一种基于嵌入式的机械臂智能分拣与体感交互系统的制作方法
本发明属于模块化机械臂的控制,具体为一种基于嵌入式的机械臂智能分拣与体感交互系统。
背景技术:
1、我国工业机器人的发展历程相较于国际先进水平而言起步较晚,受国情因素限制,其技术进展与市场应用均呈现出相对缓慢的趋势。尽管目前市场上已涌现出众多工业机械臂产品,但在关键性能指标如功能多样性与成本控制上,仍面临技术瓶颈和应用限制,整体的研究与应用水平亟待提升。
2、在当前的机械臂市场上,存在一些知名制造商如幻尔公司和lerm公司等,它们推出的产品主要聚焦于体感交互功能,或是单一的图像识别处理功能。然而,值得注意的是,这些机械臂产品中鲜有将体感交互功能和扫码分拣功能结合在一起的案例。大部分机械臂仍然停留在单一功能的实现上,未能充分利用体感交互的直观性和扫码分拣的高效性,传统的控制机械臂张开闭合,使用的是弯曲度传感器或者滑动变阻器。且存在以下问题:机械臂的体感系统繁琐复杂,成本高,机械臂对二维码内容读取和做出相应分拣动作的反应速度低,无法完成小尺寸高精度的分拣操作等缺点。
3、针对这一市场现状,结合物流分拣、快递分拣、药房分拣等行业的实际需求,开发一款集体感交互和扫码分拣功能于一体的机械臂将具有巨大的市场潜力和应用价值。
技术实现思路
1、本发明的目的在于提供一种基于嵌入式的机械臂智能分拣与体感交互系统,以解决上述背景技术中提出的问题。
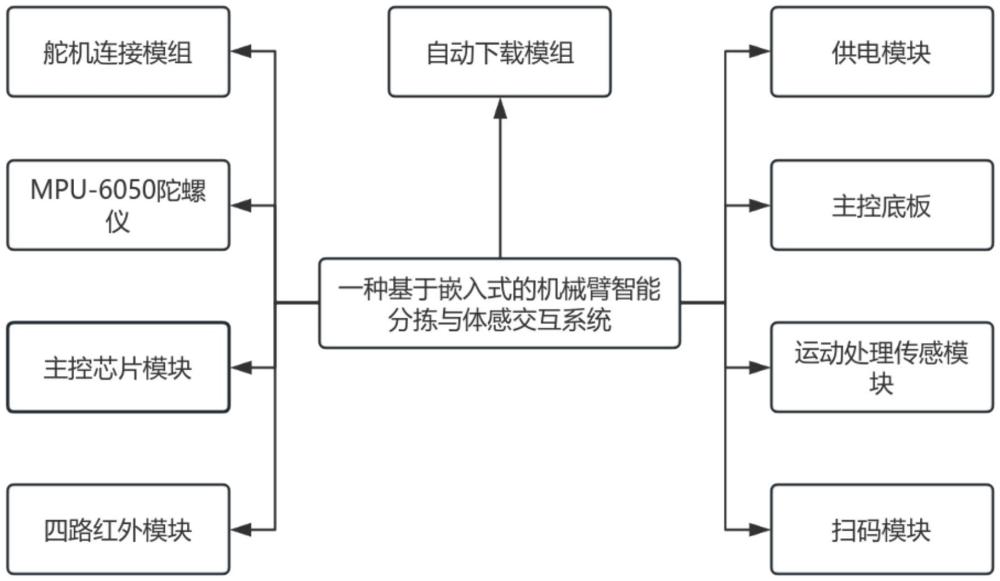
2、为了实现上述目的,本发明提供如下技术方案:一种基于嵌入式的机械臂智能分拣与体感交互系统,该机械臂系统的组成部位为:主控芯片模块,四路红外模块,mpu-6050陀螺仪,扫码模块,运动处理传感模块,主控底板,供电模块,自动下载模组,舵机连接模组。
3、优选地,所述主控芯片模块为stm32f103rbt6最小系统板;主要由电源,时钟,调试,复位,以及控制芯片五大部分组成。
4、优选地,所述四路红外模块由发射器和探测器组成;当红外光照射到光电二极管上时,电阻和输出电压将随接收到的红外光的大小而成比例变化;用于感知人手张开闭合状态,从而引导机械臂做出相应的动作。
5、优选地,所述运动处理传感模块指代6轴运动处理传感器,由mpu-6050运动处理传感器构成;所述mpu-6050运动处理传感器集成了3轴mems陀螺仪,3轴mems加速度计,以及一个可扩展的数字运动处理器dmp。
6、优选地,所述红外模块是当红外光照射到光电二极管上时,电阻和输出电压将随接收到的红外光的大小而成比例变化,控制机械臂手掌的张开闭合。
7、优选地,所述扫码模块使用md280扫码模组,md280是一款嵌入式二维影像模组,采用先进的cmos影像识别技术,智能图像识别系统,配备30万像素高清摄像头,用于扫码功能的实现。
8、优选地,所述舵机连接模组能够有效地传递力量和实现相应的角度控制。
9、优选地,所述自动下载模组能够实现与其他设备或系统的数据交换和协作,减小误差。
10、优选地,所述供电模块包括电压稳定器、电流限制器;用于对输入电源进行管理和分配,确保各个部件和功能模块得到稳定的电源供应。
11、本发明的有益效果如下:
12、本发明通过使用先进的扫码设备和体感技术,将分拣过程中的物品信息进行数字化,并通过计算机处理实现自动识别和分拣,从而大大提高了分拣的效率和准确性,节省了分拣的成本,提高了企业的竞争力,也是智能分拣实现信息化、自动化、智能化的必要手段。
13、该系统具有体积小(便携)、成本低(经济)、操作简单等特点,对物品条码信息快速分辨并做出相应动作;实现物品自动化分拣;可方便实现对某个区域的快速分类分拣和体感操控,提高分拣过程的效率和准确性,从而降低人工操作的成本和错误率。这一设计有助于提高物品分拣的可靠性、速度和质量,提高用户和消费者的满意度和信任度。
技术特征:
1.一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:该机械臂系统的组成部位为:主控芯片模块,四路红外模块,mpu-6050陀螺仪,扫码模块,运动处理传感模块,主控底板,供电模块,自动下载模组,舵机连接模组。
2.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述主控芯片模块为stm32f103rbt6最小系统板;主要由电源,时钟,调试,复位,以及控制芯片五大部分组成。
3.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述四路红外模块由发射器和探测器组成;当红外光照射到光电二极管上时,电阻和输出电压将随接收到的红外光的大小而成比例变化;用于感知人手张开闭合状态,从而引导机械臂做出相应的动作。
4.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述运动处理传感模块指代6轴运动处理传感器,由mpu-6050运动处理传感器构成;所述mpu-6050运动处理传感器集成了3轴mems陀螺仪,3轴mems加速度计,以及一个可扩展的数字运动处理器dmp。
5.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述红外模块是当红外光照射到光电二极管上时,电阻和输出电压将随接收到的红外光的大小而成比例变化,控制机械臂手掌的张开闭合。
6.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述扫码模块使用md280扫码模组,md280是一款嵌入式二维影像模组,采用先进的cmos影像识别技术,智能图像识别系统,配备30万像素高清摄像头,用于扫码功能的实现。
7.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述舵机连接模组能够有效地传递力量和实现相应的角度控制。
8.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述自动下载模组能够实现与其他设备或系统的数据交换和协作,减小误差。
9.根据权利要求1所述的一种基于嵌入式的机械臂智能分拣与体感交互系统,其特征在于:所述供电模块包括电压稳定器、电流限制器;用于对输入电源进行管理和分配,确保各个部件和功能模块得到稳定的电源供应。
技术总结
本发明属于模块化机械臂的控制技术领域,且公开了一种基于嵌入式的机械臂智能分拣与体感交互系统,该机械臂系统的组成部位为:主控芯片模块,四路红外模块,MPU‑6050陀螺仪,扫码模块,运动处理传感模块,主控底板,供电模块,自动下载模组,舵机连接模组。本发明基于物品自动化分拣的实际需求,通过使用先进的扫码设备和体感技术,将分拣过程中的物品信息进行数字化,并通过计算机处理实现自动识别和分拣,从而大大提高了分拣的效率和准确性,节省了分拣的成本,提高了企业的竞争力,也是智能分拣实现信息化、自动化、智能化的必要手段。
技术研发人员:侯博文,王庆春
受保护的技术使用者:侯博文
技术研发日:
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!