一种非能动重力抓具的制作方法
本发明涉及抓具领域,具体涉及到一种非能动重力抓具。
背景技术:
1、圆柱桶通常是铁制的桶型物,可用于装液体、固体,一般呈圆柱状,有底,底口以铁片封闭,上口边缘具有突出边缘,抓具可抓住此突出边缘以对圆柱桶进行搬运。现有抓具多需要人员近距离手动操作,设备简单,并且在搬运过程中容易发生圆柱桶从抓具脱落的情况。当圆柱桶内装有放射性物质时,人工搬运会使人员身体承受一定损害,因此,手动夹具无法适应辐射区域无人化搬运的生产要求。
技术实现思路
1、有鉴于此,本发明提供一种非能动重力抓具,旨在不依靠人工的情况下,依靠抓具零部件自身的重力实现圆柱桶的搬运,提高抓具的可靠性。
2、为解决以上技术问题,本发明所采用的技术方案为:
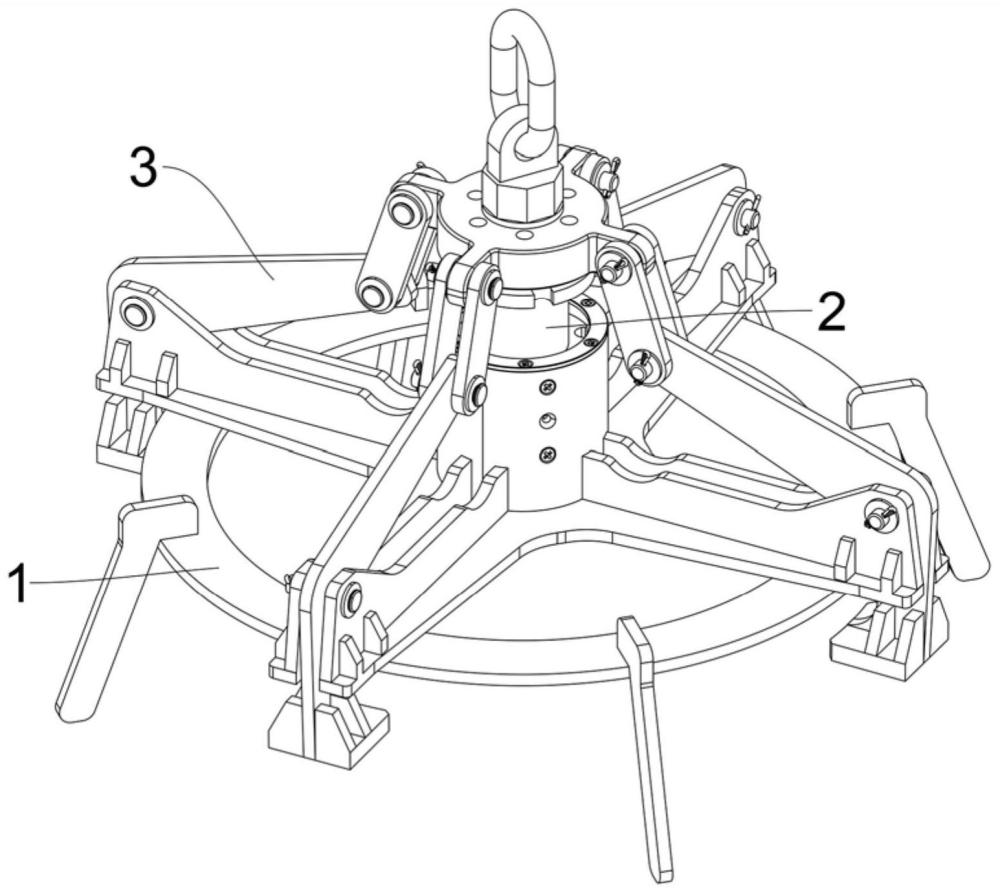
3、一种非能动重力抓具,包括底盘机构、转锁机构和夹爪机构;所述底盘机构包括限位筒;所述转锁机构包括连接盘、上齿圈、套筒、下齿圈、转动轴、横杆、限位块和限位座;所述套筒滑动连接于所述限位筒内;所述上齿圈安装于所述套筒的顶部,所述下齿圈安装于所述套筒的底部,且所述上齿圈与所述下齿圈间隔一定距离设置;所述上齿圈的底部具有多个旋转推动齿,所述下齿圈的顶部具有多个锥形齿,且所述旋转推动齿与所述锥形齿相互错开设置;所述转动轴的上端位于所述套筒内,所述横杆连接于所述转动轴的上端,且所述横杆位于所述上齿圈与所述下齿圈之间;当所述横杆与所述旋转推动齿接触后,所述旋转推动齿会推动所述横杆往一个方向转动;所述限位块连接于所述转动轴的下端并位于所述限位筒内;所述限位座连接于所述限位筒的底部;所述限位座内部具有空腔且所述限位座的顶部具有供所述限位块穿过的限位孔;所述连接盘与所述套筒相连接;多个所述夹爪机构分散地连接于所述底盘机构与所述连接盘之间,当所述连接盘向上运动时,所述夹爪机构作夹紧动作,当所述连接盘向下运动时,所述夹爪机构作松开动作。
4、在一些实施方式中,所述旋转推动齿设有四个;所述锥形齿设有四个。
5、在一些实施方式中,所述限位块的横截面为非圆形;所述限位孔的形状与所述限位块的横截面形状一致。
6、在一些实施方式中,所述转锁机构还包括吊环和基座;所述吊环通过所述基座与所述连接盘相连接。
7、在一些实施方式中,所述转锁机构还包括导向柱;所述导向柱固定连接于所述限位筒内;所述套筒上设有与所述导向柱适配的导向槽。
8、在一些实施方式中,所述底盘机构还包括底盘和多个支撑筋;所述限位筒通过所述支撑筋与所述底盘相连接。
9、在一些实施方式中,所述底盘机构还包括多个分散连接于所述底盘四周的导向柱。
10、在一些实施方式中,所述导向柱从上到下逐渐向外倾斜设置。
11、在一些实施方式中,所述夹爪机构包括短连杆和长连杆,所述长连杆包括呈夹角设置的长臂段和短臂段;所述短连杆的一端与所述连接盘相铰接,另一端与所述长臂段的一端相铰接,所述长臂段和所述短臂段的连接处与所述支撑筋的末端相铰接。
12、在一些实施方式中,所述夹爪机构还包括卡爪;所述卡爪连接于所述短臂段的末端并向着内侧凸出。
13、综上所述,本发明与现有技术相比,具有如下优点和有益效果:使用本发明所述的抓具来抓取圆柱桶时,夹爪机构可在转锁机构自身零部件的重力作用下实现锁定和分开,整个过程不必再有人工直接参与,在提高搬运效率的同时也避免了人工接触到辐射物质,保护了人工安全。
技术特征:
1.一种非能动重力抓具,其特征在于:包括底盘机构(1)、转锁机构(2)和夹爪机构(3);
2.如权利要求1所述的一种非能动重力抓具,其特征在于:所述旋转推动齿设有四个;所述锥形齿设有四个。
3.如权利要求1所述的一种非能动重力抓具,其特征在于:所述限位块(29)的横截面为非圆形;所述限位孔(213)的形状与所述限位块(29)的横截面形状一致。
4.如权利要求1所述的一种非能动重力抓具,其特征在于:所述转锁机构(2)还包括吊环(21)和基座(22);所述吊环(21)通过所述基座(22)与所述连接盘(23)相连接。
5.如权利要求1所述的一种非能动重力抓具,其特征在于:所述转锁机构(2)还包括导向柱(211);所述导向柱(211)固定连接于所述限位筒(13)内;所述套筒(25)上设有与所述导向柱(211)适配的导向槽(210)。
6.如权利要求1所述的一种非能动重力抓具,其特征在于:所述底盘机构(1)还包括底盘(11)和多个支撑筋(12);所述限位筒(13)通过所述支撑筋(12)与所述底盘(11)相连接。
7.如权利要求6所述的一种非能动重力抓具,其特征在于:所述底盘机构(1)还包括多个分散连接于所述底盘(11)四周的导向柱(14)。
8.如权利要求7所述的一种非能动重力抓具,其特征在于:所述导向柱(14)从上到下逐渐向外倾斜设置。
9.如权利要求6所述的一种非能动重力抓具,其特征在于:所述夹爪机构(3)包括短连杆(31)和长连杆(32),所述长连杆(32)包括呈夹角设置的长臂段(321)和短臂段(322);所述短连杆(31)的一端与所述连接盘(23)相铰接,另一端与所述长臂段(321)的一端相铰接,所述长臂段(321)和所述短臂段(322)的连接处与所述支撑筋(12)的末端相铰接。
10.如权利要求9所述的一种非能动重力抓具,其特征在于:所述夹爪机构(3)还包括卡爪(33);所述卡爪(33)连接于所述短臂段(322)的末端并向着内侧凸出。
技术总结
本发明涉及抓具领域,具体涉及到一种非能动重力抓具,包括底盘机构、转锁机构和夹爪机构;底盘机构包括限位筒;转锁机构包括连接盘、上齿圈、套筒、下齿圈、转动轴、横杆、限位块和限位座;套筒滑动连接于限位筒内;上齿圈具有多个旋转推动齿,下齿圈具有多个锥形齿;限位座连接于限位筒的底部;连接盘与套筒相连接;多个夹爪机构分散地连接于限位筒四周,当连接盘向上运动时,夹爪机构作夹紧动作,当连接盘向下运动时,夹爪机构作松开动作。使用本发明所述的抓具来抓取圆柱桶时,夹爪机构可在转锁机构自身零部件的重力作用下实现锁定和分开,整个过程不必再有人工参与,在提高搬运效率的同时也避免了人工接触到辐射物质,保护了人工安全。
技术研发人员:石曙光,周大海,徐成琼,石志勇,汤成国,张列源,李元林,王靖
受保护的技术使用者:四川航天神坤科技有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!