多机器人的协作焊接方法、焊接装置、设备及介质
本申请实施例涉及图像处理领域,尤其涉及多机器人的协作焊接方法、焊接装置、设备及介质。
背景技术:
1、目前,焊接机器人在焊接车间得到广泛应用。多机器人轨迹规划是完成焊接任务的基础,焊接过程中需要考虑工件姿态、焊枪姿态、焊接位置、机器人平稳性等各种因素。多目标优化,是考虑实际的需要,同时考虑两种或两种以上的性能最优性,得到综合优化的机器人运行轨迹。常常用权重系数法处理组合目标优化问题,该种方法一般对各优化目标函数添加相应的权重系数,将多目标问题转化成单目标问题进行优化处理,而权重系数大小的分配,体现出个别目标在综合优化目标中的程度,与此同时也要考虑到各优化目标函数的数量级或量纲不同的问题,致使权重系数很难合理的给予各优化目标函数,同时求解出来的解有可能不是全局最优解,陷入局部最优解。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本申请的目的在于至少一定程度上解决相关技术中存在的技术问题之一,本申请实施例提供了多机器人的协作焊接方法、焊接装置、设备及介质,能够保证全局搜索能力与收敛速度,避免陷入局部最优的情况。
3、本申请的第一方面的实施例,一种多机器人的协作焊接方法,包括:
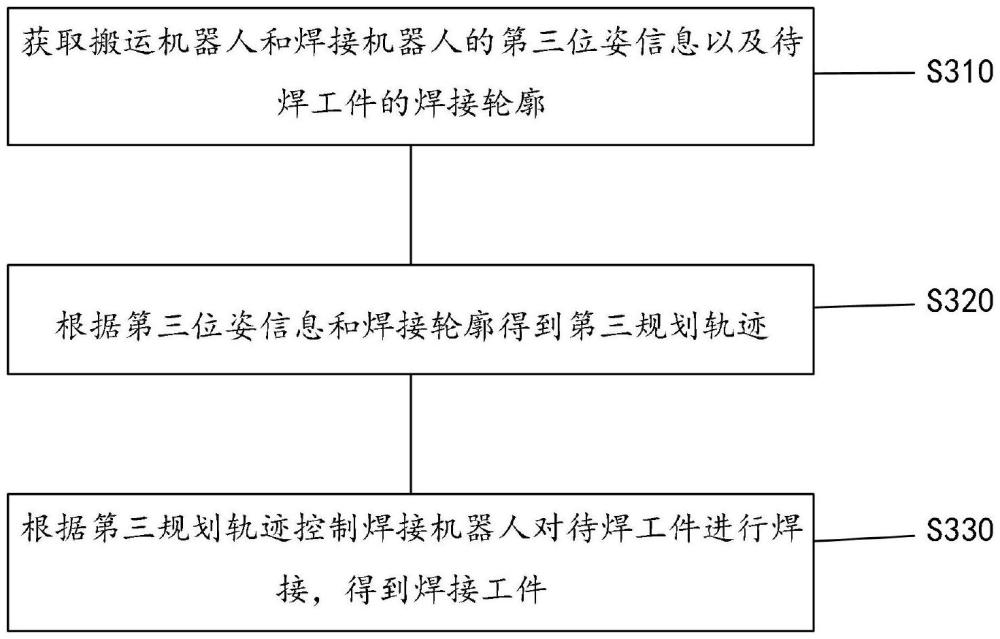
4、获取搬运机器人和焊接机器人的第三位姿信息以及待焊工件的焊接轮廓;
5、根据所述第三位姿信息和所述焊接轮廓得到第三规划轨迹;
6、根据所述第三规划轨迹控制所述焊接机器人对所述待焊工件进行焊接,得到焊接工件;
7、其中,在焊接过程中,获取待焊工件的当前焊缝形貌,根据所述当前焊缝形貌调整所述第三规划轨迹。
8、根据本申请的第一方面的某些实施例,所述根据所述第三位姿信息和所述焊接轮廓得到第三规划轨迹,包括:
9、根据所述第三位姿信息和所述焊接轮廓确定搬运机器人和焊接机器人的全局关节变化量和平均脉冲以及焊接机器人的总路径长度和能耗;
10、根据搬运机器人和焊接机器人的全局关节变化量和平均脉冲以及焊接机器人的总路径长度和能耗,得到第三规划轨迹的最优初始焊接位置;
11、根据所述最优初始焊接位置规划得到第三规划轨迹。
12、根据本申请的第一方面的某些实施例,所述最优初始焊接位置是求解最优初始焊接位置的数学模型得到的,所述最优初始焊接位置的数学模型表示为:min f(x,y,z)=kgjv·gjv+ks,e·(s+e)+kap·ap;其中,f(x,y,z)为最优初始焊接位置,gjv为搬运机器人和焊接机器人的全局关节变化量,ap为搬运机器人和焊接机器人的平均脉冲,s为焊接机器人的总路径长度,e为焊接机器人的能耗,kgjv、ks,e和kap分别是全局关节变化量的影响因子、总路径长度和能耗的影响因子和平均功耗的影响因子。
13、根据本申请的第一方面的某些实施例,所述求解最优初始焊接位置的数学模型,包括:
14、设置初始焊接位置作为粒子群中的粒子的位置,并设置粒子的运动速度;
15、根据所述焊接轮廓得到焊点序列;
16、根据所述第三规划轨迹得到关节运动序列;
17、根据所述焊点序列和所述关节运动序列计算适应度值;
18、根据所述适应度值得到个体最优位置和全局最优位置;
19、根据惯性权重系数、自我学习因子、群体学习因子、个体最优位置和全局最优位置更新粒子的位置;
20、根据更新后的粒子的位置确定最优初始焊接位置。
21、根据本申请的第一方面的某些实施例,所述更新后的粒子的位置表示为:其中,为更新后的粒子的位置,为更新前的粒子的位置,为更新后的粒子的运动速度,为更新前的粒子的运动速度,ω为惯性权重系数,c1为自我学习因子,c2为群体学习因子,为个体最优位置,为全局最优位置,r1和r2为随机数。
22、根据本申请的第一方面的某些实施例,在所述获取搬运机器人和焊接机器人的第三位姿信息以及焊接轮廓之前,所述焊接轨迹规划方法还包括:
23、获取待焊工件的第一位姿信息;
24、根据所述第一位姿信息进行轨迹规划得到第一规划轨迹;
25、根据所述第一规划轨迹控制搬运机器人将所述待焊工件运输至工件对接位置。
26、根据本申请的第一方面的某些实施例,在所述获取搬运机器人和焊接机器人的第三位姿信息以及焊接轮廓之前,所述焊接轨迹规划方法还包括:
27、获取所述待焊工件在所述工件对接位置的第二位姿信息和对接轮廓;
28、根据所述第二位姿信息和所述对接轮廓得到第二规划轨迹;
29、根据所述第二规划轨迹控制所述搬运机器人将所述待焊工件进行对接。
30、本申请的第二方面的实施例,一种焊接装置,包括:
31、视觉传感器,用于拍摄搬运机器人、焊接机器人和待焊工件的图像;
32、搬运机器人,用于夹持待焊工件;
33、焊接机器人,用于焊接待焊工件;
34、控制器,用于从图像中获取搬运机器人和焊接机器人的第三位姿信息、待焊工件的焊接轮廓以及当前焊缝形貌,根据所述第三位姿信息和所述焊接轮廓得到第三规划轨迹,根据所述第三规划轨迹控制所述焊接机器人对所述待焊工件进行焊接得到焊接工件,根据所述当前焊缝形貌调整所述第三规划轨迹。
35、本申请的第三方面的实施例,一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的多机器人的协作焊接方法。
36、本申请的第四方面的实施例,一种计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如上所述的多机器人的协作焊接方法。
37、上述方案至少具有以下的有益效果:考虑到焊接过程中的多目标性能指标,根据多目标指标寻得最优的各机器人关节运动序列,全面地考虑了焊接过程中的性能指标,以保证焊接质量。该方法具有参数少和简单易算的优点,通过根据当前焊缝形貌调整第三规划轨迹,通过对权重与学习因子的改进,能够保证全局搜索能力与收敛速度,避免陷入局部最优的情况。
技术特征:
1.一种多机器人的协作焊接方法,其特征在于,包括:
2.根据权利要求1所述的多机器人的协作焊接方法,其特征在于,所述根据所述第三位姿信息和所述焊接轮廓得到第三规划轨迹,包括:
3.根据权利要求2所述的多机器人的协作焊接方法,其特征在于,所述最优初始焊接位置是求解最优初始焊接位置的数学模型得到的,所述最优初始焊接位置的数学模型表示为:min f(x,y,z)=kgjv·gjv+ks,e·(s+e)+kap·ap;其中,f(x,y,z)为最优初始焊接位置,gjv为搬运机器人和焊接机器人的全局关节变化量,ap为搬运机器人和焊接机器人的平均脉冲,s为焊接机器人的总路径长度,e为焊接机器人的能耗,k gjv、ks,e和kap分别是全局关节变化量的影响因子、总路径长度和能耗的影响因子和平均功耗的影响因子。
4.根据权利要求3所述的多机器人的协作焊接方法,其特征在于,所述求解最优初始焊接位置的数学模型,包括:
5.根据权利要求4所述的多机器人的协作焊接方法,其特征在于,所述更新后的粒子的位置表示为:其中,为更新后的粒子的位置,为更新前的粒子的位置,为更新后的粒子的运动速度,为更新前的粒子的运动速度,ω为惯性权重系数,c1为自我学习因子,c2为群体学习因子,为个体最优位置,为全局最优位置,r1和r2为随机数。
6.根据权利要求1所述的多机器人的协作焊接方法,其特征在于,在所述获取搬运机器人和焊接机器人的第三位姿信息以及焊接轮廓之前,所述焊接轨迹规划方法还包括:
7.根据权利要求6所述的多机器人的协作焊接方法,其特征在于,在所述获取搬运机器人和焊接机器人的第三位姿信息以及焊接轮廓之前,所述焊接轨迹规划方法还包括:
8.一种焊接装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的多机器人的协作焊接方法。
10.一种计算机存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于执行如权利要求1至7中任一项所述的多机器人的协作焊接方法。
技术总结
本申请提供了多机器人的协作焊接方法、焊接装置、设备及介质,方法包括获取搬运机器人和焊接机器人的第三位姿信息以及待焊工件的焊接轮廓;根据第三位姿信息和焊接轮廓得到第三规划轨迹;根据第三规划轨迹控制焊接机器人对待焊工件进行焊接,得到焊接工件;在焊接过程中,获取待焊工件的当前焊缝形貌,根据当前焊缝形貌调整第三规划轨迹;能够保证全局搜索能力与收敛速度,避免陷入局部最优的情况。
技术研发人员:王宏民,吴龙华,黄俊霖,潘增喜,宋莹莹,林尧,邢博宸,肖慧玲
受保护的技术使用者:五邑大学
技术研发日:
技术公布日:2024/11/7
- 还没有人留言评论。精彩留言会获得点赞!