一种应用于智慧园区的安防巡逻机器人系统的制作方法
本申请涉及巡逻机器人,更具体地说,涉及一种应用于智慧园区的安防巡逻机器人系统。
背景技术:
1、安防巡逻机器人通过集成多种技术和功能,以实现对安全领域的巡逻和监控。以下是一些常见的实现安防的方法:
2、监控摄像技术:集成高清摄像头和监控系统,使机器人能够实时监测周围环境。智能监控系统可以识别异常行为、人员或物体,及时发出警报。
3、红外或夜视技术:集成红外传感器或夜视摄像头,以确保机器人在低光或夜间条件下仍能有效工作。这有助于提高夜间安全监控的效果。
4、传感器技术:整合各种传感器,如温度、湿度、烟雾、气体等传感器,以检测环境中的异常情况,如火灾、泄漏等。
5、巡逻路径规划:使用先进的自主导航技术,如激光雷达、视觉导航等,使机器人能够自主规划巡逻路径,避开障碍物,高效巡逻。
6、紧急响应功能:集成紧急按钮或系统,使机器人能够在发现紧急情况时迅速响应,触发警报或请求支援。
7、这些技术的综合运用可以使安防巡逻机器人更加智能、高效地执行巡逻任务,为安全领域提供可靠的监控和响应能力。
8、现有技术公开号为cn110434868a的文献提供一种安防巡逻用机器人,该装置通过添加了安装座、警报器、开关按钮、推块、外卡环、钢化玻璃罩、牛眼滚珠、移动套、弹簧一、固定环以及导向杆,便于对摄像头进行防护,提高了安全性。添加了凸台、固定支架、电动推杆、移动块、弹簧二、支杆、移动筒、支板、弧形杆、微型电机、清洁棉条以及转轴,便于对钢化玻璃罩进行清洁,从而提高摄像头摄像的清晰度。
9、上述中的现有技术方案虽然通过现有技术的结构可以实现与有关的有益效果,但是仍存在以下缺陷;该装置在进行使用时,实现了对摄像头的自动清洁,但是在机器人巡逻的过程中,会遇到各种垃圾,由于该机器人不便于对地面上的垃圾进行清理,导致其功能较为单一,实用性较差,
10、鉴于此,我们提出一种应用于智慧园区的安防巡逻机器人系统。
技术实现思路
1、1.要解决的技术问题
2、本申请的目的在于提供一种应用于智慧园区的安防巡逻机器人系统,解决了上述背景技术中提出的技术问题,实现了便于对地面上的垃圾进行清理的技术效果。
3、2.技术方案
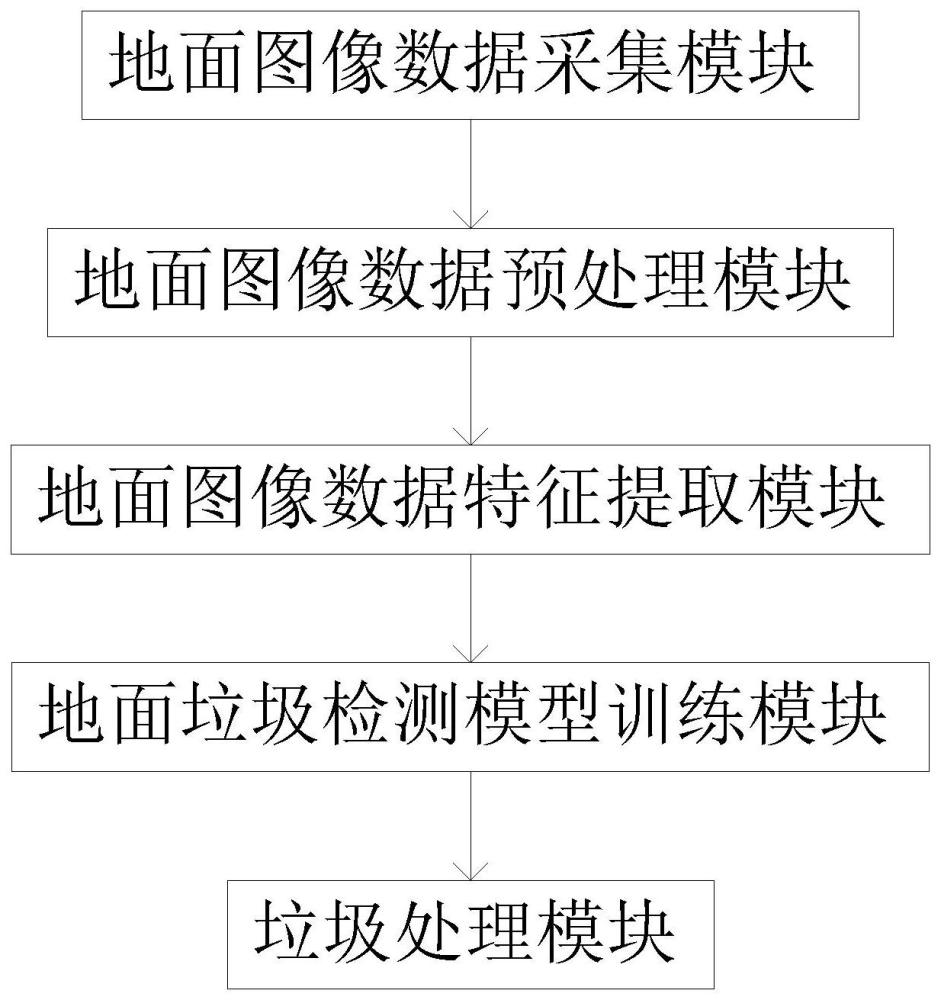
4、本申请实施例提供了一种应用于智慧园区的安防巡逻机器人系统,包括:地面图像数据采集模块、地面图像数据预处理模块、地面图像数据特征提取模块、地面垃圾检测模型训练模块、垃圾处理模块,
5、地面图像数据采集模块:所述地面图像数据采集模块通过安装在安防巡逻机器人上的高清摄像设备,采集园区地面的实时视频流;
6、地面图像数据预处理模块:所述地面图像数据预处理模块对采集的视频图像进行预处理,提高视频图像质量,便于特征的提取;
7、地面图像数据特征提取模块:所述地面图像数据特征提取模块从采集的视频流中,提取与地面垃圾相关的特征,如颜色、形状、纹理等;
8、地面垃圾检测模型训练模块:所述地面垃圾检测模型训练模块利用提取的特征,训练一个深度学习模型,该模型可以识别不同类型的垃圾;
9、垃圾处理模块:所述垃圾处理模块控制安防巡逻机器人按照规划的路径,对地面垃圾进行清理。
10、作为本申请文件技术方案的一种可选方案,所述地面图像数据采集模块通过安装在安防巡逻机器人上的高清摄像设备,采集园区地面的实时视频流,将采集到的实时视频流传输到后端服务器进行存储,传输过程中应保证视频数据的完整性和安全性,防止数据丢失或被篡改。
11、作为本申请文件技术方案的一种可选方案,所述地面图像数据预处理模块对采集的视频图像进行预处理,提高视频图像质量,便于特征的提取,包括噪声去除、对比度增强、背景去除,所述噪声去除:视频中可能存在一些噪声,如电子噪声、运动模糊等,噪声去除可以有效地提高视频的清晰度,使图像更加平滑;
12、所述对比度增强:如果视频的对比度不足,会导致图像看起来比较平淡,通过对比度增强,可以增加图像的动态范围,使图像更加鲜明;
13、所述背景去除:对于需要突出前景物体的视频,可以使用背景去除技术来消除背景,使前景物体更加突出。
14、作为本申请文件技术方案的一种可选方案,所述地面图像数据特征提取模块从采集的视频流中,提取与地面垃圾相关的特征,如颜色、形状、纹理等,所述颜色分割与识别:使用颜色分割算法(如hsv色彩空间分割),将图像分割为不同的颜色区域,并根据颜色信息识别不同类型的垃圾;
15、所述形状分析:使用边缘检测算法(如canny边缘检测)来识别垃圾的轮廓,并分析其形状特征;
16、所述纹理分析:使用纹理分析算法如灰度共生矩阵来识别和提取垃圾表面的纹理特征。
17、作为本申请文件技术方案的一种可选方案,所述地面垃圾检测模型训练模块利用提取的特征,训练一个卷积神经网络的深度学习模型,该模型可以识别不同类型的垃圾,通过将实时视频流输入到训练好的模型中,安防巡逻机器人自动识别地面垃圾的种类。
18、作为本申请文件技术方案的一种可选方案,所述垃圾处理模块根据识别的垃圾种类和位置控制安防巡逻机器人按照规划的路径,对地面垃圾进行清理,将清扫结果实时反馈给智慧园区的管理系统,以便进行后续的维护和管理。
19、3.有益效果
20、本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
21、1.本申请由于采用了地面图像数据采集模块等技术手段,所以有效解决了现有技术中的技术问题,进而实现了在机器人进行巡逻的同时,对地面进行图像的采集,然后通过地面垃圾检测模型对垃圾进行识别,实现机器人在进行巡逻安防的同时对地面上的垃圾进行识别,实现清理垃圾的作用的效果。
22、2.本申请通过设置可调罩,在电推杆的作用下,能够使得可调罩罩在垃圾上,然后在传动机构的作用下,实现带动刷杆进行转动,扫起垃圾,同时带动扇叶转动,将垃圾抽吸到收集座内进行收集处理,实现装置具有清洁垃圾的功能,实现装置的功能多样化的作用。
23、3.本申请通过设置防堵机构,能够实现在利用滤网对垃圾进行过滤时,通过带动往复丝杆转动,从而使得防堵架往复移动,对滤网上的垃圾进行刮下,避免堵塞滤网,影响垃圾的收集。
技术特征:
1.一种应用于智慧园区的安防巡逻机器人系统,包含:地面图像数据采集模块、地面图像数据预处理模块、地面图像数据特征提取模块、地面垃圾检测模型训练模块、垃圾处理模块,其特征在于:
2.根据权利要求1所述的应用于智慧园区的安防巡逻机器人系统,其特征在于:所述地面图像数据采集模块通过安装在安防巡逻机器人上的高清摄像设备,采集园区地面的实时视频流,将采集到的实时视频流传输到后端服务器进行存储,传输过程中应保证视频数据的完整性和安全性,防止数据丢失或被篡改。
3.根据权利要求1所述的应用于智慧园区的安防巡逻机器人系统,其特征在于:所述地面图像数据预处理模块对采集的视频图像进行预处理,提高视频图像质量,便于特征的提取,包括噪声去除、对比度增强、背景去除,所述噪声去除:视频中可能存在一些噪声,如电子噪声、运动模糊等,噪声去除可以有效地提高视频的清晰度,使图像更加平滑;
4.根据权利要求1所述的应用于智慧园区的安防巡逻机器人系统,其特征在于:所述地面图像数据特征提取模块从采集的视频流中,提取与地面垃圾相关的特征,如颜色、形状、纹理等,所述颜色分割与识别:使用颜色分割算法,将图像分割为不同的颜色区域,并根据颜色信息识别不同类型的垃圾;
5.根据权利要求1所述的应用于智慧园区的安防巡逻机器人系统,其特征在于:所述地面垃圾检测模型训练模块利用提取的特征,训练一个卷积神经网络的深度学习模型,该模型可以识别不同类型的垃圾,通过将实时视频流输入到训练好的模型中,安防巡逻机器人自动识别地面垃圾的种类。
6.根据权利要求1所述的应用于智慧园区的安防巡逻机器人系统,其特征在于:所述垃圾处理模块根据识别的垃圾种类和位置控制安防巡逻机器人按照规划的路径,对地面垃圾进行清理,将清扫结果实时反馈给智慧园区的管理系统,以便进行后续的维护和管理。
技术总结
本申请公开了一种应用于智慧园区的安防巡逻机器人系统,包括:地面图像数据采集模块、地面图像数据预处理模块、地面图像数据特征提取模块、地面垃圾检测模型训练模块、垃圾处理模块,采用了地面图像数据采集模块等技术手段,进而实现了在机器人进行巡逻的同时,然后通过地面垃圾检测模型对垃圾进行识别,实现机器人在进行巡逻安防的同时对地面上的垃圾进行识别,实现清理垃圾的作用的效果,通过设置可调罩,在电推杆的作用下,能够使得可调罩罩在垃圾上,然后在传动机构的作用下,实现带动刷杆进行转动,扫起垃圾,同时带动扇叶转动,将垃圾抽吸到收集座内进行收集处理,实现装置具有清洁垃圾的功能,实现装置的功能多样化的作用。
技术研发人员:陈力
受保护的技术使用者:成都恒飞致远科技有限公司
技术研发日:
技术公布日:2024/6/26
- 还没有人留言评论。精彩留言会获得点赞!