珠丝杠传动提高机械臂的精度,通过关节驱动部件前置,降低了末端负载,提高了机械臂的快速响应能力。此机械臂控制简单可靠、运动灵活、可实现模块化,解决了现有技术中存在的问题。
技术研发人员:刘延俊,游华强,殷颂,王登帅,石振杰,李明辰
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!