一种变电站多功能排障带电作业机器人的制作方法
本发明属于电网机器人,具体涉及一种变电站多功能排障带电作业机器人。
背景技术:
1、配电设备作为电网的基础,投入运行后,受到老化、天气以及人为操作等各种内部或外部因素的共同作用,通常会使配电设备的性能下降,导致配电设备发生各种故障退出运行,而设备故障退出运行,会给电网的安全可靠运行带来极大的危害,因此,及时地对配电设备进行检修,已成为电网日常生产管理不可或缺的工作。
2、高压变电站是输变电工程当中重要的枢纽站,为了保障输变电系统的稳定运行,各级变电站都需要定期对滤波器场围栏进行维护;变电站围栏带电运行期间,其内部会生长杂草、掉落树枝、设备内壁粘连异物等,时刻威胁设备运行的稳定性,针对带电围栏的维护,普遍采用停电人工检修的方式,且在变电站围栏带电运行期间,检修人员从外部观察到围栏内设备的情况,不能及时对设备做维护,存在安全隐患。
技术实现思路
1、针对现有技术中存在针对带电围栏的维护,普遍采用停电人工检修的方式,且在变电站围栏带电运行期间,检修人员从外部观察到围栏内设备的情况,不能及时对设备做维护,存在安全隐患的缺陷,本发明提供一种变电站多功能排障带电作业机器人,以解决上述技术问题。
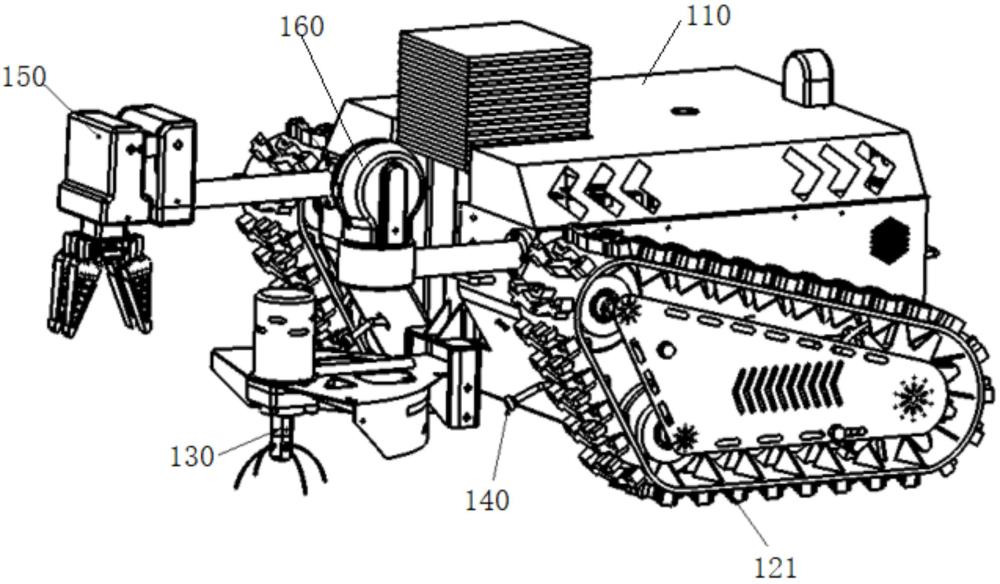
2、第一方面,本发明提供一种变电站多功能排障带电作业机器人,包括车机本体、控制模块、作业模块、行走模块、通信模块和遥控模块,控制模块、作业模块、行走模块和通信模块均设置在车机本体上,作业模块、行走模块和通信模块均与控制模块电连接,控制模块与遥控模块通讯连接;作业模块包括除草机构、药剂喷洒机构、异物抓取机构和故障勘察机构。
3、本技术方案的进一步改进还有,行走模块包括轮式驱动单元或履带式驱动单元。
4、本技术方案的进一步改进还有,轮式驱动单元包括设置在车机本体两侧的驱动电机,以及和驱动电机输出端连接的驱动轮。
5、本技术方案的进一步改进还有,履带式驱动单元包括设置在车机本体两侧的履带底盘,以及为履带底盘提供驱动力的第一无刷电机。
6、本技术方案的进一步改进还有,履带底盘采用摆臂式履带底盘。
7、本技术方案的进一步改进还有,除草机构包括第二无刷电机、轴承组件、刀头、保护罩、第一连接件和高度调节组件,高度调节组件设置在车机本体的前端,第一连接件的一端与高度调节组件连接,无刷电机安装在第一连接件的另一端,无刷电机的输出端通过贯穿第一连接件的轴承组件连接到刀头。
8、本技术方案的进一步改进还有,刀头的外围还设置有可拆卸的保护罩。
9、本技术方案的进一步改进还有,药剂喷洒机构包括药箱、水泵和雾化喷头,药箱采用隐藏式设计,设置在车机本体的前端,水泵设置在药箱内,水泵的出水端通过输水管路连接到雾化喷头。
10、本技术方案的进一步改进还有,异物抓取机构包括连接杆、伸缩组件、扭力舵机和机械爪,连接杆的一端固定安装在车机本体的前端,扭力舵机通过伸缩组件安装在连接杆的另一端,机械爪活动安装在扭力舵机上。
11、本技术方案的进一步改进还有,故障勘察机构包括伸缩式探测臂和高清摄像头,伸缩式探测臂的一端设置在车机本体的前端,高清摄像头安装在伸缩式探测臂的另一端。
12、本发明的有益效果在于,本发明采用无线遥控方式,配备多种作业工具,可随时进入带电围栏作业,清除杂草等异物,且能够通过故障勘察机构观察围栏内部设备的运行情况,避免因停电而造成的损失和影响。
13、此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
技术特征:
1.一种变电站多功能排障带电作业机器人,其特征在于,包括车机本体、控制模块、作业模块、行走模块、通信模块和遥控模块,控制模块、作业模块、行走模块和通信模块均设置在车机本体上,作业模块、行走模块和通信模块均与控制模块电连接,控制模块与遥控模块通讯连接;作业模块包括除草机构、药剂喷洒机构、异物抓取机构和故障勘察机构。
2.根据权利要求1所述的变电站多功能排障带电作业机器人,其特征在于,行走模块包括轮式驱动单元或履带式驱动单元。
3.根据权利要求2所述的变电站多功能排障带电作业机器人,其特征在于,轮式驱动单元包括设置在车机本体两侧的驱动电机,以及和驱动电机输出端连接的驱动轮。
4.根据权利要求2所述的变电站多功能排障带电作业机器人,其特征在于,履带式驱动单元包括设置在车机本体两侧的履带底盘,以及为履带底盘提供驱动力的第一无刷电机。
5.根据权利要求4所述的变电站多功能排障带电作业机器人,其特征在于,履带底盘采用摆臂式履带底盘。
6.根据权利要求1所述的变电站多功能排障带电作业机器人,其特征在于,除草机构包括第二无刷电机、轴承组件、刀头、保护罩、第一连接件和高度调节组件,高度调节组件设置在车机本体的前端,第一连接件的一端与高度调节组件连接,无刷电机安装在第一连接件的另一端,无刷电机的输出端通过贯穿第一连接件的轴承组件连接到刀头。
7.根据权利要求6所述的变电站多功能排障带电作业机器人,其特征在于,刀头的外围还设置有可拆卸的保护罩。
8.根据权利要求1所述的变电站多功能排障带电作业机器人,其特征在于,药剂喷洒机构包括药箱、水泵和雾化喷头,药箱采用隐藏式设计,设置在车机本体的前端,水泵设置在药箱内,水泵的出水端通过输水管路连接到雾化喷头。
9.根据权利要求1所述的变电站多功能排障带电作业机器人,其特征在于,异物抓取机构包括连接杆、伸缩组件、扭力舵机和机械爪,连接杆的一端固定安装在车机本体的前端,扭力舵机通过伸缩组件安装在连接杆的另一端,机械爪活动安装在扭力舵机上。
10.根据权利要求1所述的变电站多功能排障带电作业机器人,其特征在于,故障勘察机构包括伸缩式探测臂和高清摄像头,伸缩式探测臂的一端设置在车机本体的前端,高清摄像头安装在伸缩式探测臂的另一端。
技术总结
本发明属于电网机器人技术领域,具体提供一种变电站多功能排障带电作业机器人,包括车机本体、控制模块、作业模块、行走模块、通信模块和遥控模块,控制模块、作业模块、行走模块和通信模块均设置在车机本体上,作业模块、行走模块和通信模块均与控制模块电连接,控制模块与遥控模块通讯连接;作业模块包括除草机构、药剂喷洒机构、异物抓取机构和故障勘察机构。本发明采用无线遥控方式,配备多种作业工具,可随时进入带电围栏作业,清除杂草等异物,观察围栏内部设备的运行情况,避免因停电而造成的损失和影响。
技术研发人员:任崇广
受保护的技术使用者:山东孚岳电气有限公司
技术研发日:
技术公布日:2024/6/26
- 还没有人留言评论。精彩留言会获得点赞!