一种基于零部件螺栓相对位置关系的快速对准方法
本发明涉及机器人,尤其涉及一种基于零部件螺栓相对位置关系的快速对准方法。
背景技术:
1、接触网是铁路系统中的重要组成部分,具有不可替代的重要性。它为电气化铁路系统提供稳定、安全、高效且环保的电力供应,保障了列车的正常运行和乘客的出行安全。接触网由一系列金属构件组成,如接触线、接触网杆、绝缘子等。这些构件需要通过螺栓进行连接,以确保整个接触网系统的结构稳定和完整。经过长时间的使用和自然环境因素造成的磨损等原因,螺栓具有松动、脱落的风险。因此对接触网的螺栓进行维护检修显得尤其重要。
2、传统的接触网螺栓检修主要采用人工维护的方式。接触网螺栓分布范围广,数量众多,维护过程需要人员进行逐个检查和紧固。这种人工维护方式需要耗费大量的人力和时间,劳动强度较大、维护周期长、效率低下。若是有些接触网位于高架桥梁、隧道等不可及区域,无法通过常规的人工维护方式进行检修。这些区域的螺栓检修可能需要采用特殊的工具和设备,增加了维护的复杂性和成本。所以出现了采用机械臂代替人工进行螺栓维护的方案,机械臂对准螺栓则是依赖其搭载的视觉传感器所获取的视觉信息,现如今普遍是采用视觉伺服技术来进行螺栓对准。机械臂采用视觉伺服对准一颗螺栓至少需要10s的时间,但是同一零部件所需要检修的螺栓通常有3到5个,因此若全部螺栓都采用视觉伺服进行对准将大大增加工作时间,不利于实际应用。
技术实现思路
1、为了解决机械臂使用视觉伺服对准螺栓拧紧过程中存在的检修效率低,工作时间长的问题,本发明提出一种基于零部件螺栓相对位置关系的快速对准方法,解决上述问题。
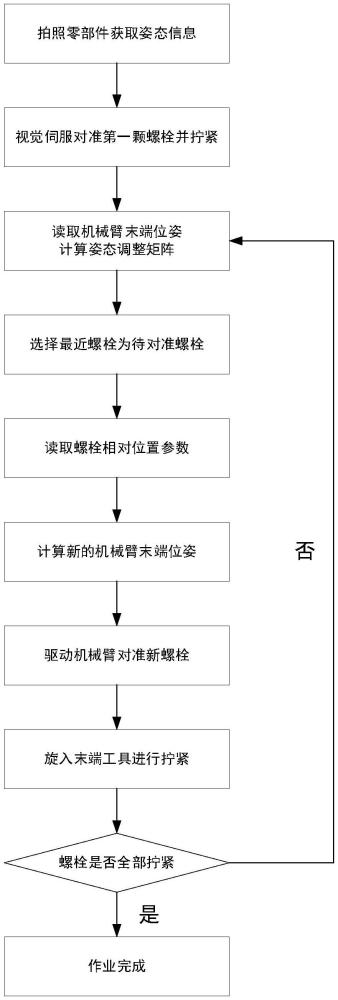
2、本申请公开了一种基于零部件螺栓相对位置关系的快速对准方法,包括以下步骤:
3、s1、相机获取一帧零部件的完整图像,并计算零部件的姿态信息;
4、s2、采用视觉伺服完成机械臂对第一颗螺栓的对准,并进行第一次螺栓拧紧作业;
5、s3、读取并记录上一次螺栓拧紧作业完成时的机械臂末端位姿信息,并结合s1的零部件姿态信息,计算出机械臂的末端姿态调整矩阵,方便后续螺栓对准;
6、s4、选择距离s3中已拧紧螺栓最近的螺栓作为待对准螺栓,并读取二者之间相对位置参数;
7、s5、结合s3中的机械臂末端位姿信息、机械臂末端姿态调整矩阵和s4中已知的两螺栓相对位置参数,计算出机械臂末端对准下一颗螺栓时的期望机械臂末端位姿信息;
8、s6、将s5中得到的期望机械臂末端位姿信息通过movel指令,输出给机械臂从而控制机械臂末端运动进行螺栓对准;
9、s7、当s6的对准完成后,控制机械臂末端安装的拧紧工具旋转进入螺栓并进行拧紧操作;
10、s8、重复s3至s7,直到完成该零部件所有螺栓的对准拧紧作业为止。
11、优选的,所述s1中姿态信息的计算公式为:
12、
13、其中,为机械臂基座坐标系到零部件坐标系的转换矩阵,为机械臂基座坐标系到机械臂末端坐标系的转换矩阵,为机械臂末端坐标系到相机坐标系的转换矩阵,为相机坐标系到零部件坐标系的转换矩阵。
14、优选的,所述s3包括以下步骤:
15、当第一次螺栓拧紧作业结束后,通过rtde读取并记录此时机械臂末端位姿,其齐次矩阵形式记为此时机械臂末端坐标系的姿态和零部件坐标系的姿态存在偏差,需要进行调整对齐,调整对齐后机械臂末端和第一颗拧紧的螺栓a仍然重合,存在下式:
16、
17、其中,为机械臂基座到第一颗拧紧的螺栓a的转换矩阵,为调整对齐后机械臂基座到末端的转换矩阵,为机械臂末端姿态调整矩阵,由和t=(0,0,0)构成,其中为的旋转矩阵部分;
18、因为机械臂基座和零部件均未发生改变,所以可以由下式获得:
19、
20、其中,表示当前机械臂末端坐标系到零部件坐标系的转换矩阵。
21、优选的,所述s4中已拧紧与其最近的螺栓的相对位置参数为:
22、记距离第一颗拧紧的螺栓a最近的螺栓为螺栓b,则有:
23、
24、其中,-a表示螺栓b相对于螺栓a的y轴相对偏移量。
25、优选的,所述s5包括以下步骤:
26、计算对准螺栓b的机械臂末端位姿:
27、
28、当机械臂末端对准螺栓b时有:
29、
30、则可以得到:
31、
32、其中,为机械臂的期望末端位姿。
33、优选的,所述s6包括以下步骤:
34、s61、当机械臂视觉伺服对准拧紧螺栓a后,先将通过rtde的movel指令输出给机械臂,使机械臂末端倒退0.05m到安全区域,防止后续操作发生碰撞;
35、s62、将s5得到的期望末端位姿通过rtde的movel指令输出给机械臂,控制机械臂运动使机械臂末端安装的拧紧工具对准螺栓b。
36、本发明的有益效果:
37、(1)本发明在对某零部件完成第一次伺服对准螺栓后,该零部件剩余螺栓对准将舍弃视觉信息,通过预先获得的和已对准螺栓的相对位置关系,进行快速对准,对准一颗螺栓的时间最多5s,能够降低对视觉检测装置的需求。
38、(2)本发明对准一个零部件上所有螺栓所需要的总时间要远小于通过视觉伺服对准全部螺栓需要的总时间,大大缩短了采用机械臂进行螺栓维护的时间,提高了检修效率及螺栓对准的精度。
技术特征:
1.一种基于零部件螺栓相对位置关系的快速对准方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于零部件螺栓相对位置关系的快速对准方法,其特征在于,所述s1中姿态信息的计算公式为:
3.根据权利要求2所述的基于零部件螺栓相对位置关系的快速对准方法,其特征在于,所述s3包括以下步骤:
4.根据权利要求3所述的基于零部件相对位置关系的快速对准方法,其特征在于,所述s4中已拧紧与其最近的螺栓的相对位置参数为:
5.根据权利要求4所述的基于零部件相对位置关系的快速对准方法,其特征在于,所述s5包括以下步骤:
6.根据权利要求5所述的基于零部件相对位置关系的快速对准方法,其特征在于,所述s6包括以下步骤:
技术总结
本发明公开了一种基于零部件螺栓相对位置关系的快速对准方法,包括以下步骤:S1、计算零部件的姿态信息;S2、采用视觉伺服进行第一次螺栓拧紧作业;S3、计算机械臂的末端姿态调整矩阵;S4、选择距离已拧紧螺栓最近的螺栓作为待对准螺栓,并读取二者之间相对位置参数;S5、计算机械臂末端对准下一颗螺栓时的机械臂末端位姿信息;S6、控制机械臂末端运动进行螺栓对准;S7、控制机械臂末端安装的拧紧工具旋转进入螺栓并进行拧紧操作;S8、重复S3至S7,直到完成该零部件所有螺栓的对准拧紧作业。本发明能够降低对视觉检测装置的需求,提高检修效率及螺栓对准的精度。
技术研发人员:王宇涛,马磊,孙永奎,林剑飞,郝浩楠,邓泽宇,鲁文儒,王冬瑞,马文杰
受保护的技术使用者:西南交通大学
技术研发日:
技术公布日:2024/9/19
- 还没有人留言评论。精彩留言会获得点赞!