基于全驱系统理论的欠驱动机器人自适应控制方法及系统
本公开涉及机器人控制相关,具体地说,是涉及一种基于全驱系统理论的欠驱动机器人自适应控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,并不必然构成在先技术。
2、实际应用中,许多机械系统都呈现出欠驱动特性,包括各类起重机、无人机、移动机器人、柔性机械臂、水面舰艇等,他们的独立控制量少于实际运动自由度,可统称为欠驱动机器人。此类系统在港口物流、工业制造、航空航天、医疗服务和搜索救援等领域发挥重要作用。欠驱动机器人在多个领域具有广泛的应用价值。因此,如何对此类机器人实施高效准确的控制变得尤为关键,高效准确的控制可以保证系统稳定性,降低能耗,并提高作业精度与效率。
3、对于欠驱动机器人而言,其可驱动部分控制着整个系统的运动,而非驱动部分则受控于可驱动部分的影响。根据其结构特性,可大致将欠驱动机器人分为省去部分执行机构的欠驱动机器人、具有非完整约束的欠驱动机器人等。实际应用中,欠驱动机器人具有复杂的非线性动力学特性,通常伴随着外部扰动、无法有效建模的未知动态、参数不确定等因素的持续影响,特别是难以对非驱动变量进行精准控制。
4、近年来,为推动实际欠驱动机器人向数字化、智能化迈进,国内外学者已进行了相关研究并取得了一定的成果。发明人在研究中发现,目前大多方法主要集中于某个特定的对象,例如起重机、无人机及欠驱动机械臂,并且现有方法依赖于具体对象具体的动力学模型设计控制器;现有针对一类欠驱动机器人的研究,大多将模型整理为特定的标准形式,导致适用范围受限,或需要精确的系统参数生成控制命令;对于一类欠驱动机器人的驱动控制在暂态性能、控制精度、安全性等方面广泛存在的共性问题,仍缺少切实可行且具有较强通用性的解决方案。
技术实现思路
1、本公开为了解决上述问题,提出了一种基于全驱系统理论的欠驱动机器人自适应控制方法及系统,通过构造辅助变量将欠驱动机器人的非线性动态模型有效解耦,进而将非线性动态模型改写为全驱系统结构,便于将线性系统中的各类性质(如能控性、能观性等)与控制器、观测器设计方案应用于非线性欠驱动机器人,并且实现可驱动与非驱动状态的快速定位,有效提高欠驱动机器人的效率和控制精度。
2、为了实现上述目的,本公开采用如下技术方案:
3、一个或多个实施例提供了基于全驱系统理论的欠驱动机器人自适应控制方法,基于欠驱动机器人系统非线性动力学特性与耦合关系,将具有较强耦合关系的可驱动变量与非驱动变量动态组合到同一高阶辅助变量中,使欠驱动机器人的非线性动力学模型转化为关于该辅助变量的全驱系统结构,基于全驱系统理论对欠驱动机器人进行控制。
4、一个或多个实施例提供了基于全驱系统理论的欠驱动机器人自适应控制系统,包括:
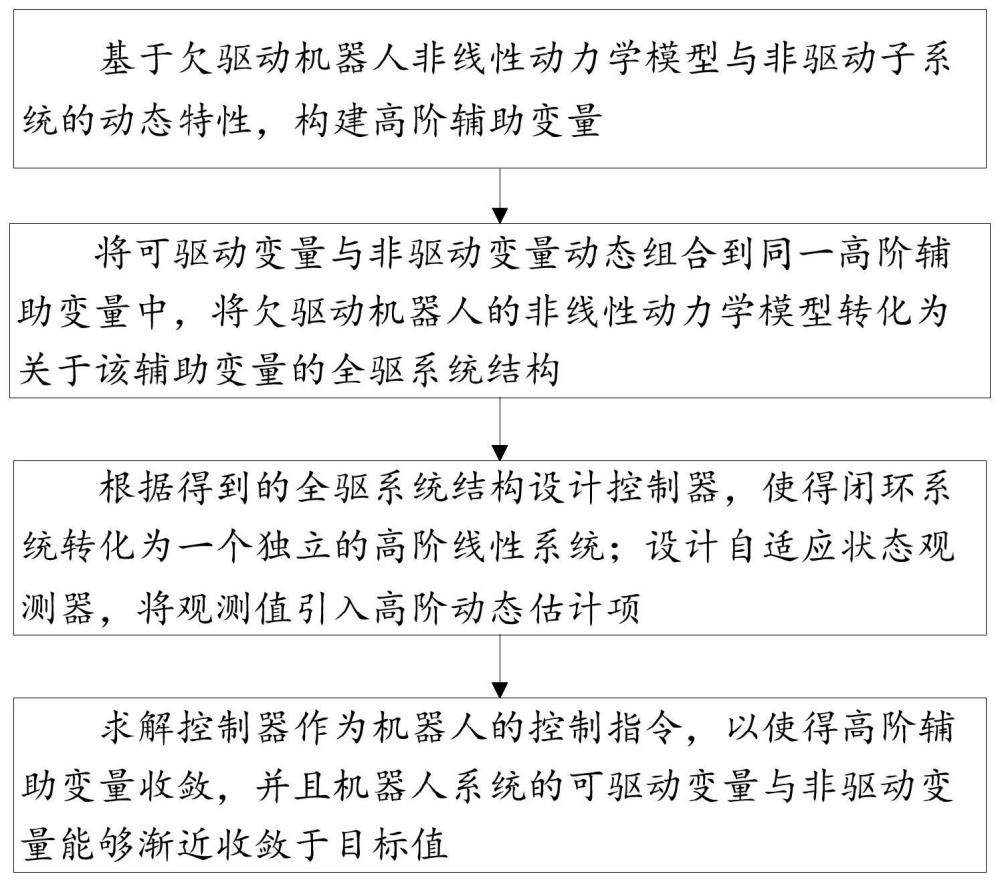
5、模型构建模块:被配置为基于欠驱动机器人非线性动力学模型与非驱动子系统的动态特性,构建高阶辅助变量;
6、模型转化模块:被配置为将可驱动变量与非驱动变量动态组合到同一高阶辅助变量中,将欠驱动机器人的非线性动力学模型转化为关于该辅助变量的全驱系统结构;
7、控制器构建模块:被配置为根据得到的全驱系统结构设计控制器,使得闭环系统转化为一个独立的高阶线性系统;设计自适应状态观测器,将观测值引入高阶动态估计项;
8、求解模块:被配置为求解控制器作为机器人的控制指令,以使得高阶辅助变量收敛,并且机器人系统的可驱动变量与非驱动变量能够渐近收敛于目标值。
9、一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成上述的基于全驱系统理论的欠驱动机器人自适应控制方法中的步骤。
10、一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成上述的基于全驱系统理论的欠驱动机器人自适应控制方法中的步骤。
11、与现有技术相比,本公开的有益效果为:
12、本公开中,有效利用了全驱系统模型特性与结构优势,并且无需精确的模型信息,巧妙地将线性系统控制的设计思路扩展至非线性欠驱动机器人,能够较为方便地改进控制器,在不影响机器人的闭环系统稳定性分析的前提下,直接有效地处理多种复杂工况下多输入多输出欠驱动机器人的实际共性问题,如状态时延,有利于提高欠驱动机器人的抗干扰性能、控制精度及工作效率,具有较好的实用价值与应用前景。
13、本公开的优点以及附加方面的优点将在下面的具体实施例中进行详细说明。
技术特征:
1.基于全驱系统理论的欠驱动机器人自适应控制方法,其特征在于:基于欠驱动机器人系统非线性动力学特性与耦合关系,将具有较强耦合关系的可驱动变量与非驱动变量动态组合到同一高阶辅助变量中,使欠驱动机器人的非线性动力学模型转化为关于该辅助变量的全驱系统结构,基于全驱系统理论对欠驱动机器人进行控制。
2.如权利要求1所述的基于全驱系统理论的欠驱动机器人自适应控制方法,其特征在于,包括如下步骤:
3.如权利要求2所述的基于全驱系统理论的欠驱动机器人自适应控制方法,其特征在于,包括如下步骤:
4.如权利要求2所述的基于全驱系统理论的欠驱动机器人自适应控制方法,其特征在于,包括如下步骤:基于动力学模型中可驱动变量及非驱动变量之间的非线性耦合关系,构建辅助变量的二阶导数与可驱动变量、非驱动变量及可驱动变量跟踪误差的非线性关系。
5.如权利要求2所述的基于全驱系统理论的欠驱动机器人自适应控制方法,其特征在于,包括如下步骤:基于可驱动变量的跟踪误差,将比例-微分结构引入高阶辅助变量,以实现高阶辅助变量渐近收敛。
6.如权利要求2所述的基于全驱系统理论的欠驱动机器人自适应控制方法,其特征在于:利用径向基函数神经网络,将高阶辅助变量的三阶导数中未知向量关于时间的导数进行近似表达。
7.如权利要求2所述的基于全驱系统理论的欠驱动机器人自适应控制方法,其特征在于,求解控制器的过程,包括如下步骤:
8.基于全驱系统理论的欠驱动机器人自适应控制系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成权利要求1-7任一项所述的基于全驱系统理论的欠驱动机器人自适应控制方法中的步骤。
10.一种计算机可读存储介质,其特征在于,用于存储计算机指令,所述计算机指令被处理器执行时,完成权利要求1-7任一项所述的基于全驱系统理论的欠驱动机器人自适应控制方法中的步骤。
技术总结
本公开涉及机器人控制技术领域,提出了一种基于全驱系统理论的欠驱动机器人自适应控制方法及系统,基于欠驱动机器人系统非线性动力学特性与耦合关系,将具有较强耦合关系的可驱动变量与非驱动变量动态组合到同一高阶辅助变量中,使欠驱动机器人的非线性动力学模型转化为关于该辅助变量的全驱系统结构,基于全驱系统理论对欠驱动机器人进行控制。有效利用了全驱系统模型特性与结构优势,并且无需精确的模型信息,巧妙地将线性系统控制的设计思路扩展至一类非线性欠驱动机器人,能够较为方便地改进控制器,在不影响机器人的闭环系统稳定性分析的前提下,有利于提高欠驱动机器人的抗干扰性能、控制精度及工作效率,具有较好的实用价值与应用前景。
技术研发人员:杨桐,孙宁,吴庆祥,方勇纯
受保护的技术使用者:南开大学深圳研究院
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!