一种机械手的制作方法
本发明属于机械手设备,具体的说是一种机械手。
背景技术:
1、机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,随着科技的进步与发展、应用领域的不同,对机械手的性能需求多种多样,使得机械手在不同的领域,如工业货物搬运、产品周转加工、农业果蔬采摘等,不同的需求下具备不同的改进方向。
2、在某些作业范围较大、作业距离较长的工作环境中,由于机械手工作范围的影响,需要使得机械手具备可长距离移动的性能,通过机械手的整体移动,来扩大机械手的作业范围,相关技术中为了增强机械手的可移动性能,通常会在机械手安装底座上进行改进,通过安装底座的移动、运动,推动机械手整体运动,进而实现机械手的长距离作业,如申请号为2019102764309的中国专利,公布了一种移动抓取机器人和自动取货方法,就是通过将机械手安装在可移动基座上,通过可移动基座的运动,实现机械手的整体运动,进而扩大机械手的作业范围。
3、然而在实际应用中,机械手长距离运动时,尤其是在长距离连续作业时,对移动路面的平整度要求较高,因此当路面平整度较低时,机械手通常会因为震动、晃动、重心不稳定等因素的影响下,无法保证作业的连续性,致使作业中断、作业效果不稳定等现象产生鉴于此,本发明提出了一种机械手,用于解决上述技术问题。
技术实现思路
1、为了弥补现有技术的不足,解决上述技术问题,本发明提出了一种机械手。
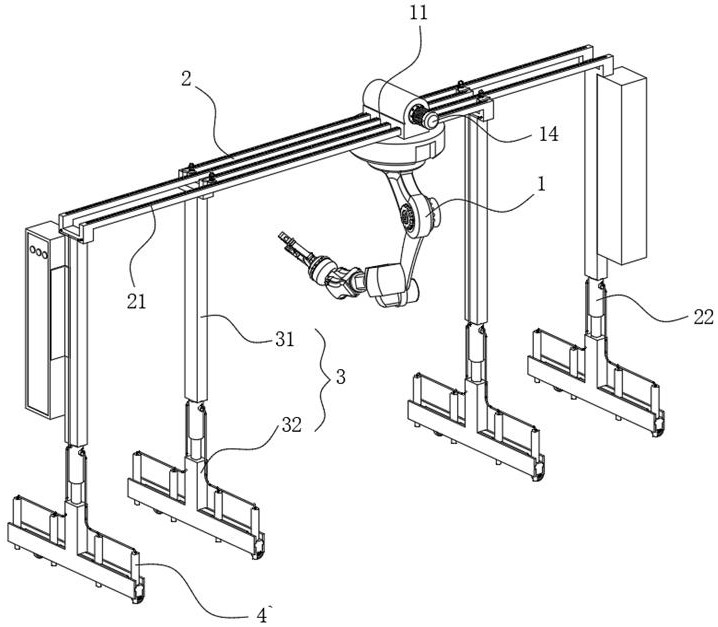
2、本发明解决其技术问题所采用的技术方案是:本发明所述的一种机械手,包括机械手本体和导向轨道,所述机械手本体安装在导向轨道上;
3、所述机械手本体上开设有滑动槽,所述机械手本体通过滑动槽与导向轨道滑动连接;
4、还包括交替移动组件,所述导向轨道安装在交替移动组件上,所述交替移动组件用于控制导向轨道交替运动;
5、所述交替移动组件包括支撑腿,所述导向轨道包括第一导向轨和第二导向轨,所述第一导向轨与第二导向轨平行设计,且第一导向轨和第二导向轨两端均固定安装有支撑腿;
6、伸缩缸,所述支撑腿由连接杆和支撑杆组成,所述连接杆与支撑杆之间固定安装伸缩缸,所述支撑杆为t形设计;
7、控制系统,所述控制系统与伸缩缸电连接,用于调整伸缩缸伸缩。
8、优选的,所述第一导向轨和第二导向轨包括多个滑轨和组装板,多个所述滑轨平行排列,所述组装板用于将多个滑轨进行固定连接,对应第一导向轨的滑轨和对应第二导向轨的滑轨间隔排列。
9、优选的,所述机械手本体上开设有驱动腔,所述驱动腔与滑动槽导通连接,所述驱动腔内转动安装有驱动轮,所述驱动轮外接第一驱动电机,所述驱动轮延伸至滑动槽内,所述驱动轮与滑轨接触。
10、优选的,所述滑轨上开设有升降槽,所述升降槽内固定安装有驱动杆,所述驱动杆采用可控伸缩杆制成,所述驱动杆上共同固定安装有齿板,初始状态下所述齿板与驱动轮啮合,所述驱动杆与控制系统电连接。
11、优选的,所述支撑杆远离连接杆一端均安装有行走轮,所述支撑杆上安装有抵接杆,所述抵接杆采用可控伸缩杆制成,所述抵接杆与控制系统电连接。
12、优选的,所述支撑杆上抵接杆均复数设计,且抵接杆在支撑杆上均匀排列。
13、优选的,所述支撑杆底部开设有伸缩槽,所述抵接杆均滑动安装在伸缩槽内,所述伸缩槽内安装有推杆,所述推杆用于将多个抵接杆依次串联,所述推杆采用可控伸缩杆制成,所述推杆与控制系统电连接。
14、优选的,所述伸缩槽为十字形设计,所述抵接杆上均固定安装有限位板,所述限位板与伸缩槽相匹配,多个限位板长度大于推杆伸长长度。
15、优选的,所述第一导向轨和第二导向轨上均固定安装有第二驱动电机,所述第二驱动电机输出端固定安装有摩擦辊,第一导向轨上的摩擦辊与第二导向轨摩擦接触、第二导向轨上的摩擦辊与第一导向轨摩擦接触,所述第二驱动电机与控制系统电连接。
16、本发明的有益效果如下:
17、1.本发明所述的一种机械手,通过设置交替移动组件,在需要改变机械手作业范围时,通过第一导向轨和第二导向轨的交替运动,使得导向轨道同时存在静止部分和运动部分,进而对机械手本体进行稳定的支撑,进而降低导向轨道移动对机械手本体的影响,既能够对机械手本体进行稳定的支撑,又能够满足导向轨道的可控制的运动,进而在机械手本体的作业范围的持续变化过程中,维持机械手本体作业的不间断。
18、2.本发明所述的一种机械手,通过采用多个滑轨组成第一导向轨、第二导向轨,使得第一导向轨、第二导向轨对机械手本体的支撑效果较好,且组成第一导向轨、第二导向轨的滑轨间隔排列,使得进一步使得第一导向轨和第二导向轨给予机械手本体的支撑效果差别较小,因此在第一导向轨、第二导向轨交替对机械手本体进行支撑时,能够有效的降低交替切换过程对机械手本体的影响。
19、3.本发明所述的一种机械手,该机械手本体能够运用在林果采摘上,设备在果园或农场中运行,在使用时,设备沿着果园或农场中农作物的排列方向进行移动,机械手本体在预先编写的采摘程序的控制下实现自动采摘,第一驱动电机持续低速运转,工作人员操作控制系统,致使第一导向轨和第二导向轨交替定向运动,因此在果园凹凸不平的地面上,使得设备稳定的定向平移,并在平移的过程中,对运动路径两侧的农作物进行稳定高效的采摘。
技术特征:
1.一种机械手,包括机械手本体(1)和导向轨道,所述机械手本体(1)安装在导向轨道上;
2.根据权利要求1所述的一种机械手,其特征在于:所述第一导向轨(2)和第二导向轨(21)包括多个滑轨(23)和组装板(24),多个所述滑轨(23)平行排列,所述组装板(24)用于将多个滑轨(23)进行固定连接,对应第一导向轨(2)的滑轨(23)和对应第二导向轨(21)的滑轨(23)间隔排列。
3.根据权利要求2所述的一种机械手,其特征在于:所述机械手本体(1)上开设有驱动腔(12),所述驱动腔(12)与滑动槽(11)导通连接,所述驱动腔(12)内转动安装有驱动轮(13),所述驱动轮(13)外接第一驱动电机(14),所述驱动轮(13)延伸至滑动槽(11)内,所述驱动轮(13)与滑轨(23)接触。
4.根据权利要求3所述的一种机械手,其特征在于:所述滑轨(23)上开设有升降槽(25),所述升降槽(25)内固定安装有驱动杆(26),所述驱动杆(26)采用可控伸缩杆制成,所述驱动杆(26)上共同固定安装有齿板(27),初始状态下所述齿板(27)与驱动轮(13)啮合,所述驱动杆(26)与控制系统电连接。
5.根据权利要求4所述的一种机械手,其特征在于:所述支撑杆(32)远离连接杆(31)一端均安装有行走轮(4),所述支撑杆(32)上安装有抵接杆(41),所述抵接杆(41)采用可控伸缩杆制成,所述抵接杆(41)与控制系统电连接。
6.根据权利要求5所述的一种机械手,其特征在于:所述支撑杆(32)上抵接杆(41)均复数设计,且抵接杆(41)在支撑杆(32)上均匀排列。
7.根据权利要求6所述的一种机械手,其特征在于:所述支撑杆(32)底部开设有伸缩槽(42),所述抵接杆(41)均滑动安装在伸缩槽(42)内,所述伸缩槽(42)内安装有推杆(43),所述推杆(43)用于将多个抵接杆(41)依次串联,所述推杆(43)采用可控伸缩杆制成,所述推杆(43)与控制系统电连接。
8.根据权利要求7所述的一种机械手,其特征在于:所述伸缩槽(42)为十字形设计,所述抵接杆(41)上均固定安装有限位板(44),所述限位板(44)与伸缩槽(42)相匹配,多个限位板(44)长度大于推杆(43)伸长长度。
9.根据权利要求8所述的一种机械手,其特征在于:所述第一导向轨(2)和第二导向轨(21)上均固定安装有第二驱动电机(5),所述第二驱动电机(5)输出端固定安装有摩擦辊(51),第一导向轨(2)上的摩擦辊(51)与第二导向轨(21)摩擦接触、第二导向轨(21)上的摩擦辊(51)与第一导向轨(2)摩擦接触,所述第二驱动电机(5)与控制系统电连接。
技术总结
本发明属于机械手设备技术领域,具体的说是一种机械手,包括机械手本体和导向轨道,所述机械手本体安装在导向轨道上;还包括交替移动组件,所述导向轨道安装在交替移动组件上,所述交替移动组件用于控制导向轨道交替运动;本发明通过设置交替移动组件,在需要改变机械手作业范围时,通过第一导向轨和第二导向轨的交替运动,使得导向轨道同时存在静止部分和运动部分,进而对机械手本体进行稳定的支撑,进而降低导向轨道移动对机械手本体的影响,既能够对机械手本体进行稳定的支撑,又能够满足导向轨道的可控制的运动,进而在机械手本体的作业范围的持续变化过程中,维持机械手本体作业的不间断。
技术研发人员:张熙岳,胡培芳
受保护的技术使用者:南京熙岳智能科技有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!