基于共振耦合增强的振动黏附模块
本发明属于黏附,特别是一种基于共振耦合增强的振动黏附模块。
背景技术:
1、黏附技术是爬壁机器人、机械抓手等的核心技术,其黏附力、可控性、可靠性决定了爬壁机器人、机械抓手在工作中的关键性能。振动黏附技术由于其小体积、高黏附比的特点受到科研界的关注,有望成为下一代基本黏附方法。但是目前的传统振动黏附存在黏附性能低于理论值的问题。
2、在背景技术部分中公开的上述信息仅仅用于增强对本发明背景的理解,因此可能包含不构成本领域普通技术人员公知的现有技术的信息。
技术实现思路
1、针对现有技术中存在的问题,本发明提出一种基于共振耦合增强的振动黏附模块,通过弹性系数优化、振动质量微调使得整个黏附模块的共振情况达到最优,充分发挥振动黏附的性能,极大提高了所述发明的可靠性和实用性。
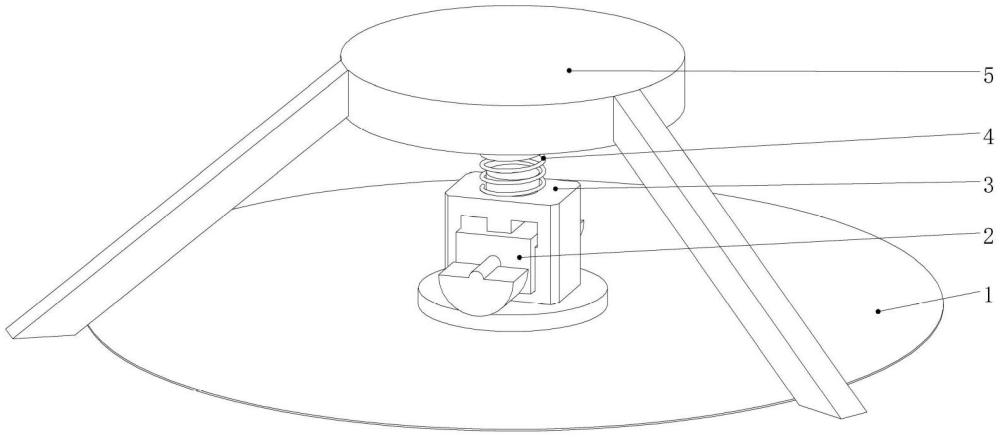
2、本发明的目的是通过以下技术方案予以实现,一种基于共振耦合增强的振动黏附模块包括,
3、可变质量支架,
4、弹性体,其一端连接所述可变质量支架,
5、电机固定件,其连接所述弹性体的另一端,
6、振动电机,其安装于所述电机固定件中提供可控的振动,
7、振动膜,其连接所述电机固定件以在振动黏附模块中发生共振,所述振动膜与黏附对象之间形成负压区域以提供黏附力。
8、所述的基于共振耦合增强的振动黏附模块中,所述振动膜底面设有增强法向粘附力的微结构。
9、所述的基于共振耦合增强的振动黏附模块中,所述微结构包括纳米级的凹凸微结构或弧形微结构。
10、所述的基于共振耦合增强的振动黏附模块中,当振动源关闭不再提供振动,振动膜和黏附对象脱开,内部的负压区域与外界连通从而脱附。
11、所述的基于共振耦合增强的振动黏附模块中,通过调整弹性体的弹性系数和可变质量支架的质量,使振动膜与其他部分发生可控共振。
12、所述的基于共振耦合增强的振动黏附模块中,所述振动膜的振动幅值表达式:
13、其中,
14、m1表示振动膜的质量,m2表示可变质量支架的质量;c2表示可变质量支架和地面之间的接触阻尼;k1表示弹性体的弹性系数,k2表示可变质量支架和地面之间的接触弹性系数,a0表示振动电机的平均振动力,ω0表示振动膜的自然频率,ωa为可变质量支架自然频率。
15、所述的基于共振耦合增强的振动黏附模块中,所述振动电机和电机固定件过盈配合。
16、所述的基于共振耦合增强的振动黏附模块中,振动膜和电机固定件、电机固定件和弹性体、弹性体和可变质量支架均通过硅胶进行粘接。
17、所述的基于共振耦合增强的振动黏附模块中,所述电机固定件具有水平底面和水平顶面。
18、所述的基于共振耦合增强的振动黏附模块中,振动黏附模块为中心对称结构。
19、和现有技术相比,本发明具有以下优点:本发明所述的基于共振耦合增强的振动黏附模块对电机振动产生的共振效应进行分析、黏附效果强,通过弹性系数优化、振动质量微调使得整个黏附模块的共振情况达到最优,充分发挥振动黏附的性能,极大提高了振动黏附模块可靠性和实用性。
技术特征:
1.一种基于共振耦合增强的振动黏附模块,其特征在于,其包括,
2.根据权利要求1所述的基于共振耦合增强的振动黏附模块,其特征在于,优选的,所述振动膜底面设有增强法向粘附力的微结构。
3.根据权利要求2所述的基于共振耦合增强的振动黏附模块,其特征在于,所述微结构包括纳米级的凹凸微结构或弧形微结构。
4.根据权利要求1所述的基于共振耦合增强的振动黏附模块,其特征在于,所述振动膜的振动幅值表达式:
5.根据权利要求1所述的基于共振耦合增强的振动黏附模块,其特征在于,所述振动电机和电机固定件过盈配合。
6.根据权利要求1所述的基于共振耦合增强的振动黏附模块,其特征在于,振动膜和电机固定件、电机固定件和弹性体、弹性体和可变质量支架均通过硅胶进行粘接。
7.根据权利要求1所述的基于共振耦合增强的振动黏附模块,其特征在于,所述电机固定件具有水平底面和水平顶面。
8.根据权利要求1所述的基于共振耦合增强的振动黏附模块,其特征在于,振动黏附模块为中心对称结构。
技术总结
公开了一种基于共振耦合增强的振动黏附模块,振动黏附模块中,弹性体一端连接所述可变质量支架,弹性体包括弹簧、柔性聚合物材料、橡胶、折纸弹性机构,所述可变质量支架代表和弹性体连接且和黏附对象相接触的零件,电机固定件连接所述弹性体的另一端,振动电机安装于所述电机固定件中提供可控的振动,振动膜连接所述电机固定件以在振动黏附模块中发生共振,所述振动膜与黏附对象之间形成负压区域以提供黏附力。
技术研发人员:苑康龙,陈信先,彭军
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!