一种平面内复杂限姿协作任务的机器人路径规划方法
本发明涉及关节机器人路径规划,特别涉及一种平面内复杂限姿协作任务的机器人路径规划方法。
背景技术:
1、随着我国制造业的飞速发展和不断进步,关节机器人在工业生产和制造的过程中运用的越来越多,协作生产制造正常进行,例如执行拍照任务时需要高效率和限定位姿,以及打磨任务中的规定方向打磨需要关节机器人限定自己的位姿进行路径规划,这些协作任务需求要求关节机器人在运动时的较高的工作效率以及合理安全的运动路径。在机器人领域,路径规划一直是研究的核心问题。路径规划指从起点开始到终点规划出一条安全且无碰撞的高效路径,并且越来越多应用在复杂及人为干涉困难的环境,这就要求规划出的路径满足路径短、用时少、有效避障等特点。
技术实现思路
1、本发明的目的克服现有技术存在的不足,为实现以上目的,采用一种平面内复杂限姿协作任务的机器人路径规划方法,以解决上述背景技术中提出的问题。
2、一种平面内复杂限姿协作任务的机器人路径规划方法,包括以下步骤:
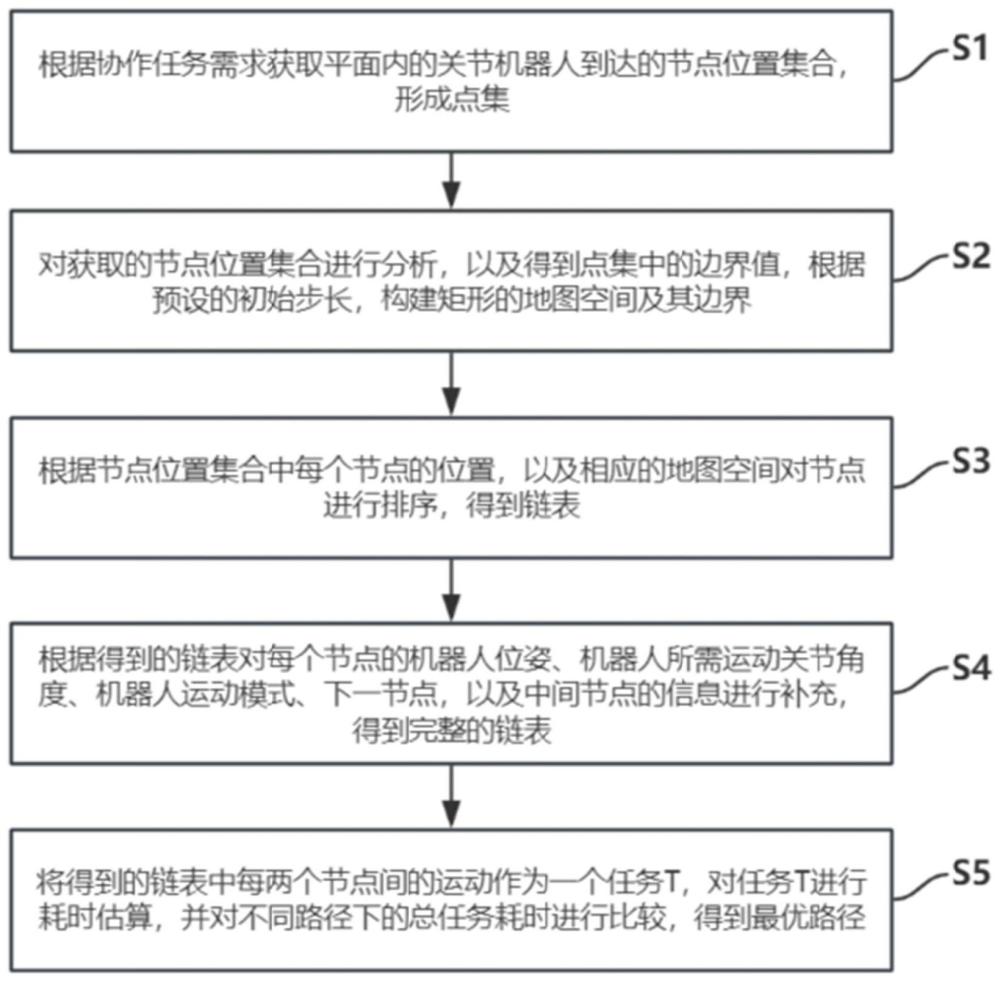
3、步骤s1、根据协作任务需求获取平面内的关节机器人到达的节点位置集合,形成点集;
4、步骤s2、对获取的节点位置集合进行分析,以及得到点集中的边界值,根据预设的初始步长,构建矩形的地图空间及其边界;
5、步骤s3、根据节点位置集合中每个节点的位置,以及相应的地图空间对节点进行排序,得到链表;
6、步骤s4、根据得到的链表对每个节点的机器人位姿、机器人所需运动关节角度、机器人运动模式、下一节点,以及中间节点的信息进行补充,得到完整的链表;
7、步骤s5、将得到的链表中每两个节点间的运动作为一个任务t,对任务t进行耗时估算,并对不同路径下的总任务耗时进行比较,得到最优路径。
8、作为本发明的进一步的方案:所述步骤s1中的具体步骤包括:
9、通过协作任务需求获取关节机器人所要到达的一系列节点位置,得到所获得的平面内的点集。
10、作为本发明的进一步的方案:所述步骤s2中的具体步骤包括:
11、获取关节机器人的关节参数,以及关节末端夹具的尺寸;
12、根据获取的关节参数和夹具尺寸,计算关节机器人在可行区域内的最大地图空间,并进行存储;
13、再基于关节机器人末端坐标系,对获取的一系列关节位置进行存储,装入集合c;
14、根据集合c中的节点的位置,依据不同的区域划分策略,构建不同的地图空间,及其边界。
15、作为本发明的进一步的方案:所述步骤s3中的具体步骤包括:
16、根据步骤s2得到集合c和构建的不同地图空间,选取地图起始节点;
17、从集合c中取出节点,从起始结点开始,根据地图空间对所有节点采用贪心算法,进行以时间为目标的排序,对每一个节点进行下一节点和权重等信息的确定;
18、根据不同的区域划分策略,分别创建链表bnl、链表snl,以及链表pnl,将排序后的节点分别装入链表bnl、链表snl,以及链表pnl中。
19、作为本发明的进一步的方案:所述步骤s4中的具体步骤包括:
20、根据步骤s3中的链表对每个节点的机器人位姿、机器人所需运动关节角度、子节点、中间节点,以及机器人运动模式的信息进行补充,得到完整的链表;
21、其中,机器人运动模式包括线性运动和多轴运动。
22、作为本发明的进一步的方案:所述步骤s5中的具体步骤包括:
23、通过改变初始步长大小,针对不同的区域划分策略所得到的不同链表,进行以时间为标准的寻优,对所有节点找到一条最优的可行路径。
24、与现有技术相比,本发明存在以下技术效果:
25、采用上述的技术方案,通过对协作任务进行解析,获取关节机器人所要到达点集,对得到的节点位置集合进行分析,得到需要的地图空间,根据节点位置集合中每个节点的位置以及相应的地图空间,对每个节点的机器人位姿、机器人所需运动关节角度、机器人运动模式包括线性运动和多轴运动、下一节点以及中间节点等信息进行补充,得到完整的链表,将所述链表中每两个节点间的运动形成一个任务t,对任务t进行耗时估算,并对不同路径下的耗时进行比较,择出最优或次优路径。
26、通过精确解析协作任务,为关节机器人规划出所需到达的点集,并实现了对这些节点的快速、高效且安全的路径规划,显著提升了业务工作的效率。这种方法仅需提供关节机器人、夹具的尺寸以及协作任务的具体位姿信息,就能有效规划路径,从而解决了传统示教方式效率低下的问题。此外,该方法还能有效规避机器人在运行过程中可能遇到的绝大多数奇异点,确保运行的稳定性和安全性。整体设计兼具广泛适用性、简单易行和高度自动化的特点。该算法基于.net平台开发,结构简洁、操作便捷,且实验表明其成功率高达90%以上,展现出极高的实用价值和广阔的应用前景。
技术特征:
1.一种平面内复杂限姿协作任务的机器人路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种平面内复杂限姿协作任务的机器人路径规划方法,其特征在于,所述步骤s1中的具体步骤包括:
3.根据权利要求1所述一种平面内复杂限姿协作任务的机器人路径规划方法,其特征在于,所述步骤s2中的具体步骤包括:
4.根据权利要求2所述一种平面内复杂限姿协作任务的机器人路径规划方法,其特征在于,所述步骤s3中的具体步骤包括:
5.根据权利要求4所述一种平面内复杂限姿协作任务的机器人路径规划方法,其特征在于,所述步骤s4中的具体步骤包括:
6.根据权利要求1所述一种平面内复杂限姿协作任务的机器人路径规划方法,其特征在于,所述步骤s5中的具体步骤包括:
技术总结
本发明公开了一种平面内复杂限姿协作任务的机器人路径规划方法,包括根据协作任务需求获取平面内的关节机器人到达的节点位置集合,形成点集;对获取的节点位置集合进行分析,以及得到点集中的边界值,根据预设的初始步长,构建矩形的地图空间及其边界;根据节点位置集合中每个节点的位置,以及相应的地图空间对节点进行排序,得到链表;根据得到的链表对每个节点的机器人位姿、机器人所需运动关节角度、机器人运动模式、下一节点,以及中间节点的信息进行补充,得到完整的链表;对任务T进行耗时估算,并对不同路径下的总任务耗时进行比较,得到最优路径。本发明不仅简单易行、自动化程度高、工作效率高,还可以进行关节机器人奇异点的规避。
技术研发人员:吴焱明,吴浩东,刘翀,梁庆彦,韩泽翔,许鑫龙,杨大松
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!