一种巡检轨道机器人自适应行走装置的制作方法
本发明属于轨道机器人,尤其涉及一种巡检轨道机器人自适应行走装置。
背景技术:
1、巡检轨道机器人是指沿着设定移动路径进行巡检移动并且在巡检移动的过程中完成巡检操作的轨道式机器人,当前已经广泛应用于工矿企业。巡检轨道机器人通常沿工字轨道确定的特定路径行驶移动,在移动的过程中完成巡检作业内容。轨道机器人需要配置行走装置,行走装置与工字轨道配合,实现轨道机器人的行走驱动、导向以及承重等功能。
2、实际应用中,作为轨道机器人移动路径的轨道并非都是平直的,根据现场工况的不同也可以具有弯度和坡度,轨道机器人在轨道弯度位置调整移动方向、在轨道坡度位置调整高度。因此,为轨道机器人配置的行走装置应该具备在带弯度及坡度工字轨道上稳定移动的能力,行走装置应该能够良好地跟踪工字轨道的弯度及坡度变化,在提供稳定驱动、导向及承重功能的基础上,避免在行驶移动的过程中出现卡阻问题,保证轨道机器人移动的顺畅性和稳定性。
3、现有巡检轨道机器人的行走装置对工字轨道弯度及坡度的跟踪适应能力较弱,由于行走装置在轨道弯度和坡度变化的位置无法自适应到最佳的姿态,通常导致移动卡阻或者移动阻力增大问题。综上,需要对巡检轨道机器人的行走装置进行结构方面的优化设计,提升对轨道弯度及坡度变化的适应能力。
技术实现思路
1、本发明的目的是:提供一种巡检轨道机器人自适应行走装置,提升对轨道弯度及坡度变化的适应能力,提升巡检轨道机器人移动的顺畅性和稳定性。
2、本发明采取的技术方案是:一种巡检轨道机器人自适应行走装置,包括基板,在基板的中部安装有驱动组件和向驱动组件输出动力的驱动机,在驱动组件的一侧设有承重导向组件、另一侧设有承重导向清扫组件;驱动组件包括可横向移位的驱动轴座,在驱动轴座的输出轴上安装有驱动轮,在驱动轴座上连接有在横向移动方向提供拉力的拉簧,还包括调节拉簧的张紧程度的调节机构以及将驱动机的驱动作用传递给驱动轴座的传动机构;承重导向组件包括可水平回转转动的、v形的第一承重轮架,在第一承重轮架的顶部内侧安装有相对的第一承重轮和第二承重轮,在第一承重轮架的一侧顶部安装有第一导向轮支架,在第一导向轮支架的两端分别安装有第一导向轮和第二导向轮且第一导向轮和第二导向轮分别位于本侧承重轮的两侧;承重导向清扫组件包括可水平回转转动的、v形的第二承重轮架,在第二承重轮架的顶部内侧安装有相对的第三承重轮和第四承重轮,在第二承重轮架的一侧顶部安装有第二导向轮支架,在第二导向轮支架的两端分别安装有第三导向轮和第四导向轮且第三导向轮和第四导向轮分别位于本侧承重轮的两侧;在第二承重轮架的顶部外侧分别安装有第一传动盒和第二传动盒,在第一传动盒的输出轴下端安装有第一清扫毛刷,在第二传动盒的输出轴下端安装有第二清扫毛刷;在第一传动盒的内侧还安装有第一摆动限位器,在第二传动盒的内侧还安装有第二摆动限位器。
3、优选地,驱动组件包括安装在基板中部的两个导轨,在两个导轨上安装有轨道块,驱动轴座安装固定在两个轨道块之间。
4、优选地,驱动组件的调节机构包括相对设置的两组光杠以及安装在光杠上的滑块,拉簧的一端与驱动轴座的侧部固定连接、另一端与本侧的滑块固定连接;在光杠上还安装有调节螺栓,在滑块的中部设有螺纹孔且调节螺栓位于螺纹孔内。
5、优选地,驱动组件的传动机构包括安装在基板上的传动箱,驱动机的输出轴与传动箱的输入轴对接连接,传动箱的输出轴与驱动轴座的驱动轴采用伸缩型联轴器对接连接。
6、优选地,承重导向组件还包括与基板固定连接的第一承重轴座且在第一承重轴座内安装有第一承重转轴,第一承重轮架的中部与第一承重转轴固定连接。
7、优选地,在第一承重轮架的一侧外部还安装有编码器,编码器的输入轴与本侧的承重轮轮轴对接连接。
8、优选地,承重导向清扫组件还包括与基板固定连接的第二承重轴座且在第二承重轴座内安装有第二承重转轴,第二承重轮架的中部与第二承重转轴固定连接。
9、优选地,第一传动盒与第二传动盒的结构相同,均包括传动盒盒体及传动盒盒盖,在传动盒盒体内安装有传动齿轮、同轴的主动齿轮和主动带轮以及从动带轮,传动齿轮与本侧承重轮的轮轴外端连接,传动齿轮与主动齿轮啮合传动,主动带轮与从动带轮采用皮带传动连接。
10、优选地,在第一传动盒的端部内侧安装有第一清扫轴座,在第二传动盒的端部内侧安装有第二清扫轴座,第一传动盒的从动带轮轮轴与第一清扫轴座的输出轴采用锥齿轮组传动,第二传动盒的从动带轮轮轴与第二清扫轴座的输出轴采用锥齿轮组传动。
11、优选地,在第一传动盒的根部与第二承重轮架之间、第二传动盒的根部与第二承重轮架之间均安装有扭簧;第一摆动限位器和第二摆动限位器两者的结构相同,均包括限位支架以及安装在限位支架顶端的限位轮,限位支架的底端与本侧传动盒的传动盒盒体固定连接。
12、本发明的优点和积极效果是:本发明提供了一种结构设计合理的巡检轨道机器人自适应行走装置,通过设置驱动组件及驱动机而具备与轨道结合进行驱动移动的能力,通过在驱动组件的两侧分别设置承重导向组件和承重导向清扫组件,实现了对巡检轨道机器人的主体部分进行承重、导向及清扫的技术效果。承重导向组件的承重轮和导向轮安装在可回转转动的承重轮架上、承重导向清扫组件的承重轮和导向轮安装在可回转转动的承重轮架上,由于承重轮落在工字轨道的底部侧板上,导向轮压持在工字轨道的中间板上,因此当工字轨道的弯度发生变化时,承重导向组件和承重导向清扫组件各自能够自适应性地转动一定的角度,因而本行走装置能够自适应工字轨道弯度的变化,避免发生卡阻以及阻力增大问题,降低承重轮的磨损。灵活转动的承重导向组件和承重导向清扫组件允许工字轨道具有转弯半径极小的弯度变化,因而令工字轨道的路径设计更具备灵活性而无需过度考虑转弯半径的特殊要求。由于承重导向组件和承重导向清扫组件的承重轮落在工字轨道的底部侧板上并沿着底部侧板滚动移动,因而本行走装置还能自适应工字轨道的坡度变化,进一步提升了工字轨道路径设计的灵活性。
13、驱动组件的驱动轴座及驱动轮能够横向移动并且采用拉簧提供拉力,因而在巡检轨道机器人沿着工字轨道移位的过程中,驱动轮能够根据实际轨道状况自适应调整位置且始终与工字轨道保持可靠接触,令驱动能力不受工字轨道变形、凹陷和凸起等因素的影响。通过设置调整机构及传动机构,令拉簧的拉力能够进行调节,进而调节驱动轮与工字轨道之间的压力。通过设置第一传动盒和第二传动盒,令两个清扫毛刷与本侧承重轮的转动效果同步,故清扫毛刷并无主动动力输入。通过设置第一摆动限位器和第二摆动限位器,在巡检轨道机器人沿工字轨道行驶移动的过程中,通过令摆动限位器与工字轨道的顶部侧板相配合,令传动盒与清扫毛刷不碰撞工字轨道。
技术特征:
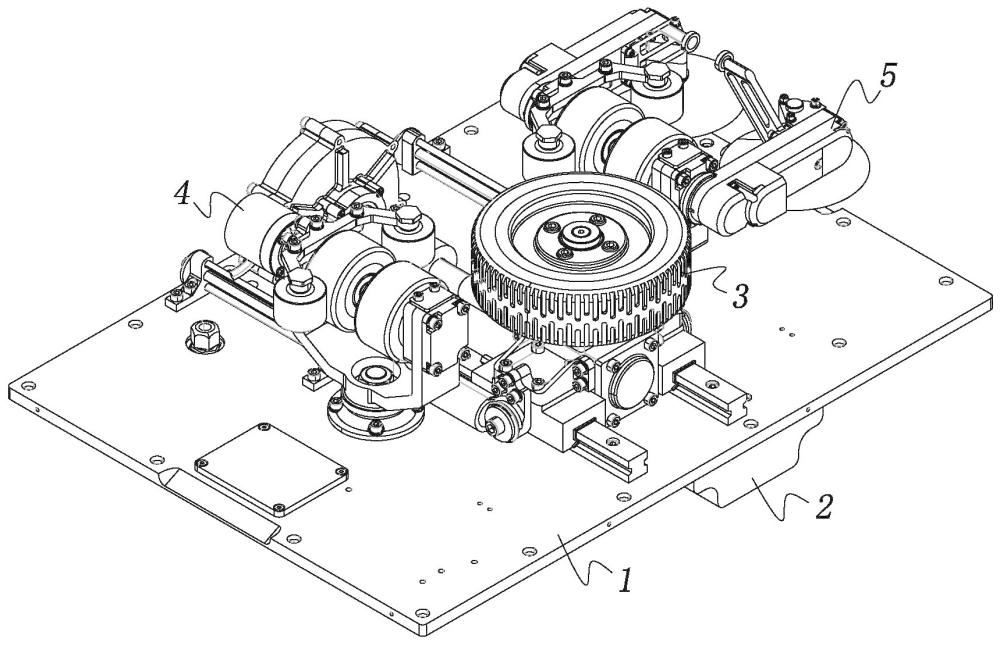
1.一种巡检轨道机器人自适应行走装置,其特征是:包括基板(1),在基板(1)的中部安装有驱动组件(3)和向驱动组件(3)输出动力的驱动机(2),在驱动组件(3)的一侧设有承重导向组件(4)、另一侧设有承重导向清扫组件(5);
2.如权利要求1所述的巡检轨道机器人自适应行走装置,其特征是:驱动组件(3)包括安装在基板(1)中部的两个导轨(3-4),在两个导轨(3-4)上安装有轨道块(3-2),驱动轴座(3-1)安装固定在两个轨道块(3-2)之间。
3.如权利要求2所述的巡检轨道机器人自适应行走装置,其特征是:驱动组件(3)的调节机构包括相对设置的两组光杠(3-6)以及安装在光杠(3-6)上的滑块(3-5),拉簧(3-3)的一端与驱动轴座(3-1)的侧部固定连接、另一端与本侧的滑块(3-5)固定连接;在光杠(3-6)上还安装有调节螺栓(3-11),在滑块(3-5)的中部设有螺纹孔且调节螺栓(3-11)位于螺纹孔内。
4.如权利要求3所述的巡检轨道机器人自适应行走装置,其特征是:驱动组件(3)的传动机构包括安装在基板(1)上的传动箱(3-10),驱动机(2)的输出轴与传动箱(3-10)的输入轴对接连接,传动箱(3-10)的输出轴与驱动轴座(3-1)的驱动轴(3-8)采用伸缩型联轴器(3-9)对接连接。
5.如权利要求1所述的巡检轨道机器人自适应行走装置,其特征是:承重导向组件(4)还包括与基板(1)固定连接的第一承重轴座(4-1)且在第一承重轴座(4-1)内安装有第一承重转轴(4-2),第一承重轮架(4-3)的中部与第一承重转轴(4-2)固定连接。
6.如权利要求5所述的巡检轨道机器人自适应行走装置,其特征是:在第一承重轮架(4-3)的一侧外部还安装有编码器(4-8),编码器(4-8)的输入轴与本侧的承重轮轮轴对接连接。
7.如权利要求1所述的巡检轨道机器人自适应行走装置,其特征是:承重导向清扫组件(5)还包括与基板(1)固定连接的第二承重轴座(5-1)且在第二承重轴座(5-1)内安装有第二承重转轴(5-16),第二承重轮架(5-10)的中部与第二承重转轴(5-16)固定连接。
8.如权利要求7所述的巡检轨道机器人自适应行走装置,其特征是:第一传动盒(5-2)与第二传动盒(5-7)的结构相同,均包括传动盒盒体及传动盒盒盖,在传动盒盒体内安装有传动齿轮、同轴的主动齿轮和主动带轮以及从动带轮,传动齿轮与本侧承重轮的轮轴外端连接,传动齿轮与主动齿轮啮合传动,主动带轮与从动带轮采用皮带传动连接。
9.如权利要求8所述的巡检轨道机器人自适应行走装置,其特征是:在第一传动盒(5-2)的端部内侧安装有第一清扫轴座(5-12),在第二传动盒(5-7)的端部内侧安装有第二清扫轴座(5-8),第一传动盒(5-2)的从动带轮轮轴与第一清扫轴座(5-12)的输出轴采用锥齿轮组传动,第二传动盒(5-7)的从动带轮轮轴与第二清扫轴座(5-8)的输出轴采用锥齿轮组传动。
10.如权利要求9所述的巡检轨道机器人自适应行走装置,其特征是:在第一传动盒(5-2)的根部与第二承重轮架(5-10)之间、第二传动盒(5-7)的根部与第二承重轮架(5-10)之间均安装有扭簧;第一摆动限位器(5-15)和第二摆动限位器(5-14)两者的结构相同,均包括限位支架以及安装在限位支架顶端的限位轮,限位支架的底端与本侧传动盒的传动盒盒体固定连接。
技术总结
本发明涉及一种巡检轨道机器人自适应行走装置。包括基板,在其中部安装有驱动组件和驱动机,在驱动组件的一侧设有承重导向组件、另一侧设有承重导向清扫组件;驱动组件包括驱动轴座,在其输出轴上安装有驱动轮,在驱动轴座上连接有拉簧,还包括调节机构以及传动机构;承重导向组件包括第一承重轮架,在第一承重轮架的顶部安装有承重轮、第一导向轮及导向轮;承重导向清扫组件包括第二承重轮架,在第二承重轮架的顶部安装有承重轮、第二导向轮支架及导向轮;在第二承重轮架的顶部外侧分别安装有传动盒,在传动盒的输出轴下端安装有清扫毛刷。本发明提升了巡检轨道机器人对轨道弯度及坡度变化的适应能力,提升了移动的顺畅性和稳定性。
技术研发人员:张宏帆,齐明锐,赵伟,马鸿飞
受保护的技术使用者:天津博宜特科技有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!