一种多机器人系统的任务规划方法、装置、介质及产品
本发明涉及机器人任务规划,特别是涉及一种时序逻辑任务约束下的多机器人系统的任务规划方法、装置、介质及产品。
背景技术:
1、传统的运动规划包括生成从起点到达目标区域的机器人轨迹,同时避开障碍物。点对点导航的方法有利用势场和导航函数,也有基于采样的算法。最近,一类新的规划方法被提出,可以处理比经典的点对点导航更丰富的任务类别。这些任务可以是排序或覆盖,数据收集等,并且可以使用形式语言捕获,即线性时间逻辑(linear temporal logic,ltl)任务规划。
2、在复杂任务下,移动机器人的任务规范由ltl公式捕获,当系统中的各智能体拥有各自的任务规范时,一般考虑自下而上的的方法,当描述整体任务的全局ltl公式需要被分配给机器人团队时,采用自上而下的方法。在实际情况中,人们往往不只会在意任务的完成情况,也会在意机器人的运行成本,ltl规范下的最优任务序列问题在smith s l、guo m,xluo和jwang的工作中得到了解决,从而形成了最经典的时序逻辑任务规划框架。具体地说,取有限加权切换系统(weighted state transition system,wts)和不确定性büchi自动机(nondeterministic büchi automaton,nba)的笛卡尔乘积,可以构造一个同步产品自动机。然后,利用dijkstra算法在同步产品自动机成功的找到了最优路径,实验结果很好的体现这一算法的可行性。对于多机器人系统,smith s l通过将各机器人的加权切换系统构造为团队加权切换系统,同样构建团队product自动机,使用图搜索技术得到最优运动计划。dkhalidi在其工作中提出了一种新的规划算法t*,它利用a*搜索过程机会地生成满足时间逻辑查询的最优轨迹。实验结果表明,其比经典的算法实现了一个数量级的改进。然而,随着机器人数量的增加或nba规模的扩大,产品自动机的状态空间呈指数级增长,使得图搜索技术难以有效求解。
3、不同于图搜索的思路,在karaman s的工作中,提出了一种基于采样的算法,该算法增量地构建kripke结构,直到它具有足够的表达能力来生成满足以确定性μ-微积分表示的任务规范的运动计划。在rrt*算法的启发下,kantaros y提出了一种全局时间规范下的多机器人系统最优任务规划算法,该算法避免了在过渡系统和nba之间明确构建product自动机,而通过一个基于采样的方式增量式构建有向树。该有向树近似地表示同步产品自动机的状态空间和状态之间的转换,最后通过回溯得到最优任务序列。
4、然而,对于很多时序逻辑约束,各任务间存在先后依赖关系。kantaros y提出的算法的采样方式没有考虑到nba的约束,而是采样之后再进行检验,这导致了其采样质量低下,在面对存在较多先后依赖关系的ltl约束时难以有效求解,求解效率和效果不理想。xluo利用büchi自动机进行有偏采样,但任务场景偏向路径规划并且对自动机信息利用不够充分。
技术实现思路
1、本发明的目的是提供一种多机器人系统的任务规划方法、装置、介质及产品,可提高任务规划效率和质量。
2、为实现上述目的,本发明提供了如下方案:
3、一种多机器人系统的任务规划方法,包括:
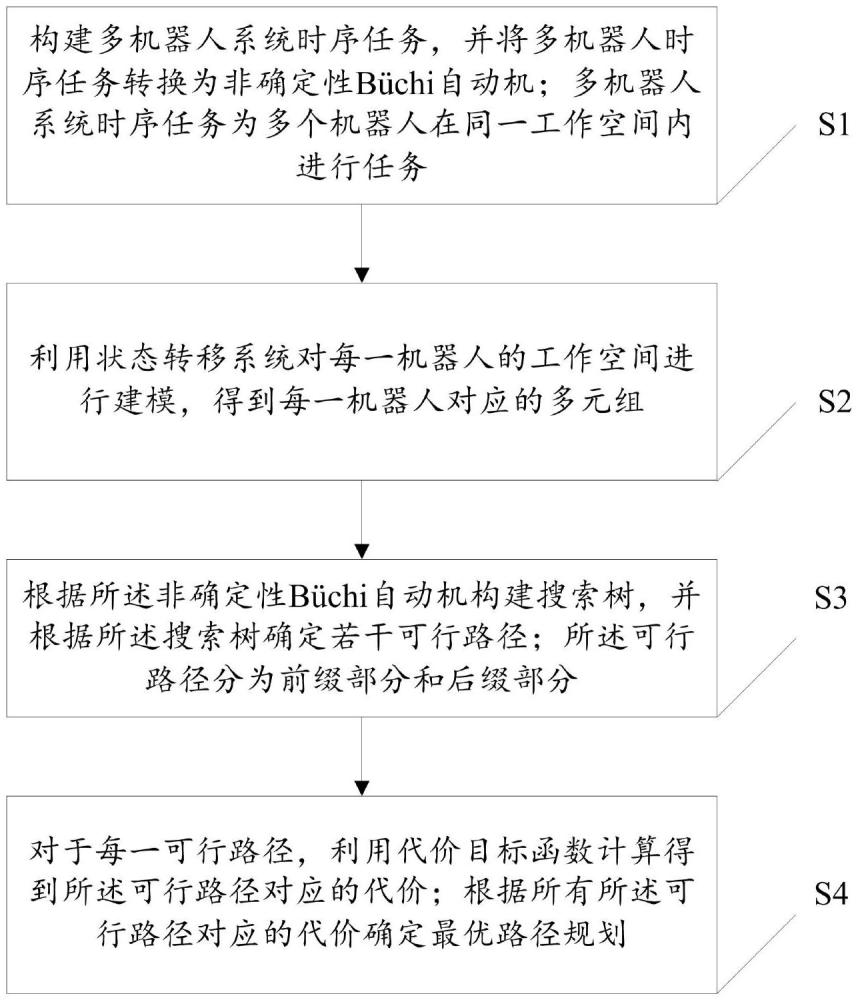
4、构建多机器人时序任务,并将多机器人时序任务转换为非确定性büchi自动机;多机器人时序任务为多个机器人在同一工作空间内进行任务;
5、利用状态转移系统对每一机器人的工作空间进行建模,得到每一机器人对应的多元组wtsi;
6、根据所述非确定性büchi自动机构建搜索树,并根据所述搜索树确定若干可行路径;所述可行路径分为前缀部分和后缀部分;
7、对于每一可行路径,利用成本目标函数计算得到每一所述可行路径对应的成本代价;根据所有所述可行路径对应的成本代价确定最优路径规划。
8、一种计算机装置,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述一种多机器人系统的任务规划方法的步骤。
9、一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述一种多机器人系统的任务规划方法的步骤。
10、一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述一种多机器人系统的任务规划方法的步骤。
11、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供了一种多机器人系统的任务规划方法、装置、介质及产品,构建多机器人时序任务,并将多机器人时序任务转换为非确定性büchi自动机;多机器人时序任务为多个机器人在同一工作空间内进行任务;利用状态转移系统对每一机器人的工作空间进行建模,得到每一机器人对应的多元组wtsi,根据非确定性büchi自动机构建搜索树,并根据搜索树确定若干可行路径;可行路径分为前缀部分和后缀部分;对于每一可行路径,利用成本目标函数计算得到每一可行路径对应的成本代价;根据所有可行路径对应的成本代价确定最优路径规划。本发明根据非确定性büchi自动机构建搜索树,且考虑到每个机器人的任务可行区域,提高了采样点的质量,并显著提高了算法解的最优性、稳定性以及效率。
技术特征:
1.一种多机器人系统的任务规划方法,其特征在于,包括:
2.根据权利要求1所述的一种多机器人系统的任务规划方法,其特征在于,还包括:定义非确定性büchi自动机为一多元组其中,qb是非确定性büchi自动机中的状态集合;表示非确定性büchi自动机的初始状态;σ=2ap为字符表;表示非确定性büchi自动机中的状态转移关系;表示非确定性büchi自动机的可接受或终止状态。
3.根据权利要求1所述的一种多机器人系统的任务规划方法,其特征在于,还包括:定义机器人对应的多元组wtsi如下:
4.根据权利要求1所述的一种多机器人系统的任务规划方法,其特征在于,根据所述非确定性büchi自动机构建搜索树,具体包括:
5.根据权利要求4所述的一种多机器人系统的任务规划方法,其特征在于,在得到当前采样点之后,还包括:
6.一种计算机装置,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-5中任一项所述一种多机器人系统的任务规划方法的步骤。
7.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-5中任一项所述一种多机器人系统的任务规划方法的步骤。
8.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-5中任一项所述一种多机器人系统的任务规划方法的步骤。
技术总结
本发明公开了一种多机器人系统的任务规划方法、装置、介质及产品,涉及机器人任务规划技术领域,该方法包括:构建多机器人时序任务,将多机器人时序任务转换为非确定性Büchi自动机;利用状态转移系统对每一机器人的工作空间进行建模,得到每一机器人对应的多元组,根据非确定性Büchi自动机构建搜索树,并根据搜索树确定若干可行路径;可行路径分为前缀部分和后缀部分;利用成本目标函数计算得到每一可行路径对应的成本代价;根据所有可行路径对应的成本代价确定最优路径规划。本发明根据非确定性Büchi自动机构建搜索树,且考虑到每个机器人的任务可行区域,提高了采样点的质量,并显著提高了算法解的最优性、稳定性以及效率。
技术研发人员:李晓多,罗炯,化永朝,董希旺,于江龙,冯智,刘亦石,吕金虎
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/8/27
- 还没有人留言评论。精彩留言会获得点赞!