一种智能感应机械手及方法
本发明属于机械手,更具体地,涉及一种智能感应机械手及方法。
背景技术:
1、机械手在与人进行物品递送等任务时,需要能够对机械手与人的接触状态进行实时、准确的测量。传统的测量方法有基于力觉传感器和基于视觉传感器两类方法。
2、基于力觉传感器的方法通常在机械手末端安装力传感器。可以在机械手与人手进行物品递送时,对交互力进行测量。然而,采用此类方法具有两个局限性:第一,力传感器只能在机械手与人手发生物理接触的时候进行交互力的测量,无法评估人手的接近状态。第二,力传感器存在漂移问题,长时间、多次使用情况下存在漂移问题,且由于传感器往往安装在机械臂与机械手之间,数据标定比较困难。
3、基于视觉传感器的方法采用rgb或者rgbd相机捕捉机械手工作图像,相较于力传感器,可在机械手与人手未接触的时候对两者之间的相对姿态进行评估。然而,视觉传感器对遮挡比较敏感(人手与机械手距离越近,遮挡造成的干扰越大),且无法对机械手与人手的交互力进行测量。
4、综上,受限于当前技术水平,机械手与人手在物品传递过程中仍在存在较大的感知空白。一方面,对机械手的使用体验会造成不良影响,另一方面,在极端情况下可能在交互中存在一定的危险。如何解决机械手与人手在物品传递过程中机械手对人手的感知能力,是提升人机交互可靠性与稳定性的关键问题。
技术实现思路
1、发明目的:本发明的目的是为了解决现有技术中的不足,提供一种智能感应机械手及方法,该机械手可以在与人手进行物品递送的过程中,特别是在最后的临近接触与发生接触阶段,对人手与机械手之间的距离信息与力交互状态进行实时、稳定的测量,有效提升机械手与人手交互的可靠性与稳定性。
2、技术方案:本发明所述的一种智能感应机械手,包括安装基座、电机、主动齿轮、弹性夹手、从动杆、感应极板、弹性垫、压力传感器、从动齿轮、前板和后板;
3、所述前板和后板固定安装在所述安装基座上,所述主动齿轮、从动杆和从动齿轮铰接安装在所述前板与后板之间;
4、所述电机安装在所述前板上并与所述主动齿轮同轴连接,所述主动齿轮与所述从动齿轮啮合连接;所述主动齿轮、从动齿轮均连接有所述弹性夹手,所述弹性夹手分别连接有所述从动杆;
5、所述弹性夹手外侧安装有感应极板,所述弹性夹手内侧安装有弹性垫和压力传感器。
6、在一些实施方式中,所述前板和后板相互平行安装,且中间设有间隙。
7、在一些实施方式中,所述电机安装在所述前板的一侧,电机的输出端在前板的另一侧与主动齿轮固定安装。
8、在一些实施方式中,所述主动齿轮和从动齿轮的一端均为渐开线齿轮,另一端均为长杆且分别与弹性夹手铰接。
9、在一些实施方式中,所述弹性夹手和从动杆分别有两个。
10、在一些实施方式中,所述弹性夹手、主动齿轮、从动杆和前板与后板之间的铰接点组成平行四边形。
11、在一些实施方式中,所述弹性夹手采用弹性材料制成,一端有两个铰接孔,另一端呈类矩形结构,内部为中空结构,被夹取物体接触的区域为内圆弧凹槽结构。
12、在一些实施方式中,所述弹性垫以阵列的形式粘贴于弹性夹手的圆弧凹槽内侧,在弹性垫上以阵列的形式安装压力传感器。
13、在一些实施方式中,还包括计算模块,所述计算模块分别与所述电机、感应极板、压力传感器连接。
14、另一方面,本发明还公开了所述的智能感应机械手的测量方法,包括:
15、(1)实现交互力的测量:通过将压力与摩擦系数相乘,可以得到被夹取物体的重量,在机械手水平状态下,有:
16、
17、其中,为摩擦系数, n为夹手中压力传感器的数量,为第 i个压力传感器测量得到的压力, f为被夹取物体的重量;
18、通过对比分析各个压力传感器的数据,对机械手受到的扭矩进行计算,并由此实现对机械手与人手的力交互状态进行计算;
19、(2)获取人手与机械手的相对位置关系:感应极板之间互不相连,并分别通过独立导线与计算模块连接,计算模块内含寄生电容测量电路,对感应极板处的寄生电容进行测量,寄生电容的值与感应极板-人手之间的距离正相关,通过各个极板上寄生电容的测量值推断人手与机械手的相对位置关系。
20、有益效果:本发明的有益效果如下:
21、(1)本发明的机械手,弹性夹手、主动齿轮、从动齿轮、从动杆和前板与后板之间的铰接点组成平行四边形,在电机转动过程中,可以保证左侧的弹性夹手以固定的姿态平移;
22、(2)本发明的机械手,弹性夹手均采用弹性材料设计,一端有两个铰接孔,另一端呈类矩形结构,内部为中空设计;同时与被夹取物体接触的区域为内圆弧凹槽,弹性材料与中空设计,保证了弹性夹手在物体夹取过程中具有较高的柔性,在夹取物体的过程中,通过弹性形变,提高弹性夹手与被抓取物体的贴合性,实现稳定抓取;
23、(3)本发明的机械手,弹性垫以阵列的形式粘贴于弹性夹手的圆弧内侧,同时在弹性垫上以阵列的形式安装压力传感器,弹性垫保证了压力传感器与被抓取物体的贴合性,实现交互力的高精度测量;
24、(4)感应极板之间互不相连,并分别通过独立导线与计算模块连接,计算模块内含寄生电容测量电路,对感应极板处的寄生电容进行测量,寄生电容的值与感应极板-人手之间的距离正相关,通过各个极板上寄生电容的测量值推断人手与机械手的相对位置关系。
技术特征:
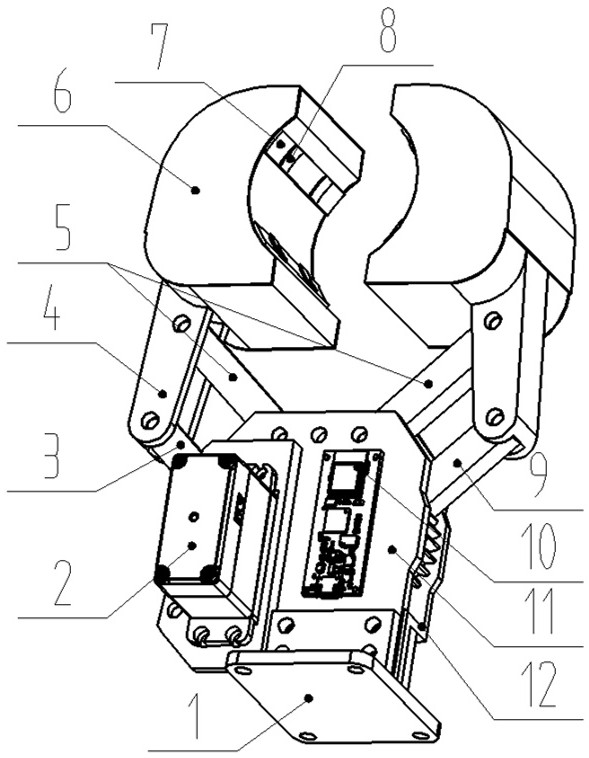
1.一种智能感应机械手,其特征在于:包括安装基座(1)、电机(2)、主动齿轮(3)、弹性夹手(4)、从动杆(5)、感应极板(6)、弹性垫(7)、压力传感器(8)、从动齿轮(9)、前板(11)和后板(12);
2.根据权利要求1所述的一种智能感应机械手,其特征在于:所述前板(11)和后板(12)相互平行安装,且中间设有间隙。
3.根据权利要求1所述的一种智能感应机械手,其特征在于:所述电机(2)安装在所述前板(11)的一侧,电机(2)的输出端在前板(11)的另一侧与主动齿轮(3)固定安装。
4.根据权利要求1所述的一种智能感应机械手,其特征在于:所述主动齿轮(3)和从动齿轮(9)的一端均为渐开线齿轮,另一端均为长杆且分别与弹性夹手(4)铰接。
5.根据权利要求1所述的一种智能感应机械手,其特征在于:所述弹性夹手(4)和从动杆(5)分别有两个。
6.根据权利要求5所述的一种智能感应机械手,其特征在于:所述弹性夹手(4)、主动齿轮(3)、从动杆(5)和前板(11)与后板(12)之间的铰接点组成平行四边形。
7.根据权利要求1所述的一种智能感应机械手,其特征在于:所述弹性夹手(4)采用弹性材料制成,一端有两个铰接孔,另一端呈类矩形结构,内部为中空结构,被夹取物体接触的区域为内圆弧凹槽结构。
8.根据权利要求7所述的一种智能感应机械手,其特征在于:所述弹性垫(7)以阵列的形式粘贴于弹性夹手(4)的圆弧凹槽内侧,在弹性垫(7)上以阵列的形式安装压力传感器(8)。
9.根据权利要求1所述的一种智能感应机械手,其特征在于:还包括计算模块(10),所述计算模块(10)分别与所述电机(2)、感应极板(6)、压力传感器(8)连接。
10.根据权利要求1-9任意一项所述的智能感应机械手的测量方法,其特征在于:包括:
技术总结
本发明公开了一种智能感应机械手及方法,该机械手包括安装基座、电机、主动齿轮、弹性夹手、从动杆、感应极板、弹性垫、压力传感器、从动齿轮、计算模块、前板和后板。所述弹性夹手采用弹性材料设计。在夹取物体的过程中,通过弹性形变,提高弹性夹手与被抓取物体的贴合性,实现稳定抓取。所述弹性垫保证了压力传感器与被抓取物体的贴合性,实现交互力的高精度测量。所述感应极板采用铜箔或银箔等低电阻材料,共6块,其中每个弹性夹手上覆盖3块,分别位于弹性夹手的侧边、上边和下边。感应极板之间互不相连,可通过各个极板上寄生电容的测量值计算人手与机械手之间的相对位置关系。
技术研发人员:王海鹏
受保护的技术使用者:江苏工程职业技术学院
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!