一种基于深度神经网络的机械臂运动规划方法和系统
本发明涉及计算机,具体为一种基于深度神经网络的机械臂运动规划方法和系统。
背景技术:
1、空间中的机械臂路径规划因其复杂的配置而一直是一个具有挑战性的问题。随着机器人技术的发展,机械臂应用需要快速高效的运动规划算法。但当机械臂工作空间维度增加,会导致碰撞检测例程计算成本的增加,从而使得现有的运动规划方法变得不太有效。
2、例如针对多自由度机械臂空间中的运动规划,传统基于采样的算法随着机械臂工作空间维度增加,会导致碰撞检测例程计算成本的大大增加,从而使得运动规划方法变得不太有效,收敛到最优解的速度较慢,且初始路径的质量无法保证。
3、又例如自适应采样是通过对更有可能包含最佳路径解决方案的配置空间的特定区域进行采样来加速基于采样的运动规划算法的方法之一。尽管自适应采样的算法有很多种,但它们都依赖于手工设计的启发式算法。此外,它们的性能在高维空间中显着下降。
4、总之,目前基于神经网络的机械臂运动规划算法,或通过神经网络对机械臂自由配置空间进行预测,或通过神经网络对机械臂配置状态进行预测,这些现有方法虽然在一定程度上减少了路径规划时间,但仍需要消耗一定的采样和计算,且这些方法都不包含路径优化,规划出的路径质量很难保证。
技术实现思路
1、有鉴于此,本发明提供一种基于深度神经网络的机械臂运动规划方法和系统,以至少解决上述问题。
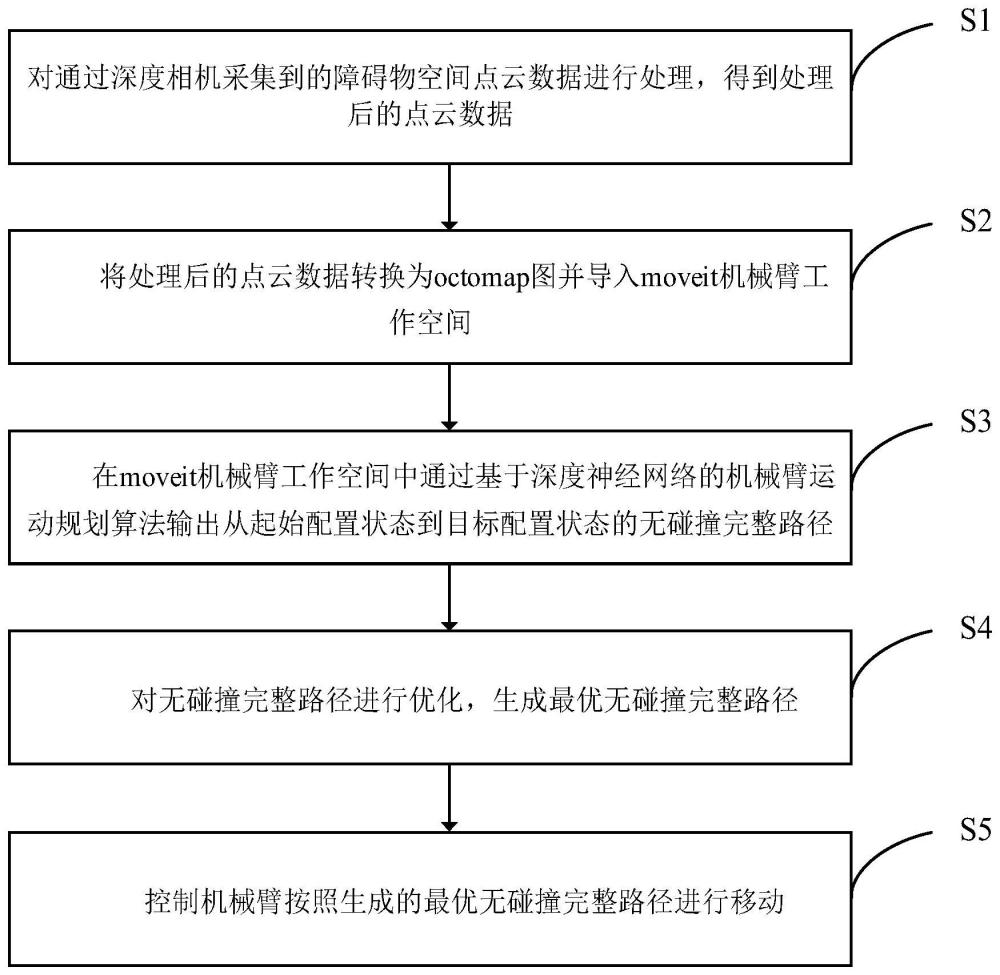
2、本发明提供的一种基于深度神经网络的机械臂运动规划方法,包括:对通过深度相机采集到的障碍物空间点云数据进行处理,得到处理后的点云数据;将处理后的点云数据转换为octomap图并导入moveit机械臂工作空间;在moveit机械臂工作空间中通过基于深度神经网络的机械臂运动规划算法输出从起始配置状态到目标配置状态的无碰撞完整路径;对无碰撞完整路径进行优化,生成最优无碰撞完整路径;控制机械臂按照生成的最优无碰撞完整路径进行移动。
3、在一种实现方式中,所述moveit机械臂工作空间中通过基于深度神经网络的机械臂运动规划算法输出从起始配置状态到目标配置状态的无碰撞完整路径,包括:步骤a,给定一组机械臂的起始配置状态及目标配置状态,通过训练好的深度神经网络模型预测机械臂的下一配置状态,并将该下一配置状态记为中间配置状态;步骤b,通过碰撞检查器检查从起始配置状态至中间配置状态之间是否存在碰撞,若起始配置状态至中间配置状态之间无碰撞,则将中间配置状态写入路径,若起始配置状态至中间配置状态之间存在碰撞,则返回,重新进行路径规划;步骤c,当检查出起始配置状态至中间配置状态之间无碰撞,再检查中间配置状态至目标配置状态之间是否碰撞,若中间配置状态至目标配置状态之间无碰撞,则路径探索结束,输出无碰撞完整路径,若中间配置状态至目标配置状态之间存在碰撞,则进行迭代,将中间配置状态记为起始配置状态,重复步骤a-c继续路径规划,直至找出由起始配置状态到目标配置状态的无碰撞完整路径。
4、在另一种实现方式中,深度神经网络模型的输入为机械臂的一组起始配置状态及目标配置状态,深度神经网络模型的输出为机械臂的下一时刻配置状态。
5、在另一种实现方式中,深度神经网络模型的损失函数为:
6、
7、其中,np是数据集中路径样本的数量,是路径样本的集合。
8、在另一种实现方式中,所述对无碰撞完整路径进行优化,生成最优无碰撞完整路径,包括:在机械臂关节空间内对无碰撞完整路径重新进行等间距采样,将整条无碰撞完整路径分割为若干段;将进行等间距采样得到的所有采样点两两连线,在每两个采样点连线之间进行碰撞检测,将检测出无碰撞的采样点之间的路径节点省略,连接剩余采样点,得到最优无碰撞完整路径。
9、根据本发明实施例的第二方面,提供了一种基于深度神经网络的机械臂运动规划系统,包括:机械臂、数据处理模块、转换模块、路径规划模块、优化模块及移动模块,其中各模块与机械臂之间通信连接;数据处理模块,用于对通过深度相机采集到的障碍物空间点云数据进行处理,得到处理后的点云数据;转换模块,用于将处理后的点云数据转换为octomap图并导入moveit机械臂工作空间;路径规划模块,用于在moveit机械臂工作空间中通过基于深度神经网络的机械臂运动规划算法输出从起始配置状态到目标配置状态的无碰撞完整路径;优化模块,用于对无碰撞完整路径进行优化,生成最优无碰撞完整路径;移动模块,用于控制机械臂按照生成的最优无碰撞完整路径进行移动。
10、综上,本发明通过提出深度神经网络对某一时刻机械臂配置状态进行预测,通过碰撞检测和双向迭代探索,进一步减少机械臂避障规划过程中的计算量,大大加快路径规划速度,缩短路径规划时间,同时保证了规划出的路径接近于最优路径。
技术特征:
1.一种基于深度神经网络的机械臂运动规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述moveit机械臂工作空间中通过基于深度神经网络的机械臂运动规划算法输出从起始配置状态到目标配置状态的无碰撞完整路径,包括:
3.根据权利要求2所述的方法,其特征在于,深度神经网络模型的输入为机械臂的一组起始配置状态及目标配置状态,深度神经网络模型的输出为机械臂的下一时刻配置状态。
4.根据权利要求3所述的方法,其特征在于,深度神经网络模型的损失函数为:
5.根据权利要求1所述的方法,其特征在于,所述对无碰撞完整路径进行优化,生成最优无碰撞完整路径,包括:
6.一种基于深度神经网络的机械臂运动规划系统,其特征在于,包括:
技术总结
本发明提供一种基于深度神经网络的机械臂运动规划方法和系统。该方法包括对通过深度相机采集到的障碍物空间点云数据进行处理,得到处理后的点云数据;将处理后的点云数据转换为octomap图并导入moveit机械臂工作空间;在moveit机械臂工作空间中通过基于深度神经网络的机械臂运动规划算法输出从起始配置状态到目标配置状态的无碰撞完整路径;对无碰撞完整路径进行优化,生成最优无碰撞完整路径;控制机械臂按照生成的最优无碰撞完整路径进行移动。本发明提出深度神经网络对某一时刻机械臂配置状态进行预测,通过碰撞检测和双向迭代探索减少机械臂避障规划过程中的计算量,大大加快路径规划速度,缩短路径规划时间,同时保证了规划出的路径接近于最优路径。
技术研发人员:程俊,任余杰,卞昊扬,吴俊
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/8/1
- 还没有人留言评论。精彩留言会获得点赞!