一种用于绳索牵引灵巧手的手指结构总成
本发明涉及机械结构,尤其协作机器人领域,具体涉及一种用于绳索牵引仿人灵巧手的手指结构总成。
背景技术:
1、灵巧手是机器人的重要组成部分,用来执行抓取和操作功能,作为机器人的末端执行装置,对机器人的性能有着及其重要的影响。随着机器人技术的不断发展人们对于机器人性能的要求也随之不断提高。灵巧手是用来解决在机器人实际工作中遇到的复杂物体抓取、稳定可靠操作等问题。
2、绳索牵引灵巧手作为柔性协作机器人的末端执行器,协助或代替人类进行日常生活中的一系列操作任务。相比于传统的刚性工业机器人执行器,由于绳索具有固有柔性,绳索牵引灵巧手能够更加安全地应用在人类日常工作场景。绳索牵引灵巧手基于仿肌腱牵引机制,利用腱绳、滑轮和腱鞘结构实现对人类肌肉-肌腱结构的模拟,能够将牵引后置于远离手指的非操作区域,大大降低了机器人的末端负载和惯量。由于绳索存在一定的弹性变形且腱鞘结构能够传递的绳索张力有限,因此一般的绳索牵引灵巧手都具有很低的刚度和指尖力,无法胜任大部分人手的任务场景。
3、因此,如何提高绳索牵引灵巧手的末端刚度和指尖力,同时保证灵巧手具有类人手的灵活度,是目前亟需解决的问题。
4、有鉴于此,特提出本发明。
技术实现思路
1、本发明的目的是提供了一种用于绳索牵引灵巧手的手指结构总成,能够提高绳索牵引灵巧手的末端刚度和指尖力,具有人手相同的自由度和高于人手的工作空间,同时实现了接近人手的指尖力和关节刚度水平。同时结构简单,使用便捷,安装容易,具有良好的实用性。
2、本发明的目的是通过以下技术方案实现的:
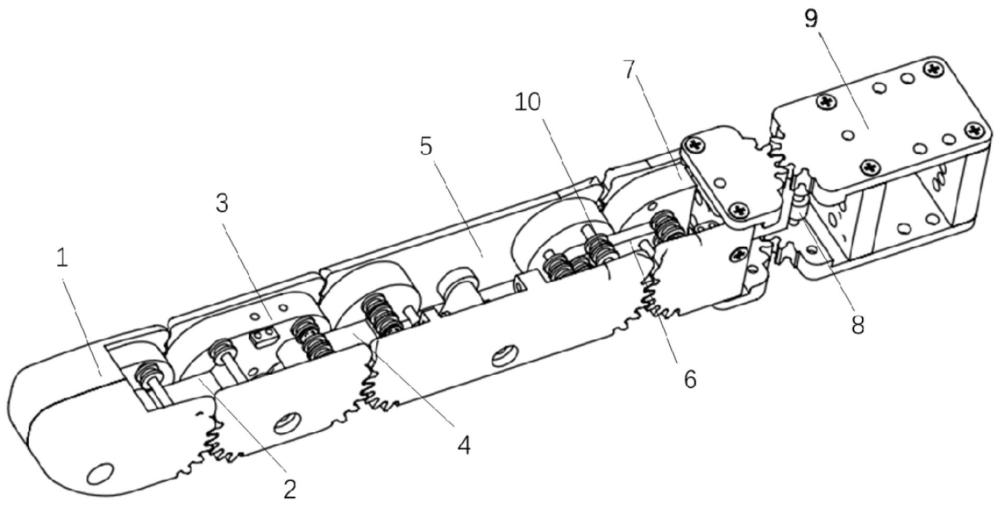
3、一种用于绳索牵引灵巧手的手指结构总成,包括由远端到近端依次铰接连接的远节指骨连杆1、dip关节连杆2、中节指骨连杆3、pip关节连杆4、近节指骨连杆5、mcp弯曲关节连杆6、侧展指骨连杆7、mcp侧展关节连杆8与手指支座9;
4、所述的远节指骨连杆1与中节指骨连杆3的两侧端板间、中节指骨连杆3与近节指骨连杆5的两侧端板间、近节指骨连杆5与侧展指骨连杆7的两侧端板间及侧展指骨连杆7与手指支座9的上下端板间通过齿轮啮合实现滚动运动连接的滚动关节;
5、所述的滚动关节沿滚动方向的两侧分别对称设有张力放大装置10;8条绳索一端分别固定于相对近端的连杆内,另一端缠绕张力放大装置10后延伸至近端由手指支座9引出,再连接操控机构,由操控机构各绳索实现手指的运动。
6、所述的张力放大装置10包括定滑轮组20与动滑轮组19;所述的定滑轮组20通过与所属的滚动关节的各连杆间的铰接轴23平行的导向分配销轴21安装于近端的指骨连杆或手指支座内;
7、所述的动滑轮组19通过与所属的滚动关节的各连杆间的铰接轴平行的导向分配销轴21安装于远端的指骨连杆内;
8、所述的绳索一端固定于安装有定滑轮组20的连杆内,另一端往复多次绕过定滑轮组20与定滑轮组20的各滑轮,向近端延伸,由手指支座9引出。
9、所述的远节指骨连杆1与中节指骨连杆3间的滚动关节处的两个张力放大装置10引出的两条绳索在中节指骨连杆3内交叉后由所述的中节指骨连杆3与近节指骨连杆5间的滚动关节处的两个张力放大装置10外侧绕过,再分别绕过导向分配销轴21上的第一导向滑轮22,再沿外-内-外的s路径绕过mcp弯曲关节连杆6的两铰接轴上安装的第一导向滑轮22,延伸至手指支座9引出;和/或;
10、所述的中节指骨连杆3与近节指骨连杆5间的滚动关节处的两个张力放大装置10引出的两条绳索分别绕过导向分配销轴21上的第一导向滑轮22,再沿外-内-外的s路径绕过mcp弯曲关节连杆6的两铰接轴上安装的第一导向滑轮22,延伸至手指支座9引出;和/或;
11、所述的近节指骨连杆5与侧展指骨连杆7间的滚动关节处的两个张力放大装置10的引出的两条绳索延伸至手指支座9引出;和/或;
12、所述的侧展指骨连杆7与手指支座9间的滚动关节处的两个张力放大装置10引出的两条绳索由手指支座9内引出。
13、所述的远节指骨连杆1包括固定连接的左远节指骨端板101与右远节指骨端板102,左远节指骨端板101与右远节指骨端板102的近端边设有不完全齿轮的轮齿;
14、所述的左远节指骨端板101与右远节指骨端板102内近端安装动滑轮组19;动滑轮组19包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装。
15、所述的中节指骨连杆3包括固定连接的左中节指骨端板301与右中节指骨端板302,左中节指骨端板301与右中节指骨端板302的远端边与近端边均设有不完全齿轮的轮齿;
16、所述的左中节指骨端板301与右中节指骨端板302内近端安装动滑轮组19;动滑轮组19包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装,且固定销轴12上还设有第二导向滑轮24;
17、所述的左中节指骨端板301与右中节指骨端板302内远端安装定滑轮组20;定滑轮组20包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装。
18、所述的近节指骨连杆5包括固定连接的左近节指骨端板501与右近节指骨端板502,左近节指骨端板501与右近节指骨端板502的远端边与近端边均设有不完全齿轮的轮齿;
19、所述的左近节指骨端板501与右近节指骨端板502内近端安装动滑轮组19;动滑轮组19包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装;
20、所述的左近节指骨端板501与右近节指骨端板502内远端安装定滑轮组20;定滑轮组20包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装,且固定销轴12上还设有第二导向滑轮24。
21、所述的左近节指骨端板501与右近节指骨端板502内还通过两个导向分配销轴21各安装一组第一导向滑轮22。
22、所述的侧展指骨连杆7包括固定连接的左侧展指骨端板701、右侧展指骨端板702、上侧展指骨端板703与下侧展指骨端板704,左侧展指骨端板701与右侧展指骨端板702的远端边设有不完全齿轮的轮齿;上侧展指骨端板703与下侧展指骨端板704近端边设有不完全齿轮的轮齿;
23、所述的左侧展指骨端板701与右侧展指骨端板702内远端安装定滑轮组20;定滑轮组20包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装;
24、所述的上侧展指骨端板703与下侧展指骨端板704内近端安装动滑轮组19;动滑轮组19包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装。
25、所述的手指支座9包括通过两块限位板17固定连接成框架的上侧手指支座端板901与下侧手指支座端板902;上侧手指支座端板901与下侧手指支座端板902远端边设有不完全齿轮的轮齿;
26、所述的上侧手指支座端板901与下侧手指支座端板902内远端安装定滑轮组20;定滑轮组20包括至少一个滑轮13,滑轮13通过与各连杆间的铰接轴23平行的固定销轴12安装。
27、所述的mcp弯曲关节连杆6包括通过两个连接柱603连接的左mcp关节端板601与右mcp关节端板602;且在左mcp关节端板601与右mcp关节端板602间的铰接轴23上设有一组第一导向滑轮22。
28、与现有技术相比,本发明所提供的用于绳索牵引灵巧手的手指结构总成,能够提高绳索牵引灵巧手的末端刚度和指尖力,具有人手相同的自由度和高于人手的工作空间,同时实现了接近人手的指尖力和关节刚度水平。同时结构简单,使用便捷,安装容易,具有良好的实用性。
- 还没有人留言评论。精彩留言会获得点赞!