一种榴莲修枝作业管理系统的制作方法
本发明涉及作业管理系统,尤其涉及一种榴莲修枝作业管理系统。
背景技术:
1、榴莲是一种热带水果,具有独特的风味和香气,深受全球消费者喜爱。榴莲果树的生长和修剪技术一直是农业领域的一个研究重点,主要是为了提高果树的产量和质量。修剪技术是指通过剪除部分枝条和叶片,调整榴莲果树的生长形态和分支结构,从而提高果树的产量和质量。首先,选择适当的树形是非常重要的。榴莲树可以栽培成圆形、塔形、矮生丛生等形状,具体选择取决于栽培的目的和场地条件。其次,及时修剪枝条是促进榴莲果树生长的关键。该技术可有效改善树冠通风和光照,有利于果实的营养供应和光合作用,最终提高果实的质量和产量。目前对于榴莲果树的修剪主要依赖种植人员的主观经验肉眼判断榴莲果树是否需要进行修枝作业,需要投入较多的人力成本,且容易出现遗漏。
技术实现思路
1、鉴于此,本发明的目的在于提供一种榴莲修枝作业管理系统,以解决现有技术所存在的上述技术问题。
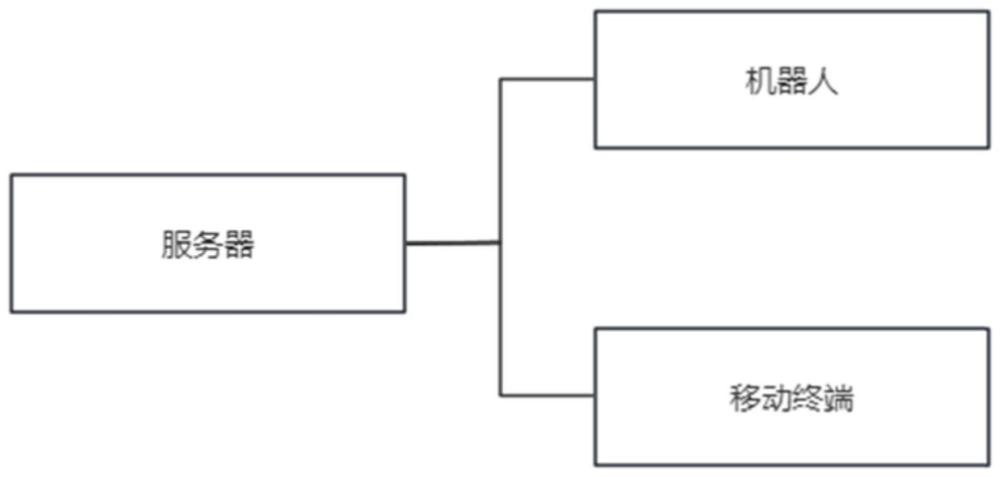
2、为实现上述发明目的,本发明提供一种榴莲修枝作业管理系统,所述系统包括:
3、机器人,用于根据预先设置的行进路线在榴莲种植区域前进,在前进过程过程中采集榴莲果树图像,将榴莲果树图像传输到服务器;
4、服务器,用于对榴莲果树图像作为输入参数,输入到经过预训练的神经网络模型中,对榴莲果树的树形和枝叶结构进行识别,根据识别结果判断榴莲果树是否需要进行修枝作业,在判断榴莲果树需要进行修枝作业时生成作业任务,将作业任务派发到移动终端;
5、移动终端,用于接收服务器派发的作业任务,查看作业任务,输入作业任务完成情况并上传到服务器。
6、进一步的,所述机器人包括带有移动机构的机器人本体,所述机器人本体上设有图像采集机构、第一定位模块、避障传感器、控制主板和通讯模块,所述图像采集机构用于采集榴莲果树图像发送到控制主板,所述第一定位模块用于对机器人的实时位置进行定位,所述避障传感器用于检测机器人行进道路上的障碍物并向控制主板发送信号,所述控制主板用于根据预设行进路线控制机器人行进以及根据避障传感器信号避开行进路线上的障碍物,将榴莲果树图像通过通讯模块上传到服务器。
7、进一步的,所述图像采集机构包括升降机构、多轴机械臂和摄像头,所述升降机构设置于机器人本体顶部,用于驱动多轴机械臂升降,所述多轴机械臂用于改变摄像头的位置和拍摄角度,所述摄像头设置于多轴机械臂的末端,所述升降机构、多轴机械臂分别通过控制电路与控制主板信号相连,所述摄像头与控制主板信号相连。
8、进一步的,所述图像采集机构还包括电子标签读写模块,所述电子标签读写模块设置于多轴机械臂的末端,电子标签读写模块与控制主板信号相连。
9、进一步的,所述系统还包括电子标签,所述电子标签设置在榴莲果树上,用于存储榴莲果树的识别信息。
10、进一步的,所述机器人被配置为执行以下方法:
11、s1、控制主板通过通讯模块接收服务器下发的行进路线,控制机器人本体按照所接收的行进路线前进;
12、s2、第一定位模块在机器人本体前进过程中进行实时定位,将定位信息发送至控制主板,控制主板根据定位信息判断机器人本体是否移动到行进路线上的预设位点;
13、s3、当机器人本体移动到预设位点位置时,控制主板控制机器人本体停止移动,随后通过控制升降机构、多轴机械臂调整摄像头的拍摄角度和位置,采集榴莲果树图像,并通过电子标签读写模块读取榴莲果树上的电子标签信息,将采集到的榴莲果树图像、电子标签信息以及采集位置信息发送到服务器,然后移动到下一预设位点;
14、s4、重复执行步骤s3,直至机器人移动到行进路线终点。
15、进一步的,所述服务器包括:
16、数据关联模块,用于获取机器人上传的榴莲果树图像、电子标签信息和采集位置信息,通过识别电子标签信息识别与其同时上传的榴莲果树图像所属的榴莲果树,将榴莲果树图像、采集位置信息与相应的榴莲果树建立关联关系;
17、第一数据处理模块,用于将榴莲果树图像作为输入参数,输入到经过预训练的神经网络模型中,对榴莲果树的树形和枝叶结构进行识别,输出识别结果;
18、第二数据处理模块,用于基于预设经验库结合第一数据处理模块的识别结果判断榴莲果树是否需要进行修枝作业,若判断榴莲果树需要进行修枝作业,则进一步结合识别结果和预设策略库分析榴莲果树需要采取的修枝策略;
19、任务生成模块,用于在第二数据处理模块判断榴莲果树需要进行修枝作业时,生成作业任务,根据需要进行修枝作业的榴莲果树对应的采集位置信息、电子标签信息和修枝策略生成作业任务内容。
20、任务派发模块,用于获取移动终端上报的作业任务统计数据,根据移动终端的作业任务统计数据派发作业任务到移动终端;
21、任务统计模块,用于获取移动终端上报的作业任务完成数据,统计、分析和管理作业任务完成情况。
22、进一步的,所述移动终端包括:
23、任务接收模块,用于接收服务器下发的作业任务,显示作业任务内容;
24、第二定位模块,用于在被触发时对移动终端当前位置进行定位;
25、任务填报模块,用于读取电子标签信息,根据电子标签信息触发作业任务填报页面和第二定位模块,在作业任务填报页面上传榴莲果树修枝后图像,设置作业任务完成状态,将包含电子标签信息、榴莲果树修枝后图像、移动终端实时定位信息、作业任务完成状态的作业任务完成数据上传到服务器;
26、任务统计模块,用于统计移动终端所接收到的作业任务的完成状态,生成作业任务统计数据,将作业任务统计数据上传到服务器。
27、与现有技术相比,本发明的有益效果是:
28、本发明提供的一种榴莲修枝作业管理系统,通过机器人采集榴莲果树图像,由服务器通过预训练过的神经网络模型对榴莲果树图像中榴莲果树的树形和枝叶结构进行识别,判断榴莲果树是否需要修枝作业,在需要进行修枝作业时生成作业任务,将作业任务派发到移动终端,种植人员通过移动终端查看修枝作业任务以对榴莲果树进行修枝,使得无需投入人力查看榴莲果树,对榴莲果树是否需要修枝的判断不再依赖个人主观经验,在降低人力成本的同时有助于促进榴莲果树的良好生长,进而提高果树产出。
技术特征:
1.一种榴莲修枝作业管理系统,其特征在于,所述系统包括:
2.根据权利要求1所述的一种榴莲修枝作业管理系统,其特征在于,所述机器人包括带有移动机构的机器人本体,所述机器人本体上设有图像采集机构、第一定位模块、避障传感器、控制主板和通讯模块,所述图像采集机构用于采集榴莲果树图像发送到控制主板,所述第一定位模块用于对机器人的实时位置进行定位,所述避障传感器用于检测机器人行进道路上的障碍物并向控制主板发送信号,所述控制主板用于根据预设行进路线控制机器人行进以及根据避障传感器信号避开行进路线上的障碍物,将榴莲果树图像通过通讯模块上传到服务器。
3.根据权利要求2所述的一种榴莲修枝作业管理系统,其特征在于,所述图像采集机构包括升降机构、多轴机械臂和摄像头,所述升降机构设置于机器人本体顶部,用于驱动多轴机械臂升降,所述多轴机械臂用于改变摄像头的位置和拍摄角度,所述摄像头设置于多轴机械臂的末端,所述升降机构、多轴机械臂分别通过控制电路与控制主板信号相连,所述摄像头与控制主板信号相连。
4.根据权利要求3所述的一种榴莲修枝作业管理系统,其特征在于,所述图像采集机构还包括电子标签读写模块,所述电子标签读写模块设置于多轴机械臂的末端,电子标签读写模块与控制主板信号相连。
5.根据权利要求4所述的一种榴莲修枝作业管理系统,其特征在于,所述系统还包括电子标签,所述电子标签设置在榴莲果树上,用于存储榴莲果树的识别信息。
6.根据权利要求1所述的一种榴莲修枝作业管理系统,其特征在于,所述机器人被配置为执行以下方法:
7.根据权利要求1所述的一种榴莲修枝作业管理系统,其特征在于,所述服务器包括:
8.根据权利要求1所述的一种榴莲修枝作业管理系统,其特征在于,所述移动终端包括:
技术总结
本发明提供一种榴莲修枝作业管理系统,所述系统包括机器人、服务器和移动终端,机器人、移动终端分别与服务器信号相连。所述系统通过机器人采集榴莲果树图像,由服务器通过预训练过的神经网络模型对榴莲果树图像中榴莲果树的树形和枝叶结构进行识别,判断榴莲果树是否需要修枝作业,在需要进行修枝作业时生成作业任务,将作业任务派发到移动终端,种植人员通过移动终端查看修枝作业任务以对榴莲果树进行修枝,使得无需投入人力查看榴莲果树,对榴莲果树是否需要修枝的判断不再依赖个人主观经验,在降低人力成本的同时有助于促进榴莲果树的良好生长,进而提高果树产出。
技术研发人员:冯彦辉,杨福旺,郎海波,杜百忠,田令,吉成雄,苏文跃,徐铭岐
受保护的技术使用者:海南省鸿翔农业集团优旗投资有限公司
技术研发日:
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!