一种具有张拉特性的功能性超材料表面结构
本发明涉及机械超材料领域,可应用于机器人、减震、抗冲击、适形等领域,更具体的说是涉及一种具有张拉特性的功能性超材料表面结构。
背景技术:
1、随着智能制造的快速发展,机器人技术逐渐成为推动产业转型和提高效率的关键技术之一。作为机器人最常用的末端执行器之一,适形结构的性能对机器人工作效率和产品质量的影响至关重要。目前,适形结构主要有传统刚性适形结构和柔性适形结构两大类。
2、传统刚性适形结构具有稳定性高,可靠性强,适用范围广等优点,但是对于异形、曲线或不规则形状的物体,刚性适形结构无法表现足够的适应性和灵活性,使得适形效果较差。其适应性差,操作不灵活,质量较大等问题亟待解决。柔性适形结构具有可重复性高,适应性强,安全性高等优点,但是软材料质地限制了夹取物体的重量和夹持器的抓握力,无法夹取过重或者过大的物体。同时也会产生适应形状过程中的不稳定性,造成运动范围受限制,其抓握力、运动范围和制造成本方面仍然存在局限。
3、因此,如何研究出一种兼具自适应,自稳定,质量轻,刚度可调节的适形结构是本领域技术人员亟需解决的问题。
技术实现思路
1、为此,本发明的一个目的在于提出了一种具有张拉特性的功能性超材料表面结构,克服了现有适形结构的不足。
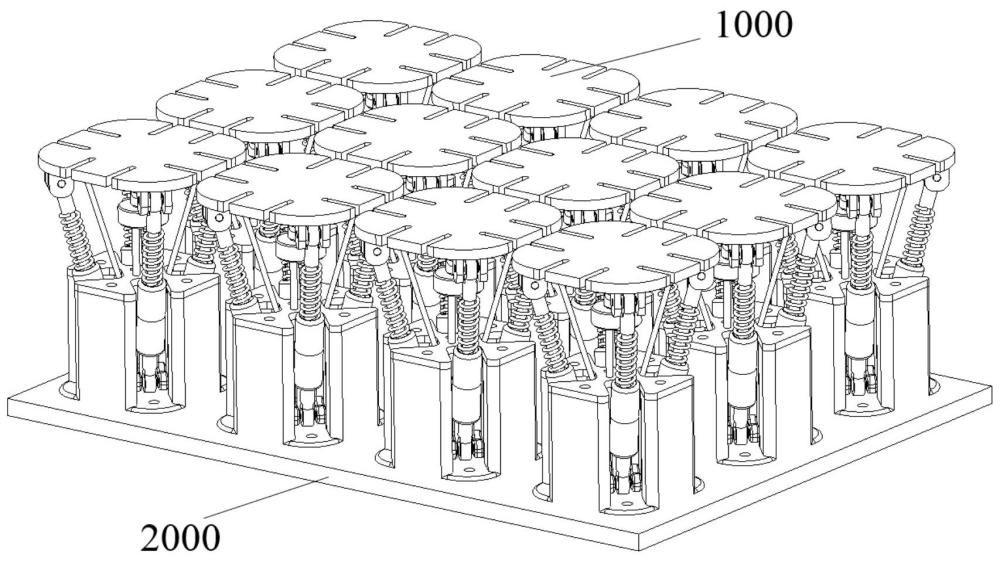
2、本发明提供了一种具有张拉特性的功能性超材料表面结构,包括可编程刚度模块化单元结构和底板。
3、所述可编程刚度模块化单元结构共十二组,所述可编程刚度模块化单元结构包括支撑部组件,所述支撑部组件包括底座和连接板件,所述底座作为单元结构整体的支撑部。
4、自由度约束组件,所述自由度约束组件包括万向节,万向节连接件,第一光轴,第二光轴,所述第一光轴共有两组,所述第二光轴共有八组。
5、张拉特性组件,所述张拉特性组件包括刚性表面、受拉弹性体、压缩弹簧、以及连接杆件。
6、所述刚性表面为正方形板件,正方形板件的四个角位置做了圆角处理,四个角的下方分别有四个轴座。
7、所述受拉弹性体共有四组,所述压缩弹簧共有四组,四组所述受拉弹性体与四组所述压缩弹簧连接于所述刚性表面与所述底座之间,并交错布置。
8、十二组所述可编程刚度模块化单元结构通过所述支撑部组件中的所述底座阵列固定于所述底板上。
9、所述可编程刚度模块化单元结构的所述刚性表面在受到外部载荷的作用下,在所述自由度约束组件与所述张拉特性组件共同作用下,使所述刚性表面在受到外部载荷时,既可以发生翻转,又可以发生纵向的移动,从而产生变形适应物体形状。在撤去外部载荷时,所述刚性表面会在张拉整体结构的作用下,自动恢复至初始状态。
10、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种具有张拉特性的功能性超材料表面结构,其兼具自适应,自稳定,质量轻,刚度可调节等特点,克服了传统刚性适形结构适应性差,操作不灵活,质量较大及柔性适形结构会产生适应形状过程中的不稳定性,运动范围受限制,和制造成本方面高等不足。本发明提出的一种具有张拉特性的功能性超材料表面结构,可以通过控制弹性构件的刚度进而控制单元结构的变形程度,其小体积,模块化的设计可以使单元结构通过阵列等方式,扩大结构的适形物体的种类和大小,使具有张拉特性的功能性超材料表面结构的应用更加广泛。
11、进一步地,所述连接杆件为长方体形杆件,其上端的横截面近似为正方形,四个侧面底端分别有四个轴座,在所述连接杆件的顶面开设四个通孔,四个通孔环形阵列布置,其阵列中心与所述连接杆件的顶面中心重合,且四个通孔的圆心位于所述连接杆件的顶面的对角线上,圆心在同一条对角线上的通孔为一组通孔,共计两组通孔。
12、进一步地,四组所述受拉弹性体,每一组所述受拉弹性体的第一端与所述刚性表面的轴座内侧固定连接,每一组所述受拉弹性体的第二端与所述连接杆件的四个侧面顶端固定连接。
13、进一步地,四组所述压缩弹簧的两端为球形关节,所述压缩弹簧的第一端与刚性表面的每个轴座通过所述第二光轴连接,所述压缩弹簧的第二端与所述连接杆件的每个轴座通过所述第二光轴连接。
14、进一步地,所述万向节的第一端与所述刚性表面中心位置固定连接,所述万向节的第二端与所述万向节连接件上端固定连接,两组所述第一光轴第一端与所述万向节连接件下端固定连接,两组所述第一光轴的轴线分别与所述连接杆件的一组通孔轴线重合,两组所述第一光轴可以在所述连接杆件的一组通孔中滑动。
15、进一步地,所述连接板件与所述连接杆件的上端通过另一组通孔固定连接,所述连接板件与所述底座固定连接,所述连接板件与所述底座的形状设计目的是为了避免构件之间发生干涉。
16、本发明的另一目的在于提供了一种具有张拉特性的功能性超材料表面结构,包括装置本体及与其配合连接的上述所述的一种具有张拉特性的功能性超材料表面结构。
技术特征:
1.一种具有张拉特性的功能性超材料表面结构,其特征在于,包括:可编程刚度模块化单元结构(1000)和底板(2000);
2.根据权利要求1所述的一种具有张拉特性的功能性超材料表面结构,其特征在于,所述连接杆件(304)为长方体形杆件,其上端的横截面近似为正方形,四个侧面底端分别有四个轴座,在所述连接杆件(304)的顶面开设四个通孔,四个通孔环形阵列布置,其阵列中心与所述连接杆件(304)的顶面中心重合,且四个通孔的圆心位于所述连接杆件(304)的顶面的对角线上,圆心在同一条对角线上的通孔为一组通孔,共计两组通孔。
3.根据权利要求1所述的一种具有张拉特性的功能性超材料表面结构,其特征在于,四组所述受拉弹性体(302),每一组所述受拉弹性体(302)的第一端与所述刚性表面(301)的轴座内侧固定连接,每一组所述受拉弹性体(302)的第二端与所述连接杆件(304)的四个侧面顶端固定连接。
4.根据权利要求3所述的一种具有张拉特性的功能性超材料表面结构,其特征在于,四组所述压缩弹簧(303)的两端为球形关节,所述压缩弹簧(303)的第一端与刚性表面(301)的每个轴座通过所述第二光轴(204)连接,所述压缩弹簧(303)的第二端与所述连接杆件(304)的每个轴座通过所述第二光轴(204)连接;在四组所述受拉弹性体(302)与四组所述压缩弹簧(303)的共同作用下,形成了具有张拉特性的张拉整体结构。
5.根据权利要求4所述的一种具有张拉特性的功能性超材料表面结构,其特征在于,在张拉整体结构的基础上,添加所述的自由度约束组件(200),主要包括:所述万向节(201),所述万向节连接件(202)和所述第一光轴(203);所述万向节(201)可以限制张拉整体结构的自由度,只保留两个翻转自由度,所述万向节连接件(202),所述第一光轴(203),与所述连接杆件(304)共同构成了纵向上的移动副。
6.根据权利要求5所述的一种具有张拉特性的功能性超材料表面结构,其特征在于,可以通过控制可编程刚度模块化单元结构(1000)的弹性构件的刚度进而控制单元结构的变形程度。
7.根据权利要求1所述的一种具有张拉特性的功能性超材料表面结构,其特征在于,所述万向节(201)的第一端与所述刚性表面(301)中心位置固定连接,所述万向节(201)的第二端与所述万向节连接件(202)上端固定连接,两组所述第一光轴(203)第一端与所述万向节连接件(202)下端固定连接,两组所述第一光轴(203)的轴线分别与所述连接杆件(304)的一组通孔轴线重合,两组所述第一光轴(203)可以在所述连接杆件(304)的一组通孔中滑动。
8.根据权利要求1所述的一种具有张拉特性的功能性超材料表面结构,其特征在于,所述连接板件(102)与所述连接杆件(304)的上端通过另一组通孔固定连接,所述连接板件(102)与所述底座(101)固定连接。
9.一种具有张拉特性的功能性超材料表面结构,其特征在于,包括结构本体及与配合连接的如权利要求1-8任一项所述的一种具有张拉特性的功能性超材料表面结构。
技术总结
本发明涉及一种具有张拉特性的功能性超材料表面结构,包括可编程刚度模块化单元结构和底板,其中可编程刚度模块化单元结构包括支撑部组件,自由度约束组件和张拉特性组件。本发明克服了传统刚性适形结构适应性差,操作不灵活,质量较大和柔性适形结构会产生适形过程中的不稳定性,运动范围受限制等不足。本发明提供的一种具有张拉特性的功能性超材料表面结构,兼具柔顺性,稳定性,操作灵活,模块化,可编程等特点,具有重要的学术意义。本发明提供的一种具有张拉特性的功能性超材料表面结构结构简单,有望大力发展,可以在多领域实现其应用价值。
技术研发人员:孙建伟,张松宇,盖铭宇,栾亦鹏,张美玲,张浩然,禤德瑾,刘佳茗
受保护的技术使用者:长春工业大学
技术研发日:
技术公布日:2024/8/21
- 还没有人留言评论。精彩留言会获得点赞!