移动机器人的控制方法、电子设备和计算机可读介质与流程
本申请实施例涉及计算机,具体涉及移动机器人的控制方法、电子设备和计算机可读介质。
背景技术:
1、随着slam(simultaneous localization and mapping,即时定位与地图构建)技术的发展,在越来越多的场景中需要进行高精定位。常用的定位方式可以包括二维码定位、激光雷达定位等。
2、现有技术中,在移动机器人通过二维码定位时,可通过解析二维码中的定位信息,来更新自身的定位信息。然而,在调度系统下发了错误路线、移动机器人未内置地图或内置的地图未更新、或者移动机器人运行异常等情况下,可能导致移动机器人按照非预期的路线移动,存在安全隐患。
技术实现思路
1、本申请实施例提出了移动机器人的控制方法、电子设备和计算机可读介质,以解决现有技术中移动机器人工作过程中存在安全隐患的技术问题。
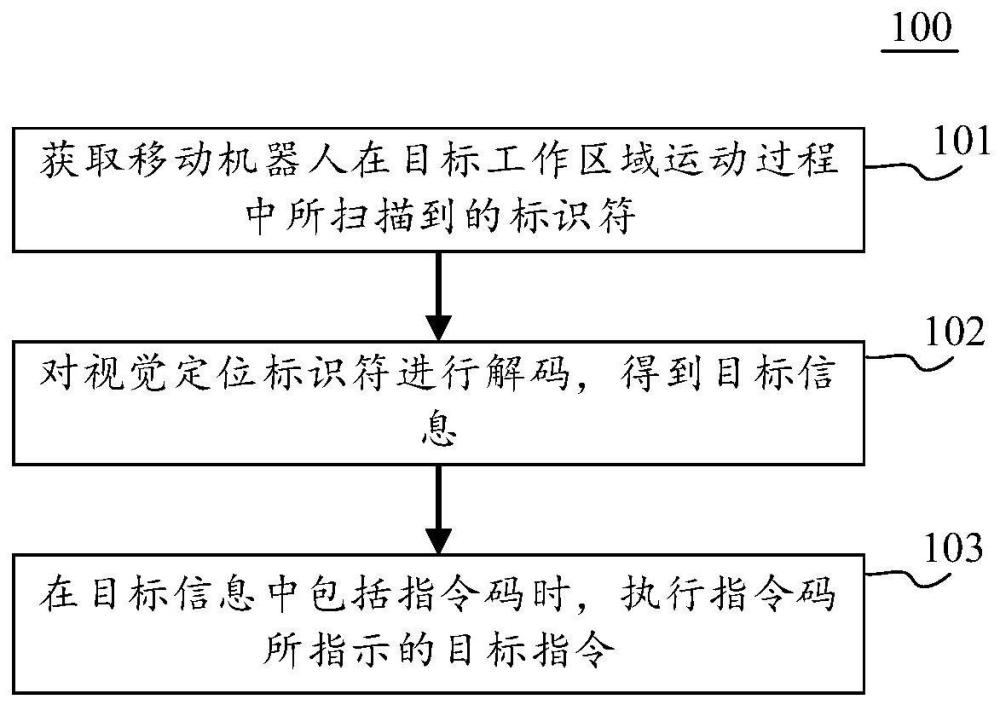
2、第一方面,本申请实施例提供了一种移动机器人的控制方法,该方法包括:获取所述移动机器人在目标工作区域运动过程中所扫描到的标识符;对所述标识符进行解码,得到目标信息;在所述目标信息中包括指令码时,执行所述指令码所指示的目标指令。
3、第二方面,本申请实施例提供了一种电子设备,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如第一方面所描述的移动机器人的控制方法。
4、第三方面,本申请实施例提供了一种计算机可读介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所描述的方法。
5、第四方面,本申请实施例提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面中所描述的方法。
6、本申请实施例提供的移动机器人的控制方法,通过获取移动机器人在目标工作区域运动过程中所扫描到的标识符,对标识符进行解码,得到目标信息,并在目标信息中包括指令码时,执行该指令码所指示的目标指令,从而能够在移动机器人工作过程中通过指令码对其进行控制。由于指令码具备更高的时效性,因此,在调度系统下发了错误路线、移动机器人未内置地图或内置的地图未更新、或者移动机器人运行异常等情况下,可避免移动机器人按照非预期的路线移动,从而能够在移动机器人工作过程中对其进行安全防护,提高了移动机器人的安全性。
技术特征:
1.一种移动机器人的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述目标工作区域中部署有第二类标识符和第三类标识符中的至少一种,以及,所述目标工作区域中还部署有第一类标识符;
3.根据权利要求2所述的方法,其特征在于,所述第二类标识符或所述第三类标识符添加至所述目标位置处;
4.根据权利要求2或3所述的方法,其特征在于,所述目标位置包括以下至少一种:
5.根据权利要求1-3任一项所述的方法,其特征在于,所述在所述目标信息中包括指令码时,执行所述指令码所指示的目标指令,包括:
6.根据权利要求1-3任一项所述的方法,其特征在于,所述在所述目标信息中包括指令码时,执行所述指令码所指示的目标指令,包括:
7.根据权利要求6所述的方法,其特征在于,所述对所述指令码进行解码,得到目标指令,包括:
8.根据权利要求1-3任一项所述的方法,其特征在于,所述执行所述目标指令,包括:
9.根据权利要求1-3任一项所述的方法,其特征在于,所述执行所述目标指令,包括:
10.一种电子设备,其特征在于,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1-9任一项所述的移动机器人的控制方法。
11.一种计算机可读介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-9中任一所述的方法。
12.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-9中任一所述的方法。
技术总结
本申请实施例公开了移动机器人的控制方法、电子设备和计算机可读介质。该方法的实施例包括:获取移动机器人在目标工作区域运动过程中所扫描到的标识符;对标识符进行解码,得到目标信息;在目标信息中包括指令码时,执行指令码所指示的目标指令。该实施方式能够在移动机器人工作过程中对其进行安全防护,提高了移动机器人的安全性。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京旷视机器人技术有限公司
技术研发日:
技术公布日:2024/7/9
- 还没有人留言评论。精彩留言会获得点赞!