一种机器人用关节电机模组的装配方法与流程
本发明属于关节电机结构,尤其涉及一种机器人用关节电机模组的装配方法。
背景技术:
1、关节电机是一种由电机和减速器组成的机电一体化设备。其工作原理是基于电机和减速器的协同作用,实现高精度运动。关节电机主要由电机主体、减速器、轴承、控制器组件、外壳等部分组成。现有的关节电机模组中电机转轴与壳体之间的轴承需要过盈安装,操作不当易造成零部件损伤,且现有的关节电机由于包含的部件较多,需要分别将电机以及减速器单独组装完成后再连接在一起,整个过程安装步骤繁琐,影响组装效率;且现有的关节电机多数还没有对于输出端(减速器输出端)的扭矩信息检测功能,无法提高控制进度,小部分关节电机即使配置了扭矩传感器,也会使得关节电机体积增加,结构更加复杂,同时装配也更加繁琐。
技术实现思路
1、为了解决上述技术问题,本发明的目的在于提供一种机器人用关节电机模组的装配方法,该方法操作方便,装配质量好且安装效率高。
2、为了实现上述发明目的,本发明采用以下技术方案:
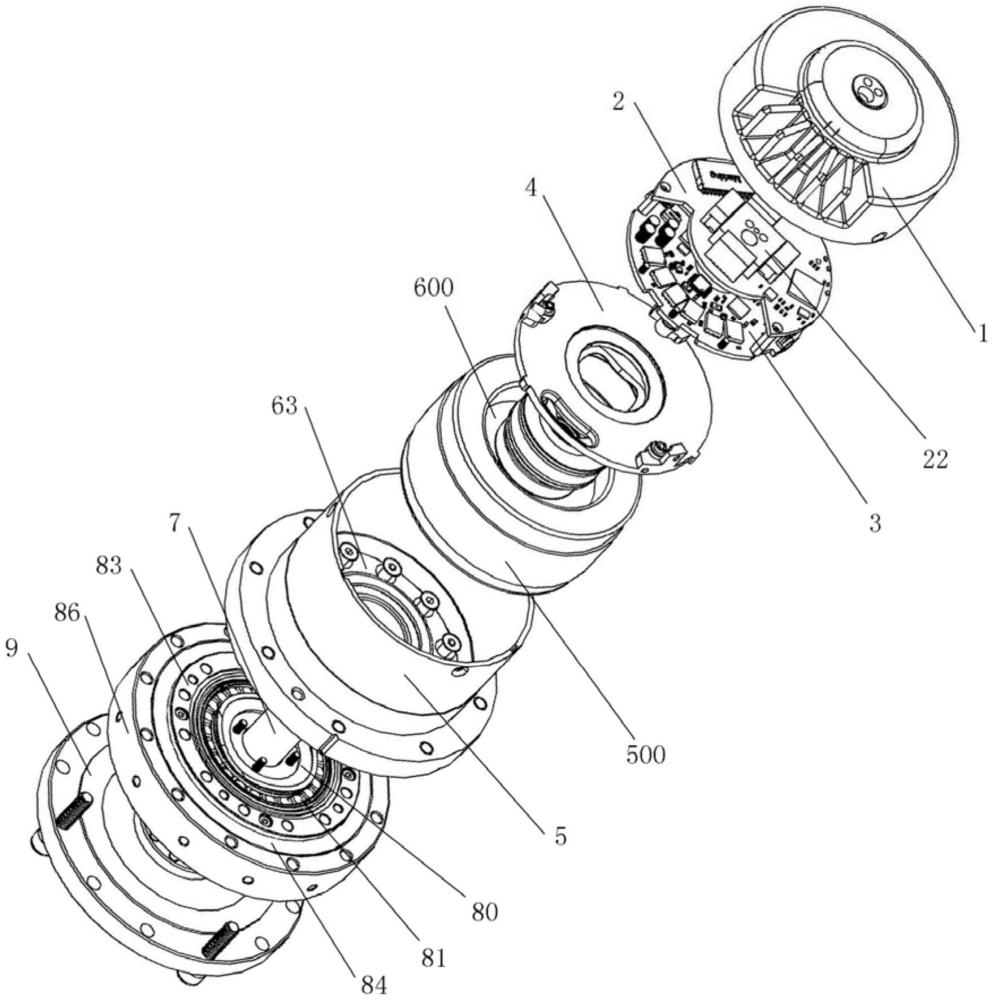
3、一种机器人用关节电机模组的装配方法,该关节电机模组包括电机、谐波减速器、扭矩传感器、t形轴和控制器总成,所述电机包括端板、壳体、定子铁芯、转轴以及转子铁芯,所述谐波减速器包括波发生器、柔轮和钢轮,所述控制器总成包括控制器盖、第一电路板、第二电路板以及支撑固定杆,装配步骤如下:
4、s1、用螺栓将谐波减速器的柔轮与扭矩传感器的内圈固定,并且通过交叉滚子轴承将扭矩传感器的外圈与谐波减速器的钢轮转动连接,同时使得柔轮设置在钢轮内;
5、s2、将轴承b压装在转轴的一端,且将轴承挡板套设在轴承b上,然后将转子铁芯压装在转轴上,并且将轴承a压装在转轴的另一端;同时,在转轴靠近轴承a的一端内侧压装轴瓦,形成转子组件;
6、s3、将上述转子组件装入壳体,并将轴承压板与壳体一端的端面通过螺栓紧固,且螺栓贯穿壳体的端面;
7、s4、将谐波减速器的波发生器与转轴的一端固定,然后将柔轮套设在波发生器外,同时,用贯穿壳体端面的螺栓将谐波减速器的钢轮以及交叉滚子轴承的轴承内圈固定;
8、s5、将定子铁芯压装入壳体内壁,在轴承a的一侧放置波簧,将端板扣设在轴承a上并对波簧限位,并用螺栓将端板与壳体固定;
9、s6、在转轴的一端端面上放置密封圈b,并且在转轴的一端套设固定磁环座b,磁环座b将密封圈b压紧;同时,在磁环座b固定磁环b;
10、s7、用支撑固定杆将第二电路板固定在端板上,并使得第二电路板与磁环b留有间隙;
11、s8、将t形轴贯穿扭矩传感器、谐波减速器以及转轴,且将t形轴的一端与扭矩传感器固定,并在t形轴穿出第二电路板的一端套设固定磁环座a,并在磁环座a靠近第二电路板的一侧固定磁环a;
12、s9、将第一电路板与第二电路板插接,且将第一电路板固定在支撑固定杆的一端;
13、s10、将信号线的进线、电源线进线以及扭矩传感器的导线贯穿t形轴后,插接至相应的第一电路板或第二电路板上;
14、s11、将信号线的出线、电源线出现从控制器盖穿出,并将控制器盖与壳体固定,将第一电路板和第二电路板遮蔽。
15、作为优选方案:所述步骤s1中,交叉滚子轴承包括相互套接且转动设置的轴承内圈和轴承外圈,所述钢轮与轴承内圈固定,且钢轮与轴承外圈之间还设有密封环,所述扭矩传感器包括弹性基体、信号调理模块和应变片,所述弹性基体的外圈与轴承外圈固定,所述弹性基体的内圈与柔轮固定。
16、作为优选方案:所述步骤s5中,在安装定子铁芯之前,在轴承扣板上加导热凝胶,安装完定子铁芯后,在定子铁芯与端板之间加导热凝胶,同时该处的导热凝胶避让开定子三相线。
17、作为优选方案:所述步骤s8中,所述t形轴包括一体成型的中间管和连接盘,连接盘与中间管的连接处还套设有密封圈a,t形轴安装后,密封圈a与扭矩传感器相抵,所述t形轴上还涂抹有黄油。
18、作为优选方案:所述步骤s10中,第一电路板上还固定有线束固定块b,所述信号线的进线、电源线进线以及扭矩传感器的导线贯穿线束固定块b后,与相应的第一电路板或者第二电路板连接。
19、作为优选方案:所述步骤s11中,控制器盖上固定有线束固定块a,所述信号线的出线、电源线出线从线束固定块a穿出。
20、作为优选方案:所述步骤s11中,控制器盖与壳体的接触面还涂抹有密封胶。
21、作为优选方案:所述步骤s11中,所述第一电路板上设有扇面状缺口,所述控制器盖的顶面至少部分下凹形成散热接触面,在第二电路板上的部分元器件涂抹导热硅胶,并使得散热接触面贯穿扇面状缺口后与导热硅胶接触。
22、作为优选方案:所述端板上沿外沿间隔设置多个台阶状的连接块,所述连接块侧壁的上部开设有第一连接孔,所述连接块侧壁的下部开设有第二连接孔,且第一连接孔和第二连接孔分别位于两个台阶的外侧壁,所述控制器盖扣设在连接块外,且通过贯穿控制器盖的连接件与第一连接孔固定,所述端板嵌设在壳体内,且通过贯穿壳体的连接件与第二连接孔固定。
23、作为优选方案:所述端板的外圆周还间隔设置多个定位凸块,所述定位凸块与连接块错位设置,所述壳体的上边沿内侧还设有多个与定位凸块相配合的限位缺口。
24、作为优选方案:所述端板外沿间隔设有多个用于支撑第二电路板的支撑柱,所述支撑柱包括上下两个外径不同的底部支撑柱和限位凸柱,底部支撑柱与第二电路板下端面相抵,限位凸柱卡入第二电路板的定位缺口内,且限位凸柱中还设有用于将第二电路板压紧的螺栓。
25、本发明所采用的方法,将轴承通过轴承压板进行限位安装,整体安装方便,不易损伤零件,且用于固定轴承压板和壳体的螺栓贯穿了壳体,可直接用于固定谐波减速器,进一步简化了安装步骤;谐波减速器通过轴承连接有扭矩传感器,同时安装有贯穿扭矩传感器、谐波减速器以及转轴的t形轴,可以将信号线,电源线以及扭矩传感器的导线通过t形轴内部连接入控制器总成,接线操作方便,且整体更加整洁美观,线束不易缠绕;本发明的方法还采用了双电路板方案,两块电路板之间留有间隙,能够保证散热空间;另外,两个电路板采用对插设计,连接方便,两个电路板直径较小,结构紧凑,利于产品集成小型化设计;另外,本发明的控制板固定在端板上靠近电机侧,较短的电机线的长度,减少损耗,提高整机效率。
技术特征:
1.一种机器人用关节电机模组的装配方法,该关节电机模组包括电机、谐波减速器(8)、扭矩传感器(9)、t形轴和控制器总成,所述电机包括端板(4)、壳体(5)、定子铁芯(500)、转轴(6)以及转子铁芯(600),所述谐波减速器包括波发生器、柔轮(82)和钢轮(83),所述控制器总成包括控制器盖(1)、第一电路板(2)、第二电路板(3)以及支撑固定杆(31),其特征在于,装配步骤如下:
2.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述步骤s1中,交叉滚子轴承包括相互套接且转动设置的轴承内圈(85)和轴承外圈(86),所述钢轮(83)与轴承内圈(85)固定,且钢轮(83)与轴承外圈(86)之间还设有密封环(84),所述扭矩传感器(9)包括弹性基体、信号调理模块(95)和应变片(96),所述弹性基体的外圈与轴承外圈(86)固定,所述弹性基体的内圈与柔轮(82)固定。
3.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述步骤s5中,在安装定子铁芯(500)之前,在轴承扣板(63)上加导热凝胶,安装完定子铁芯(500)后,在定子铁芯(500)与端板(4)之间加导热凝胶,同时该处的导热凝胶避让开定子三相线。
4.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述步骤s8中,所述t形轴包括一体成型的中间管(7)和连接盘(73),连接盘(73)与中间管(7)的连接处还套设有密封圈a(732),t形轴安装后,密封圈a(732)与扭矩传感器(9)相抵,所述t形轴上还涂抹有黄油。
5.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述步骤s10中,第一电路板(2)上还固定有线束固定块b(22),所述信号线的进线、电源线进线以及扭矩传感器的导线贯穿线束固定块b(22)后,与相应的第一电路板(2)或者第二电路板(3)连接。
6.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述步骤s11中,控制器盖(11)上固定有线束固定块a(11),所述信号线的出线、电源线出线从线束固定块a(11)穿出。
7.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述步骤s11中,控制器盖(1)与壳体(5)的接触面还涂抹有密封胶。
8.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述步骤s11中,所述第一电路板(2)上设有扇面状缺口(20),所述控制器盖(1)的顶面至少部分下凹形成散热接触面(14),在第二电路板(3)上的部分元器件涂抹导热硅胶,并使得散热接触面(14)贯穿扇面状缺口(20)后与导热硅胶接触。
9.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述端板(4)上沿外沿间隔设置多个台阶状的连接块(42),所述连接块(42)侧壁的上部开设有第一连接孔,所述连接块(42)侧壁的下部开设有第二连接孔,且第一连接孔和第二连接孔分别位于两个台阶的外侧壁,所述控制器盖(1)扣设在连接块(42)外,且通过贯穿控制器盖(1)的连接件与第一连接孔固定,所述端板(4)嵌设在壳体(5)内,且通过贯穿壳体(5)的连接件与第二连接孔固定。
10.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述端板(4)的外圆周还间隔设置多个定位凸块(43),所述定位凸块(43)与连接块(42)错位设置,所述壳体(5)的上边沿内侧还设有多个与定位凸块(43)相配合的限位缺口(51)。
11.根据权利要求1所述的一种机器人用关节电机模组的装配方法,其特征在于:所述端板(4)外沿间隔设有多个用于支撑第二电路板(3)的支撑柱(41),所述支撑柱(41)包括上下两个外径不同的底部支撑柱(411)和限位凸柱(412),底部支撑柱(411)与第二电路板(3)下端面相抵,限位凸柱(412)卡入第二电路板(3)的定位缺口(32)内,且限位凸柱(412)中还设有用于将第二电路板(3)压紧的螺栓。
技术总结
本发明涉及一种机器人用关节电机模组的装配方法,该方法将轴承通过轴承压板进行限位安装,整体安装方便,不易损伤零件,且螺栓可直接用于固定谐波减速器,进一步简化了安装步骤;谐波减速器通过轴承连接有扭矩传感器,同时安装有贯穿扭矩传感器、谐波减速器以及转轴的T形轴,可以将信号线,电源线以及扭矩传感器的导线通过T形轴内部连接入控制器总成,接线操作方便;本发明的方法还采用了双电路板方案,两块电路板之间留有间隙,能够保证散热空间;另外,两个电路板采用对插设计,连接方便,结构紧凑;另外,本发明的控制板固定在端板上靠近电机侧,较短的电机线的长度,减少损耗,提高整机效率。
技术研发人员:牛铭奎,高志川,金启前,张鸿
受保护的技术使用者:浙江方德机器人关节科技有限公司
技术研发日:
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!