一种具有仿生肌肉的机器人的制作方法
本申请涉及机器人,尤其涉及一种具有仿生肌肉的机器人。
背景技术:
1、机器生物包括人形机器人、动物仿生机器人(机器狗)等已经在人类社会中广泛存在,进入到用户家庭中,通过人工智能大模型自主学习的能力与人类从语言沟通到肢体互动,与人类建立亲密联系的过程中需要机器人可以与人类进行肢体上亲密的接触互动,那么对于机器人关节的互动灵活性和身体柔软性要求很高,满足互动的灵活性,触感的柔软性和交互的自然性就可以与人类建立亲密关系。
2、目前传统的生产型机器人多采用刚性外壳设计,使用金属、塑料等刚性材料包裹内部活动结构,与人互动动作和触感较为僵硬,主要作为生产工具出现在工作场景中使用;另一部分家用机器人使用关节设计限制的设计方式,使得机器人关节只能在平面范围内活动,无法完成复杂的肢体交互动作,完成情感交互动作精细度和柔韧性不足。除此之外,机器人只在身体静态区域覆盖柔性材料,而关节部分分割暴露,全身肌肉触感模拟不足,且活动过程中柔性材料的褶皱严重,尤其是肌肉组织配合关节进行拉伸、旋转、扭曲等复杂运动时更为明显。
技术实现思路
1、本申请提供了一种具有仿生肌肉的机器人,解决了现有机器人多采用刚性外壳设计,与人互动动作和触感较为僵硬,完成情感交互动作精细度和柔韧性不足,全身肌肉触感模拟不足的技术问题。
2、有鉴于此,本申请提供了一种具有仿生肌肉的机器人,包括:
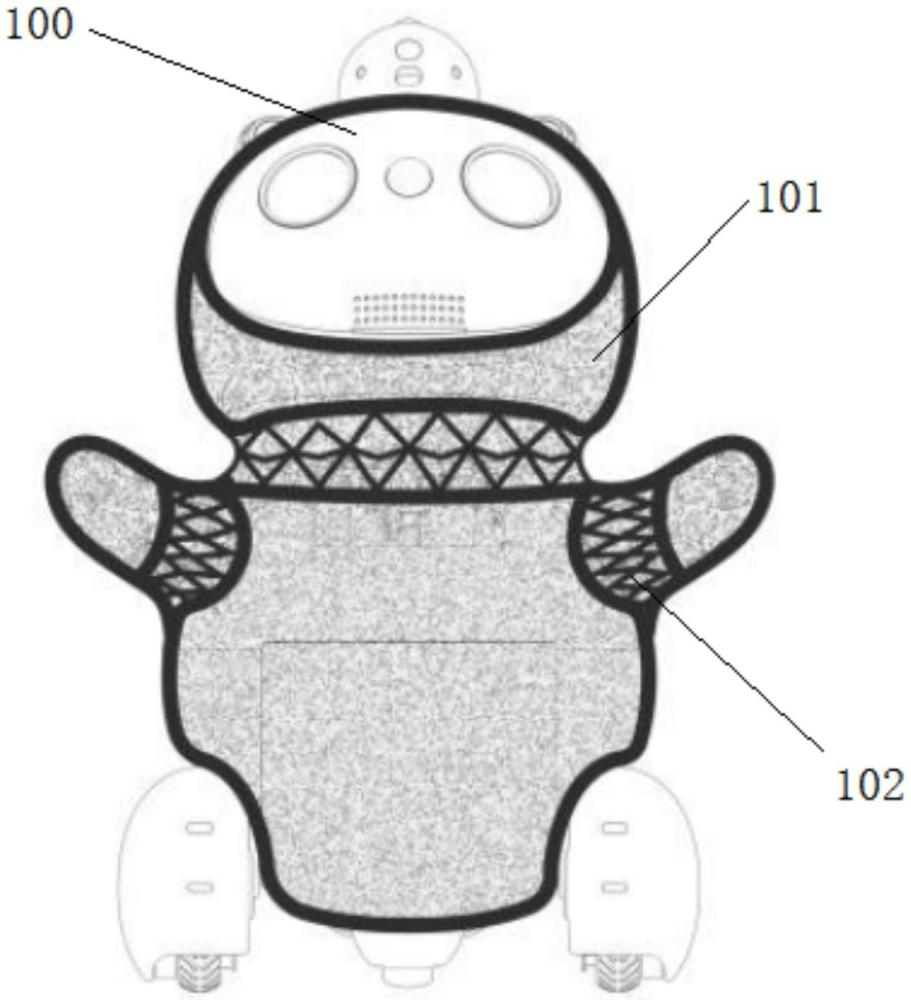
3、机器人本体,所述机器人本体包含静态贴合区域、活动关节区域以及刚性支架;
4、在所述静态贴合区域填充有第一厚度的柔性记忆伸缩性材料与弹性面料构成的第一复合材料,其中所述弹性面料通过包裹所述第一厚度的柔性记忆伸缩性材料与所述机器人本体的所述静态贴合区域填充连接;
5、在所述活动关节区域贴附有第二厚度的柔性记忆伸缩性材料与弹性面料构成的第二复合材料,其中所述第二厚度的柔性记忆伸缩性材料通过内外侧绗缝所述弹性布料包裹所述机器人本体的所述活动关节区域。
6、可选地,所述第二复合材料中弹性面料绗缝有预设图案。
7、可选地,所述预设图案包括十字纹理图案、菱形纹理纹理、回型纹理图案、条形纹理图案和/或螺旋纹理图案。
8、可选地,所述弹性面料还具有耐磨性。
9、可选地,所述第一厚度的柔性记忆伸缩性材料与弹性面料构成的第一复合材料具体为10mm的聚氨酯发泡复合尼龙混纺面料。
10、可选地,所述第二厚度的柔性记忆伸缩性材料与弹性面料构成的第二复合材料具体为4mm的聚氨酯发泡复合尼龙混纺面料。
11、可选地,所述静态贴合区域包括机器人本体的躯干、头部、四肢以及尾巴。
12、可选地,所述活动关节区域包括机器人本体的颈部关节、肩部关节以及四肢关节。
13、从以上技术方案可以看出,本申请实施例具有以下优点:
14、本申请中,提供了一种具有仿生肌肉的机器人,包括:机器人本体,机器人本体包含静态贴合区域、活动关节区域以及刚性支架;在静态贴合区域填充有第一厚度的柔性记忆伸缩性材料与弹性面料构成的第一复合材料,其中弹性面料通过包裹第一厚度的柔性记忆伸缩性材料与机器人本体的静态贴合区域填充连接;在活动关节区域贴附有第二厚度的柔性记忆伸缩性材料与弹性面料构成的第二复合材料,其中第二厚度的柔性记忆伸缩性材料通过内外侧绗缝弹性布料包裹机器人本体的活动关节区域,本申请的机器人基于第一复合材料使得机器人的静态贴合区域具有类似生物肌肉的弹感触性,同时基于第二复合材料使得机器人的活动关节区域在进行独立自由活动时,具有类似肌肉的拉伸力,活动关节区域动作更加顺滑,解决了现有机器人多采用刚性外壳设计,与人互动动作和触感较为僵硬,完成情感交互动作精细度和柔韧性不足,全身肌肉触感模拟不足的技术问题。
技术特征:
1.一种具有仿生肌肉的机器人,其特征在于,包括:
2.根据权利要求1所述的具有仿生肌肉的机器人,其特征在于,所述第二复合材料中弹性面料绗缝有预设图案。
3.根据权利要求2所述的具有仿生肌肉的机器人,其特征在于,所述预设图案包括十字纹理图案、菱形纹理纹理、回型纹理图案、条形纹理图案和/或螺旋纹理图案。
4.根据权利要求1所述的具有仿生肌肉的机器人,其特征在于,所述弹性面料还具有耐磨性。
5.根据权利要求1所述的具有仿生肌肉的机器人,其特征在于,所述第一厚度的柔性记忆伸缩性材料与弹性面料构成的第一复合材料具体为10mm的聚氨酯发泡复合尼龙混纺面料。
6.根据权利要求1所述的具有仿生肌肉的机器人,其特征在于,所述第二厚度的柔性记忆伸缩性材料与弹性面料构成的第二复合材料具体为4mm的聚氨酯发泡复合尼龙混纺面料。
7.根据权利要求1至6任意一项所述的具有仿生肌肉的机器人,其特征在于,所述静态贴合区域包括机器人本体的躯干、头部、四肢以及尾巴。
8.根据权利要求1至6任意一项所述的具有仿生肌肉的机器人,其特征在于,所述活动关节区域包括机器人本体的颈部关节、肩部关节以及四肢关节。
技术总结
本申请公开了一种具有仿生肌肉的机器人,包括:机器人本体,机器人本体包含静态贴合区域、活动关节区域以及刚性支架;在静态贴合区域填充有第一厚度的柔性记忆伸缩性材料与弹性面料构成的第一复合材料,其中弹性面料通过包裹第一厚度的柔性记忆伸缩性材料与机器人本体的静态贴合区域填充连接;在活动关节区域贴附有第二厚度的柔性记忆伸缩性材料与弹性面料构成的第二复合材料,其中第二厚度的柔性记忆伸缩性材料通过内外侧绗缝弹性布料包裹机器人本体的活动关节区域,解决了现有机器人多采用刚性外壳设计,与人互动动作和触感较为僵硬,完成情感交互动作精细度和柔韧性不足,全身肌肉触感模拟不足的技术问题。
技术研发人员:何嘉斌,黄金波,张明哲
受保护的技术使用者:北京萌友智能科技有限公司
技术研发日:
技术公布日:2024/9/5
- 还没有人留言评论。精彩留言会获得点赞!