一种机器人动作控制方法、装置、设备及存储介质与流程
本申请涉及机器人控制,尤其涉及一种机器人动作控制方法、装置、设备及存储介质。
背景技术:
1、目前的机器人大多应用于工业、服务。其侧重机器人的驱动控制、功能实现。而对于家庭宠物类型机器人,侧重实现陪伴、肢体表达,需要丰富、柔和的肢体形态。而目前市场上这一方面还处于空白,少有涉及。
2、目前对于机器人的姿态控制,多集中于空间位姿的准确控制,机器人肢体的驱动实现,而非注重肢体形态的表达,无法满足机器人肢体表达丰富、柔和的需求,且存在难以进行拓展开发,流程化低的技术问题。
技术实现思路
1、本申请提供了一种机器人动作控制方法、装置、设备及存储介质,解决了目前对于机器人的姿态控制,多集中于空间位姿的准确控制,机器人肢体的驱动实现,而非注重肢体形态的表达,无法满足机器人肢体表达丰富、柔和的需求,且存在的难以进行拓展开发,流程化低的技术问题。
2、有鉴于此,本申请第一方面提供了一种机器人动作控制方法,所述方法包括:
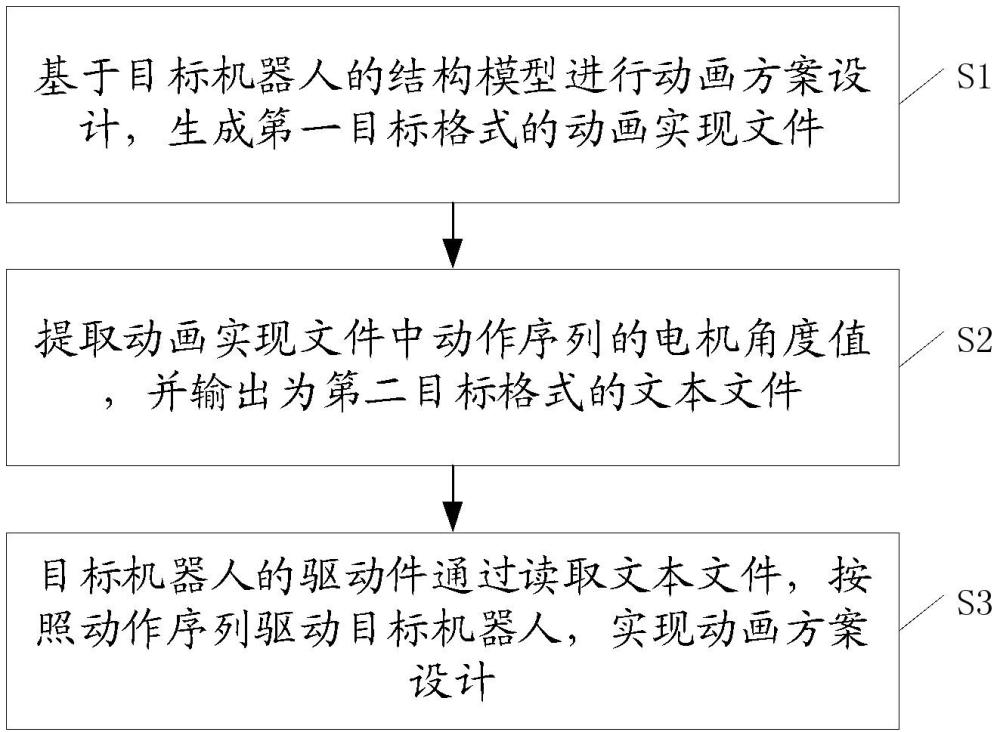
3、s1、基于目标机器人的结构模型进行动画方案设计,生成第一目标格式的动画实现文件;
4、s2、提取所述动画实现文件中动作序列的电机角度值,并输出为第二目标格式的文本文件;
5、s3、所述目标机器人的驱动件通过读取所述文本文件,按照所述动作序列驱动所述目标机器人,实现所述动画方案设计。
6、可选地,所述步骤s2具体包括:
7、按照所述动画方案设计中所述目标机器人的预设关节名称获取第一目标数字串;
8、根据所述第一目标数字串对所述动画实现文件进行匹配,确定第二目标数字串;
9、根据所述第二目标数字串对所述动画实现文件进行匹配,依据匹配的所述第二目标数字串,按照正则表达式匹配动作点位数据,得到动作序列的点位信息;
10、将所述点位信息转换为电机角度值,输出为包含动作序列的点位信息及其对应电机角度值的第二目标格式的文本文件。
11、可选地,所述步骤s3具体包括:
12、所述目标机器人的驱动件按照预设路径读取所述文本文件;
13、按照所述目标机器人的结构模型中电机的动作序列,获取所述文本文件中一帧的对应点位信息;
14、根据所述文本文件将所述点位信息转换为电机角度值,按照所述动作序列以及所述电机角度值驱动所述目标机器人的各关节,直到获取的所述点位信息为空为止。
15、可选地,所述按照所述动作序列以及所述电机角度值驱动所述目标机器人的各关节还包括:
16、按照所述动作序列,通过位置超前发送法将下一帧所述目标机器人关节的电机角度值下发,直到所述动作序列对应极值点。
17、可选地,所述按照所述动作序列以及所述电机角度值驱动所述目标机器人的各关节之前还包括:
18、对所述动作序列进行加减速曲线优化。
19、可选地,所述按照所述动作序列以及所述电机角度值驱动所述目标机器人的各关节之前还包括:
20、对所述动作序列通过中值插值法进行动作频率调节。
21、可选地,所述对所述动作序列进行加减速曲线优化具体包括:
22、对所述动作序列通过t型加减速优化法、s型加减速曲线优化法或贝塞尔曲线插值法进行加减速曲线优化。
23、本申请第二方面提供一种机器人动作控制装置,所述装置包括:
24、生成单元,用于基于目标机器人的结构模型进行动画方案设计,生成第一目标格式的动画实现文件;
25、处理单元,用于提取所述动画实现文件中动作序列的电机角度值,并输出为第二目标格式的文本文件;
26、执行单元,用于所述目标机器人的驱动件,通过读取所述文本文件,按照所述动作序列驱动所述目标机器人,实现所述动画方案设计。
27、本申请第三方面提供一种机器人动作控制设备,所述设备包括处理器以及存储器:
28、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
29、所述处理器用于根据所述程序代码中的指令,执行如上述第一方面所述的机器人动作控制方法的步骤。
30、本申请第四方面提供一种计算机可读存储介质,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行上述第一方面所述的机器人动作控制方法。
31、从以上技术方案可以看出,本申请实施例具有以下优点:
32、本申请中,提供了一种机器人动作控制方法、装置、设备及存储介质,以目标机器人的结构模型的动画方案设计为核心,通过提取动画实现文件中包含动作序列的电机角度值生成文本文件,使得目标机器人的驱动件通过读取文本文件,按照动画方案设计的动作序列及其对应电机角度值,对目标机器人的各关节进行运动控制,同时,可通过更新动画方案设计便捷、快速地更新对机器人的控制方案,解决了目前对于机器人的姿态控制,多集中于空间位姿的准确控制,机器人肢体的驱动实现,而非注重肢体形态的表达,无法满足机器人肢体表达丰富、柔和的需求,且存在的难以进行拓展开发,流程化低的技术问题。
技术特征:
1.一种机器人动作控制方法,其特征在于,包括:
2.根据权利要求1所述的机器人动作控制方法,其特征在于,所述步骤s2具体包括:
3.根据权利要求2所述的机器人动作控制方法,其特征在于,所述步骤s3具体包括:
4.根据权利要求3所述的机器人动作控制方法,其特征在于,所述按照所述动作序列以及所述电机角度值驱动所述目标机器人的各关节还包括:
5.根据权利要求3所述的机器人动作控制方法,其特征在于,所述按照所述动作序列以及所述电机角度值驱动所述目标机器人的各关节之前还包括:
6.根据权利要求3所述的机器人动作控制方法,其特征在于,所述按照所述动作序列以及所述电机角度值驱动所述目标机器人的各关节之前还包括:
7.根据权利要求5所述的机器人动作控制方法,其特征在于,所述对所述动作序列进行加减速曲线优化具体包括:
8.一种机器人动作控制装置,其特征在于,包括:
9.一种机器人动作控制设备,其特征在于,所述设备包括处理器以及存储器:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行权利要求1-7任一项所述的机器人动作控制机器人动作控制方法。
技术总结
本申请公开了一种机器人动作控制方法、装置、设备及存储介质,以目标机器人的结构模型的动画方案设计为核心,通过提取动画实现文件中包含动作序列的电机角度值生成文本文件,使得目标机器人的驱动件通过读取文本文件,按照动画方案设计的动作序列及其对应电机角度值,对目标机器人的各关节进行运动控制,同时,可通过更新动画方案设计便捷、快速地更新对机器人的控制方案,解决了目前对于机器人的姿态控制,多集中于空间位姿的准确控制,机器人肢体的驱动实现,而非注重肢体形态的表达,无法满足机器人肢体表达丰富、柔和的需求,且存在的难以进行拓展开发,流程化低的技术问题。
技术研发人员:杨梦琳,张明哲,何嘉斌
受保护的技术使用者:北京萌友智能科技有限公司
技术研发日:
技术公布日:2024/8/15
- 还没有人留言评论。精彩留言会获得点赞!