一种适用于打磨机器人用的高精度高响应控制器的制作方法
本发明涉及打磨设备,具体的说是一种适用于打磨机器人用的高精度高响应控制器。
背景技术:
1、传统人工打磨方式的人力资源成本越来越高,环保要求也越来越高,各方面原因迫使生产企业进行产业升级,自动化行业的技术发展,自动打磨工艺的逐渐成熟满足了生产企业的自动化改造需求,但现有自动化打磨中的专机打磨 灵活度低、换型复杂且换型门槛较高,需供应商现场服务,生产成本高,然而在对工件进行加工的过程中,通需要对其进行打磨处理,为了提高打磨机器人打磨的精准度,因此需要一种适用于打磨机器人用的高精度高响应控制器,现有的用于对工件进行打磨的自动打磨机器人,虽然能够满足对工件进行打磨的基本需求,但由于打磨机器人中高精度高响应控制器对打磨机器人起到控制作用,当高精度高响应控制器长时间的工作,其内部的电子元件老化需要对其进行更换安装时,然而现有的高精度高响应控制器通过用螺栓将其固定安装在打磨机器人外侧,当打磨机器人突然间坏了,需要指定的工具对其进行拆卸与安装,但是在寻找指定的工具时需要花费一定的时间,在此期间打磨机器人无法正常工作,从而降低了打磨机器人的工作效率,并且现有的高精度高响应控制器安装在打磨机器内部,外界的灯光对高精度高响应控制器内部空间的照明度有一定的影响,从而提高了维修人员对对高精度高响应控制器的维修难度。
技术实现思路
1、针对现有技术的不足,本发明提供了一种适用于打磨机器人用的高精度高响应控制器,解决了当高精度高响应控制器长时间的工作,其内部的电子元件老化需要对其进行更换安装时,然而现有的高精度高响应控制器通过用螺栓将其固定安装在打磨机器人外侧,当打磨机器人突然间坏了,需要指定的工具对其进行拆卸与安装,但是在寻找指定的工具时需要花费一定的时间,在此期间打磨机器人无法正常工作,从而降低了打磨机器人的工作效率,并且现有的高精度高响应控制器安装在打磨机器内部,外界的灯光对高精度高响应控制器内部空间的照明度有一定的影响,从而提高了维修人员对对高精度高响应控制器的维修难度的技术问题。
2、为了实现上述目的,本发明采用了如下技术方案:
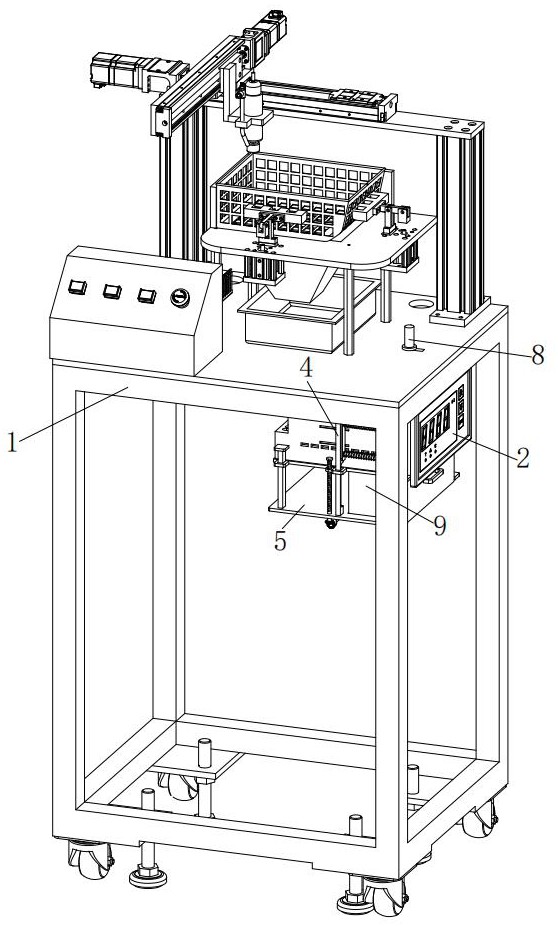
3、本发明解决其技术问题所采用的技术方案是:一种适用于打磨机器人用的高精度高响应控制器,包括打磨机器人设备,所述打磨机器人设备的内部插设有控制器组件,所述打磨机器人设备的底端固定安装有连接组件,且连接组件的底端固定安装有挤压组件,所述挤压组件的底端固定安装有调节组件,且调节组件的顶端固定安装有导向组件,所述连接组件的底端固定安装有限位组件,所述打磨机器人设备的内部插设有拉杆,所述调节组件的底端固定安装有存储组件;
4、所述连接组件包括固定柱,且固定柱固定安装在打磨机器人设备的底端,且固定柱的底端固定安装有顶板,所述顶板的底端固定安装有导向板,且导向板的内部插设有滑动板,且滑动板固定安装在控制器组件的顶端,所述滑动板的外形呈“t”形结构;
5、所述挤压组件包括连接杆,且连接杆固定安装在顶板的底端,所述控制器组件的外侧固定安装有连接块,所述连接块的外侧固定安装有第一伸缩杆,且第一伸缩杆的外侧套设有第一弹簧,所述第一伸缩杆的一端固定安装有活动杆,且活动杆的外侧固定安装有导向块,所述连接杆的内部开设有导向槽,所述导向块的外形呈“t”形结构,所述控制器组件的内部开设有与导向块相适配的滑槽,所述导向块插设在控制器组件的内部,所述活动杆插设在导向槽的内部。
6、优选的,所述调节组件包括底板,且底板固定安装在连接杆的底端,所述底板的底端固定安装有电机,且电机的转动输出轴一端固定安装有转动轴,所述底板的底端固定安装有限位框,所述转动轴的一端固定安装有第一锥形齿轮,所述底板的内部插设有螺纹柱,且螺纹柱的底端固定安装有第二锥形齿轮,所述连接杆的外侧套设有第一滑动套,且第一滑动套的外侧固定安装有螺纹套,所述第一滑动套的外侧固定安装有挤压板。
7、优选的,所述转动轴插设在限位框的内部,所述第一锥形齿轮与第二锥形齿轮通过齿牙相啮合,所述转动轴共设置有两组且以底板的中心对称面呈对称状设置。
8、优选的,所述螺纹柱插设在螺纹套的内部,所述螺纹柱与螺纹套通过螺纹相啮合。
9、优选的,所述导向组件包括导向杆,且导向杆固定安装在底板的顶端,所述挤压板的外侧固定安装有第二滑动套。
10、优选的,所述导向杆插设在第二滑动套的内部,所述导向杆与第二滑动套共设置有两组且以底板的中心对称面呈对称状设置。
11、优选的,所述限位组件包括第一连接板,且第一连接板固定安装在顶板的底端,所述第一连接板的内部插设有转轴,且转轴的外侧固定安装有圆形齿轮,所述控制器组件的顶端固定安装有齿条,所述转轴的外侧固定安装有第一斜齿轮,所述顶板的底端固定安装有第二连接板,且第二连接板的内部插设有滑动柱,所述滑动柱的外侧固定安装有第二斜齿轮,所述第二连接板的内部固定安装有第二伸缩杆,且第二伸缩杆的外侧套设有第二弹簧。
12、优选的,所述圆形齿轮与齿条通过齿牙相啮合,所述第一斜齿轮与第二斜齿轮通过齿牙相啮合。
13、优选的,所述滑动柱的外形呈矩形结构,所述第二连接板的内部开设有与滑动柱相适配的滑槽,所述拉杆套设在滑动柱的外侧,所述打磨机器人设备的内部开设有与拉杆相适配的滑槽。
14、优选的,所述存储组件包括存储架,且存储架固定安装在挤压板的底端,所述存储架的内部插设有抽屉。
15、本发明的有益效果是:
16、(1)本发明所述的一种适用于打磨机器人用的高精度高响应控制器,挤压组件中,由于拉杆带动限位组件移动,使限位组件解除对控制器组件的限位,此刻通过第一弹簧的弹力,使活动杆通过在导向块在控制器组件的内部移动,且连接块带动控制器组件向外移动,与此同时控制器组件通过滑动板在导向板的内部移动,随后通过调节组件的下降,此刻控制器组件通过重力势能向下移动,便于将控制器组件通过活动杆从导向槽内部取出,以便于对控制器组件进行拆卸,反之控制器组件通过活动杆插设在导向槽的内部,且通过调节组件将控制器组件向上移动,使活动杆在导向槽内部滑动到顶端,此刻控制器组件通过滑动板插设在导向板的内部,与此同时推动控制器组件,使其向打磨机器人设备内部移动,通过限位组件对控制器组件的限位,以便于对进行安装的目的,从而提高了对控制器组件拆卸安装的效率,并且提高了打磨机器人的工作效率。
17、(2)本发明所述的一种适用于打磨机器人用的高精度高响应控制器,限位组件中,通过设置第二斜齿轮,且拉杆带动滑动柱移动时,使第二斜齿轮的齿牙与第一斜齿轮的齿牙产生错位,使第一斜齿轮缺乏限位,此刻通过第一弹簧的弹力使控制器组件向外移动,且齿条跟随控制器组件而移动,此刻齿条与圆形齿轮通过齿牙相啮合,使圆形齿轮转动,且第一斜齿轮通过转轴跟随圆形齿轮而转动,此刻以便于外接的灯光照射到控制器组件的内部,以便于维修人员对控制器组件内部的电气元件进行检修的目的。
技术特征:
1.一种适用于打磨机器人用的高精度高响应控制器,其特征在于:包括打磨机器人设备(1),所述打磨机器人设备(1)的内部插设有控制器组件(2),所述打磨机器人设备(1)的底端固定安装有连接组件(3),且连接组件(3)的底端固定安装有挤压组件(4),所述挤压组件(4)的底端固定安装有调节组件(5),且调节组件(5)的顶端固定安装有导向组件(6),所述连接组件(3)的底端固定安装有限位组件(7),所述打磨机器人设备(1)的内部插设有拉杆(8),所述调节组件(5)的底端固定安装有存储组件(9);
2.根据权利要求1所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述调节组件(5)包括底板(510),且底板(510)固定安装在连接杆(410)的底端,所述底板(510)的底端固定安装有电机(520),且电机(520)的转动输出轴一端固定安装有转动轴(530),所述底板(510)的底端固定安装有限位框(540),所述转动轴(530)的一端固定安装有第一锥形齿轮(550),所述底板(510)的内部插设有螺纹柱(560),且螺纹柱(560)的底端固定安装有第二锥形齿轮(570),所述连接杆(410)的外侧套设有第一滑动套(580),且第一滑动套(580)的外侧固定安装有螺纹套(590),所述第一滑动套(580)的外侧固定安装有挤压板(5100)。
3.根据权利要求2所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述转动轴(530)插设在限位框(540)的内部,所述第一锥形齿轮(550)与第二锥形齿轮(570)通过齿牙相啮合,所述转动轴(530)共设置有两组且以底板(510)的中心对称面呈对称状设置。
4.根据权利要求2所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述螺纹柱(560)插设在螺纹套(590)的内部,所述螺纹柱(560)与螺纹套(590)通过螺纹相啮合。
5.根据权利要求3所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述导向组件(6)包括导向杆(610),且导向杆(610)固定安装在底板(510)的顶端,所述挤压板(5100)的外侧固定安装有第二滑动套(620)。
6.根据权利要求5所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述导向杆(610)插设在第二滑动套(620)的内部,所述导向杆(610)与第二滑动套(620)共设置有两组且以底板(510)的中心对称面呈对称状设置。
7.根据权利要求1所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述限位组件(7)包括第一连接板(710),且第一连接板(710)固定安装在顶板(320)的底端,所述第一连接板(710)的内部插设有转轴(720),且转轴(720)的外侧固定安装有圆形齿轮(730),所述控制器组件(2)的顶端固定安装有齿条(740),所述转轴(720)的外侧固定安装有第一斜齿轮(750),所述顶板(320)的底端固定安装有第二连接板(760),且第二连接板(760)的内部插设有滑动柱(770),所述滑动柱(770)的外侧固定安装有第二斜齿轮(780),所述第二连接板(760)的内部固定安装有第二伸缩杆(790),且第二伸缩杆(790)的外侧套设有第二弹簧(7100)。
8.根据权利要求7所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述圆形齿轮(730)与齿条(740)通过齿牙相啮合,所述第一斜齿轮(750)与第二斜齿轮(780)通过齿牙相啮合。
9.根据权利要求7所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述滑动柱(770)的外形呈矩形结构,所述第二连接板(760)的内部开设有与滑动柱(770)相适配的滑槽,所述拉杆(8)套设在滑动柱(770)的外侧,所述打磨机器人设备(1)的内部开设有与拉杆(8)相适配的滑槽。
10.根据权利要求1所述的一种适用于打磨机器人用的高精度高响应控制器,其特征在于:所述存储组件(9)包括存储架(910),且存储架(910)固定安装在挤压板(5100)的底端,所述存储架(910)的内部插设有抽屉(920)。
技术总结
本发明涉及了打磨设备技术领域,具体的说是一种适用于打磨机器人用的高精度高响应控制器,包括打磨机器人设备,所述打磨机器人设备的内部插设有控制器组件;由于拉杆带动限位组件移动,使限位组件解除对控制器组件的限位,此刻通过第一弹簧的弹力,连接块带动控制器组件向外移动,随后通过调节组件的下降,此刻控制器组件通过重力势能向下移动,便于将控制器组件通过活动杆从导向槽内部取出,以便于对控制器组件进行拆卸,反之控制器组件通过活动杆插设在导向槽的内部,且通过调节组件将控制器组件向上移动,使活动杆在导向槽内部滑动到顶端,推动控制器组件,通过限位组件对控制器组件的限位,以便于对进行安装的目的。
技术研发人员:徐云云,汪存益,吴小勇,程刚
受保护的技术使用者:安徽新境界自动化技术有限公司
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!