一种用于核环境的同轴传动长杆机械手
本发明涉及核设施维护领域,特别是涉及一种用于核环境的同轴传动长杆机械手。
背景技术:
1、机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门;现有市面上在用机械手为气动式机械手,整体重量重,不便于单个作业人员进行打捞工作;
2、目前,公开号为cn217666398u的中国实用新型,公开了一种夹持机械手,包括杆套、连接杆和把手,杆套的第二端还设有固定夹爪,固定夹爪设置有朝向杆套的限位凹槽;连接杆穿设于杆套内,连接杆的第一端设置有手轮,连接杆的第二端设置有活动夹爪,活动夹爪位于固定夹爪与杆套的第二端之间,其中顺逆转动手轮,连接杆可沿连接杆的轴向往复移动;把手包括相对设置在杆套的第一端两侧的第一把手和第二把手;解决现有机械手重量大,不方便单人操作的问题;
3、然而在核电厂中采用水池冷却时,水池一般不做封顶,如有异物落入水池不及时打捞出来则会影响水循环从而将造成严重的工业事故;针对核电厂冷却水池的打捞工作,由于水池深度不同,或者异物掉落位置不同,现有的固定长度的夹持机械手无法满足多种场景下核电厂冷却水池的异物打捞工作。
技术实现思路
1、本发明的目的是提供一种用于核环境的同轴传动长杆机械手,其优点是结构简单、体积小巧、质量轻便,适合单人操作;能够根据需求调整机械手长度,满足多种场景下的核电厂冷却水池的异物打捞工作。
2、为实现上述目的及其他相关目的,本发明提供如下技术方案:
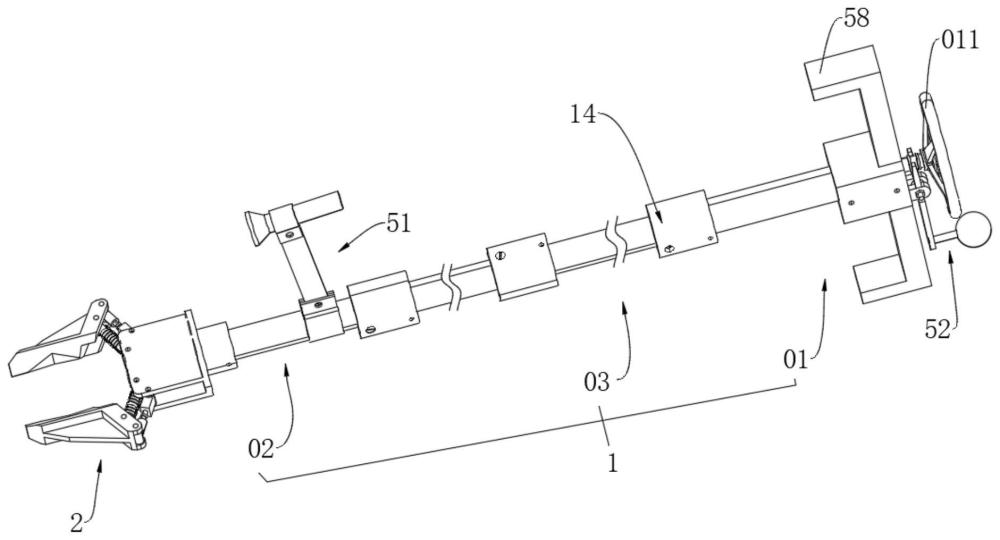
3、一种用于核环境的同轴传动长杆机械手,包括传动杆和与传动杆连接的夹爪机构;所述传动杆包括:
4、操作段,包括手轮、第一杆套和第一杆轴,所述手轮与第一杆轴固定连接,顺、逆时针旋转手轮以驱动第一杆轴转动连接在第一杆套内;
5、伸入段,包括联动架、第二杆套和第二杆轴,所述第一杆轴与第二杆轴传动连接,第二杆轴转动连接在第二杆套内,所述第二杆轴与联动架转动连接,联动架可沿的第二杆轴的轴向往复移动以驱动夹爪机构做开合运动;
6、过渡段,至少设置有一个过渡段连接在操作段和伸入段之间以调节传动杆长度;
7、所述过渡段包括与第一杆套和第二杆套连接的过渡杆套以及与第一杆轴和第二杆轴传动连接的过渡杆轴。
8、于本发明的一实施例中,所述过渡段与操作段和伸入段之间分别通过快速连接结构实现拆装;
9、所述快速连接结构包括相互匹配的a端接头和b端接头;所述操作段上设置为a端接头,所述伸入段上设置为b端接头;所述过渡段两端分别设置为a端接头和b端接头。
10、于本发明的一实施例中,所述a端接头包括管套组件、杆套施压组件以及杆轴连接组件;
11、所述管套组件包括连接杆套a、套设在连接杆套a上的管套、径向安装在管套上的定位销和限位销;所述限位销穿插在管套与连接杆套a上;
12、所述杆套施压组件包括与连接杆套a连接且轴向设置的施压弹簧以及与施压弹簧连接的顶销;
13、所述杆轴连接组件包括连接杆轴a、开设在连接杆轴a端面且轴向延伸的安装槽以及径向安装在连接杆轴a上的锁销;所述连接杆轴a圆周设置有环形槽,所述限位销延伸至环形槽内。
14、于本发明的一实施例中,所述b端接头包括连接杆套b以及连接杆轴b;
15、所述连接杆套b圆周设置有导向槽,所述导向槽连接有与定位销插接的定位槽;
16、所述连接杆轴b与安装槽仿形,所述连接杆轴b上开设有销槽,所述连接杆轴b插设在安装槽内,所述锁销插接在销槽内。
17、于本发明的一实施例中,所述定位销与管套之间以及锁销与连接杆轴a之间均设置有弹簧。
18、于本发明的一实施例中,所述第二杆轴同轴连接有螺纹套;所述联动架包括穿设在螺纹套内且与螺纹套啮合连接的拉杆以及与拉杆固定连接的连杆架;
19、所述夹爪机构包括安装架以及若干铰接在安装架上的夹爪;所述安装架固定连接在第二杆套一端,所述螺纹套与安装架转动连接;所述拉杆一端穿过安装架且与连杆架连接。
20、于本发明的一实施例中,所述夹爪包括第一连杆、第一调节连杆、第二调节连杆以及手爪;
21、所述第一连杆一端与连杆架铰接、另一端与第一调节连杆端部铰接;
22、所述第一调节连杆和第二调节连杆且分别与安装架和手爪铰接。
23、于本发明的一实施例中,所述第一调节连杆包括与手爪铰接的直杆、与安装架和连杆架铰接的弯杆以及两端分别与直杆与弯杆啮合连接的螺杆;
24、所述第二调节连杆包括与手爪铰接的凹杆、与安装架铰接且穿插进凹杆的凸杆以及套设在凹杆和凸杆上的调节弹簧;
25、所述调节弹簧的两端分别固定在凸杆和凹杆上。
26、于本发明的一实施例中,还包括观测机构,所述观测机构包括摄像头组件和拨动组件;
27、所述摄像头组件包括固定在第二杆套上的管箍、与管箍铰接的支撑架以及固定在支撑架上的摄像头;
28、所述第二杆轴圆周呈环形布设有下齿条,所述支撑架底部为圆弧形结构,所述支撑架底部沿弧形设置有与下齿条啮合的上齿条。
29、于本发明的一实施例中,靠近所述手轮一侧的第一杆套上固定设置有把手架;
30、所述拨动组件包括铰接在把手架上的拨杆、与拨杆固定连接的拨动手柄;
31、所述第一杆轴圆周上设置有限位槽,所述拨杆一端套设在限位槽内。
32、如上所述,本发明的一种用于核环境的同轴传动长杆机械手,具有以下有益效果:
33、1.结构简单、体积小巧、质量轻便、便携带、适合单人操作;
34、2.能够根据需求在操作段和伸入段之间串接不同长度和数量的过渡段可以适用不同水深,满足多种场景下的核电厂冷却水池的异物打捞工作;
35、3.过渡段与操作段和伸入段之间连接简便,速度快,减少操作人员接受辐射时间;
36、4.螺纹套与拉杆通过螺纹提供自锁,从而提高手爪的锁紧力。
技术特征:
1.一种用于核环境的同轴传动长杆机械手,其特征在于:包括传动杆(1)和与传动杆(1)连接的夹爪机构(2);所述传动杆(1)包括:
2.根据权利要求1所述的一种用于核环境的同轴传动长杆机械手,其特征在于:所述过渡段(03)与操作段(01)和伸入段(02)之间分别通过快速连接结构(14)实现拆装;
3.根据权利要求2所述的一种用于核环境的同轴传动长杆机械手,其特征在于:所述a端接头(141)包括管套组件(411)、杆套施压组件(412)以及杆轴连接组件(413);
4.根据权利要求3所述的一种用于核环境的同轴传动长杆机械手,其特征在于:所述b端接头包括连接杆套b(1421)以及连接杆轴b(1422);
5.根据权利要求3所述的一种用于核环境的同轴传动长杆机械手,其特征在于:所述定位销(4113)与管套(4112)之间以及锁销(4133)与连接杆轴a(4131)之间均设置有弹簧。
6.根据权利要求1所述的一种用于核环境的同轴传动长杆机械手,其特征在于:所述第二杆轴(023)同轴连接有螺纹套(35);所述联动架(021)包括穿设在螺纹套(35)内且与螺纹套(35)啮合连接的拉杆(0211)以及与拉杆(0211)固定连接的连杆架(0212);
7.根据权利要求6所述的一种用于核环境的同轴传动长杆机械手,其特征在于:所述夹爪(202)包括第一连杆(0221)、第一调节连杆(0222)、第二调节连杆(0223)以及手爪(0224);
8.根据权利要求7所述的一种用于核环境的同轴传动长杆机械手,其特征在于:所述第一调节连杆(0222)包括与手爪(0224)铰接的直杆(44)、与安装架(201)和连杆架(0212)铰接的弯杆(45)以及两端分别与直杆(44)与弯杆(45)啮合连接的螺杆(46);
9.根据权利要求1所述的一种用于核环境的同轴传动长杆机械手,其特征在于:还包括观测机构,所述观测机构包括摄像头组件(51)和拨动组件(52);
10.根据权利要求9所述的一种用于核环境的同轴传动长杆机械手,其特征在于:靠近所述手轮(011)一侧的第一杆套(012)上固定设置有把手架(58);
技术总结
本发明提供一种用于核环境的同轴传动长杆机械手,应用在核设施维护领域,其技术方案要点是:包括传动杆、夹爪机构和观测机构;传动杆包括:操作段,包括手轮、第一杆套和第一杆轴,手轮与第一杆轴固定连接,顺、逆时针旋转手轮以驱动第一杆轴转动连接在第一杆套内;伸入段,包括联动架、第二杆套和第二杆轴,第二杆轴与联动架转动连接,联动架可沿的第二杆轴的轴向往复移动以驱动夹爪机构做开合运动;过渡段,至少设置有一个过渡段连接在操作段和伸入段之间以调节传动杆长度;具有的技术效果是:结构简单、体积小巧、质量轻便,适合单人操作;能够根据需求调整机械手长度,满足多种场景下的核电厂冷却水池的异物打捞工作。
技术研发人员:罗黎,李志梅,曾鹏伟,余心怡,龚禹成
受保护的技术使用者:沙洲职业工学院
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!