一种基于虚实融合技术的力反馈机器人的制作方法
本发明涉及机器人遥控领域,具体涉及一种基于虚实融合技术的力反馈机器人。
背景技术:
1、遥操作技术是指:为了实现操作者在远程或远端操作机器人的工作模式,并为操作者提供机器人相应传感(图像、力、声音等),同时操作者的决策指令信息及时传达到机器人,使机器人按预期要求运行的一种远程控制技术。研究机器人的临场感技术旨在提供操作者更完整的遥操作沉浸感和真实感体验,为机器人完成更复杂和半自主化的作业奠定基础。机器人遥操作理论的研究有着极其重要的现实意义,它有助于代替人类到达危害生命健康环境(如核放射污染、化学反应堆)、高花费的环境(外太空)、尺度限制环境(大型作业场景、微纳环境、一对多控制)等。
2、中国专利公开了一种虚—实融合结合力反馈感知的机器人遥操作方法(授权公告号cn 117325147 a),该专利技术能够解决现有机器人遥操作产品往往采用视频监控反馈或者力反馈的方式完成作业。但是首先,因遥操作机器人的作业对象复杂多样,作业范围受限;其次,视频监控平面图像反馈,并不能对深度图像进行有效感知,且占用带宽大、传输延迟明显,导致操作者临场感缺失;在实际使用过程中,往往会存在图像模糊问题。
3、现有的机器人本体采用单一摄像头进行画面拍摄和传输,若摄像头拍摄模糊则导致使用者对环境感受度差,并且信号发射器若出现故障则可能导致传输速度慢,当机器人本体工作时对其更换不便。
技术实现思路
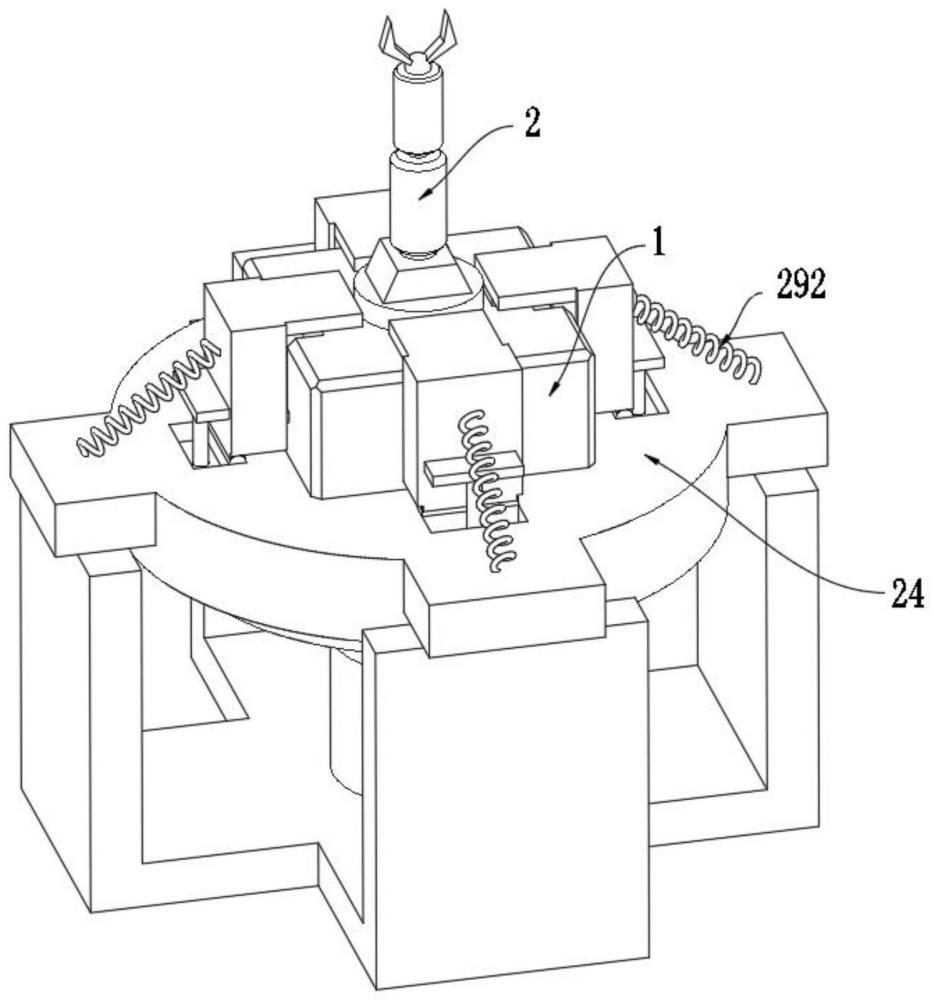
1、为解决上述技术问题,本发明提供一种基于虚实融合技术的力反馈机器人,包括有机器人本体和机械臂,所述机器人本体上端面开设有放置槽,放置槽内底部安装有调节电机,调节电机输出端安装有底台,底台上端面安装有机械臂,机器人本体上方布置有摄像头,摄像头内侧端布置有信号发射器。
2、优选地:所述机器人本体外侧壁沿其周向方向开设有多个放置槽,放置槽内安装有摄像头。
3、优选地:所述放置槽内底部安装有电动滑块,电动滑块上端面通过销轴转动安装有伸缩杆,伸缩杆另一端安装有环形套,环形套内侧壁安装有摄像头本体。
4、优选地:所述机器人本体上端面沿其周向方向开设有多个方形槽,方形槽内侧壁通过轴承转动安装有固定杆,固定杆外侧壁上下对称安装有信号发射器。
5、优选地:所述信号发射器外侧端左右对称安装有调节开关,调节开关为弹簧按钮结构。
6、优选地:所述方形槽底部安装有弹簧柱,弹簧柱上端面安装有压板,固定杆内侧端布置有固定电机。
7、优选地:所述机器人本体底部安装有底盘,底盘上端面通过销轴转动安装有多个盖腔,盖腔内布置有摄像头。
8、优选地:所述底盘底部安装有壳板,壳板内底部安装有调节液压缸,调节液压缸输出端安装有圆板,圆板上端面沿其周向方向安装有多个圆杆,圆杆穿过底盘且与其通过滑动配合的方式相连接,圆杆上端面安装有挡板。
9、优选地:所述底盘上端面安装有多个调节弹簧,调节弹簧另一端与盖腔外侧端相连接。
10、优选地:所述信号发射器与摄像头之间通过电性连接。
11、本发明的技术效果和优点:
12、1、本发明中采用多个摄像头和信号发射器结构,从而能够对整体环境进行实时拍摄并且进行传输,有效避免单一摄像头画质模糊、传输慢的问题,确保更加清晰了解环境,从而准确做出指令。
13、2、本发明中单个摄像头采用两个信号发射器进行控制结构,便于单个信号发射器出现故障时进行快速更换,避免影响画面正常传输,并且采用弹簧柱结构,使得两个信号发射器交替工作,避免出现信号紊乱。
技术特征:
1.一种基于虚实融合技术的力反馈机器人,包括有机器人本体(1)和机械臂(2),其特征在于,所述机器人本体(1)上端面开设有放置槽,放置槽内底部安装有调节电机(11),调节电机(11)输出端安装有底台(14),底台(14)上端面安装有机械臂(2),机器人本体(1)上方布置有摄像头(12),摄像头(12)内侧端布置有信号发射器(13)。
2.根据权利要求1所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述机器人本体(1)外侧壁沿其周向方向开设有多个放置槽,放置槽内安装有摄像头(12)。
3.根据权利要求2所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述放置槽内底部安装有电动滑块(15),电动滑块(15)上端面通过销轴转动安装有伸缩杆(16),伸缩杆(16)另一端安装有环形套(17),环形套(17)内侧壁安装有摄像头(12)本体。
4.根据权利要求1所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述机器人本体(1)上端面沿其周向方向开设有多个方形槽,方形槽内侧壁通过轴承转动安装有固定杆(18),固定杆(18)外侧壁上下对称安装有信号发射器(13)。
5.根据权利要求1所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述信号发射器(13)外侧端左右对称安装有调节开关(19),调节开关(19)为弹簧按钮结构。
6.根据权利要求4所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述方形槽底部安装有弹簧柱(21),弹簧柱(21)上端面安装有压板(22),固定杆(18)内侧端布置有固定电机(23)。
7.根据权利要求1所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述机器人本体(1)底部安装有底盘(24),底盘(24)上端面通过销轴转动安装有多个盖腔(25),盖腔(25)内布置有摄像头(12)。
8.根据权利要求1所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述底盘(24)底部安装有壳板(26),壳板(26)内底部安装有调节液压缸(27),调节液压缸(27)输出端安装有圆板(28),圆板(28)上端面沿其周向方向安装有多个圆杆(29),圆杆(29)穿过底盘(24)且与其通过滑动配合的方式相连接,圆杆(29)上端面安装有挡板(291)。
9.根据权利要求7所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述底盘(24)上端面安装有多个调节弹簧(292),调节弹簧(292)另一端与盖腔(25)外侧端相连接。
10.根据权利要求1所述的一种基于虚实融合技术的力反馈机器人,其特征在于,所述信号发射器(13)与摄像头(12)之间通过电性连接。
技术总结
本发明涉及机器人遥控领域,具体涉及一种基于虚实融合技术的力反馈机器人,包括有机器人本体和机械臂,所述机器人本体上端面开设有放置槽,放置槽内底部安装有调节电机,调节电机输出端安装有底台,底台上端面安装有机械臂,机器人本体上方布置有摄像头,摄像头内侧端布置有信号发射器,本发明中采用多个摄像头和信号发射器结构,从而能够对整体环境进行实时拍摄并且进行传输,有效避免单一摄像头画质模糊、传输慢的问题,确保更加清晰了解环境,从而准确做出指令。
技术研发人员:牟宏磊,蒙洋,刘晶畾,杨蠡凯,刘芳琳
受保护的技术使用者:龙行智远(重庆)智能科技有限公司
技术研发日:
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!