一种自主移动式机器人的制作方法
本发明涉及移动机器人,尤其是指一种自主移动式机器人。
背景技术:
1、在医药、3c和半导体行业,物料搬运是一项比较日常的工作,可以贯穿整个生产制造、仓储环节、运输环节甚至是实验室内。利用amr机器人可以将物料高效、精准地完成点对点的搬运作业,实现精细化、柔性化、信息化、缩短物流时间、降低成本等。
2、在医药、3c和半导体行业,由于生产物料属于特殊商品,各个环节包括安全保密、无菌(医药)、洁净度、人员、设备等方面都需要进行严格把关,因此车间内需要布设专门的安全设施、无菌室(医药)、隔离门、无菌包装(医药)、无尘通道等辅助设施,才能满足物料转运的严格要求。而专门的agv机器人可以满足用户对特定生产环境的特殊要求,不需要专门的辅助设施即可保证其在车间内实现对药物、芯片、电子产品等安全可靠的运输,减少运输过程中受微粒和微生物带来的影响,大大消除污染的风险。
3、现阶段设有卷帘门的机器人所配备的卷帘机构为电动卷帘门,一般电动卷帘门包括卷轴、门帘以及驱动所述门帘打开或者关闭的转动电机,转动电机与控制模块连接,控制模块控制转动电机正转或反转,从而带动卷轴正转或反转,进而卷轴带动门帘打开或关闭。
4、当电动卷帘门的正常工作需要稳定的电源电压,如果电源电压不稳定,就会导致门体欠压无法正常工作。此外,一些电动卷帘门配备了电池供电系统,当电池功率不足时,门体也会出现欠压问题。
5、并且,电动卷帘门的配件会随着使用时间的延长而老化,例如电磁铁、传感器等配件,如果出现老化问题,也会导致卷帘门欠压无法正常工作。
6、由上述可知,现有的卷帘机构防护能力较低,无法满足现有运输特殊商品的严格要求。
技术实现思路
1、针对现有技术的不足,本发明公开了一种自主移动式机器人。
2、本发明所采用的技术方案如下:
3、一种自主移动式机器人,包括:
4、移动主体;
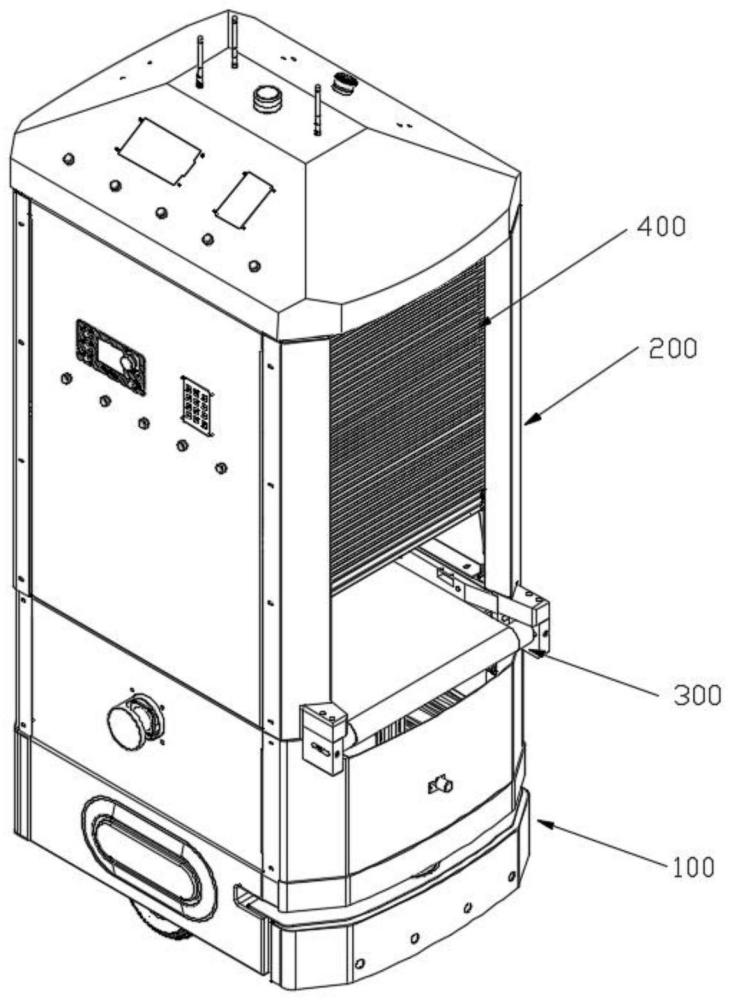
5、缓存主体,设于所述移动主体上;所述缓存主体的一侧开口,并沿水平深度方向延伸形成缓存空间;
6、缓存机构,沿所述缓存空间的深度方向水平设于所述缓存空间的底部;
7、自动门装置,包括设于所述缓存主体开口处的卷帘组件、设于所述缓存主体顶部的驱动组件以及连接所述驱动组件和所述卷帘组件的牵引组件;所述卷帘组件包括设于所述缓存主体开口处的卷帘,所述卷帘的顶部卷绕收容于所述缓存空间内,所述卷帘的底部沿所述缓存主体的开口向下延展;所述牵引组件包括至少一组联动设置的第一牵引组件和第二牵引组件,所述第一牵引组件和所述第二牵引组件均与所述卷帘的底部连接,在所述驱动组件的正反向驱动下,所述第一牵引组件和所述第二牵引组件分别为所述卷帘提供升降方向的牵引力。
8、在本发明的一个实施例中,所述缓存机构包括缓存支架、第一安装块、第二安装块、第一辊筒、第二辊筒和输送带;所述第一安装块安装于所述缓存支架的外端,以使所述缓存机构延伸出所述缓存主体;所述第二安装块安装于所述缓存支架的内端;所述第一辊筒的两端可调的安装于所述第一安装块;所述第二辊筒的两端安装于所述第二安装块;所述输送带张紧于所述第一辊筒和所述第二辊筒。
9、在本发明的一个实施例中,所述第一安装块水平开有腰形孔以及与腰形孔连通的通孔,所述第一辊筒的两端插于所述腰形孔内,所述通孔内插有调节螺栓,所述调节螺栓与所述第一辊筒的端部螺纹连接。
10、在本发明的一个实施例中,所述卷帘包括多个依次铰接设置的卷帘单元;所述卷帘单元包括可弯曲变形的主体部,设于所述主体部顶部或底部的转轴部,远离所述转轴部设于所述主体部底部或顶部的轴套部,以及多个设于所述主体部外侧的延展部;各所述卷帘单元的转轴部与相邻的卷帘单元的轴套部同轴转动配合;所述延展部被设置为当所述主体部向远离所述延展部一侧弯曲变形时,所述延展部相互扩张远离;当所述主体部恢复平展状态时,所述延展部收容并相互支撑。
11、在本发明的一个实施例中,所述延展部的截面为l形,并在所述延展部和所述主体部之间形成多个形变空间。
12、在本发明的一个实施例中,所述卷帘组件还包括沿所述缓存主体的开口宽度方向对称设于开口内侧的两组引导侧板和引导立柱;所述引导侧板设于所述缓存主体内部靠近顶部的位置,所述引导侧板相对的侧面分别开有收容轨道,在所述卷帘上升过程中,所述卷帘的边缘可以沿所述收容轨道卷绕;所述引导立柱相对的侧面开有竖直方向的引导轨道,所述卷帘两侧边水平延伸至所述引导轨道内。
13、在本发明的一个实施例中,所述收容轨道为螺旋槽型;所述收容轨道在水平方向的延展空间大于其在竖直方向的延展空间。
14、在本发明的一个实施例中,所述第一牵引组件包括第一定滑轮组,第一动滑轮和第一牵引绳,所述第一定滑轮组安装于所述缓存主体;所述第一动滑轮安装于所述驱动组件;所述第一牵引绳的一端被固定于所述缓存主体顶部远离开口的一侧,所述第一牵引绳的另一端绕于所述第一动滑轮后,通过所述第一定滑轮组引导并与所述卷帘的底部固定连接;所述第二牵引组件包括第二定滑轮组、第二动滑轮和第二牵引绳;所述第二定滑轮组安装于所述缓存主体;所述第二动滑轮安装于所述驱动组件;所述第二牵引绳的一端被固定于所述缓存主体顶部靠近开口的一侧,所述第二牵引绳的另一端绕于所述第二动滑轮后,通过所述第二定滑轮组引导与所述卷帘的底部固定连接。
15、在本发明的一个实施例中,所述驱动组件包括沿所述缓存空间的深度方向水平设于所述缓存主体上的丝杠机构,与所述丝杠机构连接的驱动电机,以及设于丝杠机构的丝杠螺母上的安装支架;所述第一动滑轮和所述第二动滑轮同轴设置于所述安装支架上。
16、在本发明的一个实施例中,所述牵引组件包括两组第一牵引组件和第二牵引组件,两组所述第一牵引组件和所述第二牵引组件连接同一所述驱动组件,并沿所述缓存主体的宽度方向对称分设于所述驱动组件的两侧。
17、本发明的上述技术方案相比现有技术具有以下优点:
18、本发明所述的自主移动式机器人带有特殊设计的自动门装置,防盗防偷窥,实现保密转运;同时保证自主移动式机器人内部存储空间与外界环境隔离,保证内部洁净,兼具防盗以及防护等安全功能。
19、本发明所述的自主移动式机器人在驱动组件的正反向驱动下,联动的第一牵引组件和第二牵引组件分别能为卷帘提供升降方向的牵引力,卷帘收放过程中的速度一致即卷帘收放过程中为匀速,避免现有技术采用辊筒卷帘造成卷帘收放时速度前后不一致的情况,降低速度较快时的磨损,以及位置控制。
技术特征:
1.一种自主移动式机器人,其特征在于,包括:
2.根据权利要求1所述的自主移动式机器人,其特征在于,所述缓存机构(300)包括缓存支架(301)、第一安装块(302)、第二安装块(303)、第一辊筒(304)、第二辊筒(305)和输送带(306);所述第一安装块(302)安装于所述缓存支架(301)的外端,以使所述缓存机构(300)延伸出所述缓存主体(200);所述第二安装块(303)安装于所述缓存支架(301)的内端;所述第一辊筒(304)的两端可调的安装于所述第一安装块(302);所述第二辊筒(305)的两端安装于所述第二安装块(303);所述输送带(306)张紧于所述第一辊筒(304)和所述第二辊筒(305)。
3.根据权利要求2所述的自主移动式机器人,其特征在于,所述第一安装块(302)水平开有腰形孔(3021)以及与腰形孔(3021)连通的通孔(3022),所述第一辊筒(304)的两端插于所述腰形孔(3021)内,所述通孔(3022)内插有调节螺栓(307),所述调节螺栓(307)与所述第一辊筒(304)的端部螺纹连接。
4.根据权利要求1所述的自主移动式机器人,其特征在于,所述卷帘包括多个依次铰接设置的卷帘单元(504);所述卷帘单元(504)包括可弯曲变形的主体部(5041),设于所述主体部(5041)顶部或底部的转轴部(5042),远离所述转轴部(5042)设于所述主体部(5041)底部或顶部的轴套部(5043),以及多个设于所述主体部(5041)外侧的延展部(5044);各所述卷帘单元(504)的转轴部(5042)与相邻的卷帘单元(504)的轴套部(5043)同轴转动配合;所述延展部(5044)被设置为当所述主体部(5041)向远离所述延展部(5044)一侧弯曲变形时,所述延展部(5044)相互扩张远离;当所述主体部(5041)恢复平展状态时,所述延展部(5044)收容并相互支撑。
5.根据权利要求4所述的自主移动式机器人,其特征在于,所述延展部(5044)的截面为l形,并在所述延展部(5044)和所述主体部(5041)之间形成多个形变空间(505)。
6.根据权利要求1所述的自主移动式机器人,其特征在于,所述卷帘组件(500)还包括沿所述缓存主体(200)的开口宽度方向对称设于开口内侧的两组引导侧板(501)和引导立柱(502);所述引导侧板(501)设于所述缓存主体(200)内部靠近顶部的位置,所述引导侧板(501)相对的侧面分别开有收容轨道(5011),在所述卷帘(503)上升过程中,所述卷帘(503)的边缘可以沿所述收容轨道(5011)卷绕;所述引导立柱(502)相对的侧面开有竖直方向的引导轨道(5021),所述卷帘(503)两侧边水平延伸至所述引导轨道(5021)内。
7.根据权利要求6所述的自主移动式机器人,其特征在于,所述收容轨道(5011)为螺旋槽型;所述收容轨道(5011)在水平方向的延展空间大于其在竖直方向的延展空间。
8.根据权利要求1所述的自主移动式机器人,其特征在于,所述第一牵引组件(701)包括第一定滑轮组,第一动滑轮(7011)和第一牵引绳(7016),所述第一定滑轮组安装于所述缓存主体(200);所述第一动滑轮(7011)安装于所述驱动组件(600);所述第一牵引绳(7016)的一端被固定于所述缓存主体(200)顶部远离开口的一侧,所述第一牵引绳(7016)的另一端绕于所述第一动滑轮(7011)后,通过所述第一定滑轮组引导并与所述卷帘(503)的底部固定连接;所述第二牵引组件(702)包括第二定滑轮组、第二动滑轮(7021)和第二牵引绳(7025);所述第二定滑轮组安装于所述缓存主体(200);所述第二动滑轮(7021)安装于所述驱动组件(600);所述第二牵引绳(7025)的一端被固定于所述缓存主体(200)顶部靠近开口的一侧,所述第二牵引绳(7025)的另一端绕于所述第二动滑轮(7021)后,通过所述第二定滑轮组引导与所述卷帘(503)的底部固定连接。
9.根据权利要求8所述的自主移动式机器人,其特征在于,所述驱动组件(600)包括沿所述缓存空间的深度方向水平设于所述缓存主体(200)上的丝杠机构(601),与所述丝杠机构(601)连接的驱动电机(602),以及设于丝杠机构(601)的丝杠螺母上的安装支架;所述第一动滑轮(7011)和所述第二动滑轮(7021)同轴设置于所述安装支架上。
10.根据权利要求1所述的自主移动式机器人,其特征在于,所述牵引组件(700)包括两组第一牵引组件(701)和第二牵引组件(702),两组所述第一牵引组件(701)和所述第二牵引组件(702)连接同一所述驱动组件(600),并沿所述缓存主体(200)的宽度方向对称分设于所述驱动组件(600)的两侧。
技术总结
本发明涉及一种自主移动式机器人,包括:移动主体;缓存主体,设于移动主体上;缓存主体的一侧开口,并沿水平深度方向延伸形成缓存空间;缓存机构,沿缓存空间的深度方向水平设于缓存空间的底部;自动门装置,包括设于缓存主体开口处的卷帘组件、设于缓存主体顶部的驱动组件以及连接驱动组件和卷帘组件的牵引组件;卷帘组件包括设于缓存主体开口处的卷帘,卷帘的顶部卷绕收容于缓存空间内,卷帘的底部沿缓存主体的开口向下延展;牵引组件包括至少一组联动设置的第一牵引组件和第二牵引组件,第一牵引组件和第二牵引组件均与卷帘的底部连接。本发明在驱动组件的正反向驱动下,第一牵引组件和第二牵引组件分别能为卷帘提供升降方向的牵引力。
技术研发人员:付林霄,王宏军,李国
受保护的技术使用者:苏州玖物智能科技股份有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!