基于零空间投影的冗余机器人连续控制方法
本发明涉及机器人运动控制,尤其涉及基于零空间投影的冗余机器人连续控制方法。
背景技术:
1、在机器人运动控制领域,如何通过对机器人运动过程中的控制,使其适应动态的环境,是一个重要的挑战,机器人在执行任务时,不仅需要实现轨迹跟踪,还必须确保满足环境中的各种约束条件,传统的关节空间控制方法通过预先规划机器人的末端执行器轨迹,直接控制关节轨迹,然而,在关节空间中实现环境约束非常困难,典型的联合空间控制框架仍然存在诸多局限性。
2、现有技术在解决机器人运动控制问题时,通常采用伪逆方法来求解运动学方程,以实现轨迹跟踪和环境约束的满足,然而,这些方法在面对多任务控制和动态环境时存在显著缺点,首先,伪逆方法在任务激活变化时容易产生不连续性,影响控制的平滑性和稳定性,其次,在激活任务之间出现相互冲突的情况下,现有方法难以有效处理,导致控制精度和响应速度降低,此外,现有方法在奇异情况下数值稳定性不足,限制了机器人的适应能力。
3、为了解决上述问题,本发明提出了一种基于连续整形零空间投影和任务控制的连续逆方法,旨在提升冗余机器人在动态环境中的控制性能,本发明提供了一种高效、稳定且适应性强的机器人控制方法,显著提升机器人在复杂动态环境中的工作性能和可靠性。
技术实现思路
1、基于上述目的,本发明提供了基于零空间投影的冗余机器人连续控制方法。
2、基于零空间投影的冗余机器人连续控制方法,包括以下步骤:
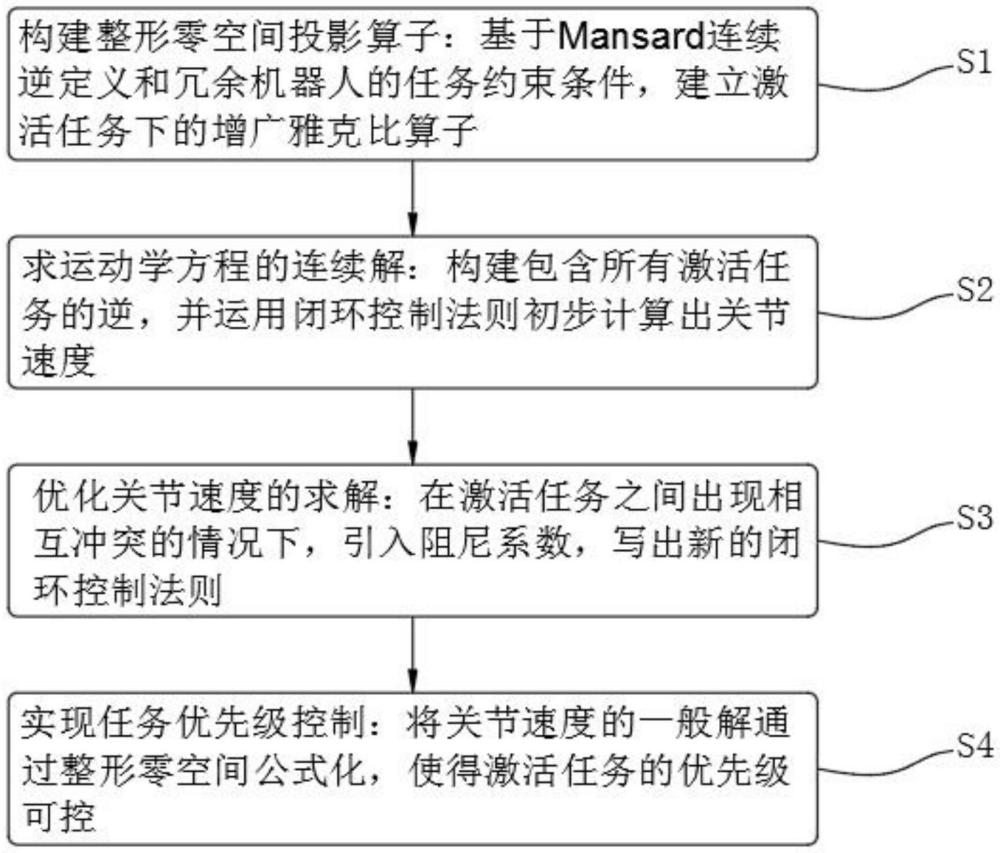
3、s1,构建整形零空间投影算子:基于mansard连续逆定义和冗余机器人的任务约束条件,建立激活任务下的增广雅克比算子;
4、s2,求运动学方程的连续解:构建包含所有激活任务的逆,并运用闭环控制法则初步计算出关节速度;
5、s3,优化关节速度的求解:在激活任务之间出现相互冲突的情况下,引入阻尼系数,写出新的闭环控制法则;
6、s4,实现任务优先级控制:将关节速度的一般解通过整形零空间公式化,使得激活任务的优先级可控。
7、进一步的,所述s1中的构建整形零空间投影算子包括:
8、s11,定义任务约束条件:定义冗余机器人的任务约束条件,约束条件包括等式约束和不等式约束;
9、所述等式约束的计算公式为:
10、xe=f(q);
11、其中,q∈rn是关节位置的向量,xe∈rme是表示等式约束的向量,f(q):rn→rme是等式任务函数;
12、所述不等式约束的计算公式为:
13、g(q)≥gu;
14、其中,g(q):是约束函数,me∈r是所有不等式任务的维数,是不等式任务的阈值;
15、s12,建立增广雅克比算子:基于任务约束条件,建立激活任务下的增广雅克比算子,表示为:
16、j=[j1,j2…jk]t;
17、
18、其中,j是所有任务的增广雅克比矩阵,是第一到第i个任务的增广雅克比矩阵。
19、进一步的,所述激活任务下的增广雅克比算子的计算公式为:
20、
21、其中,ji是第i个任务的雅克比矩阵(i∈{1,…,k}),是h激活的前i个任务的增广雅克比算子的整形零空间投影算子;
22、bi∈rn×n定义为:
23、进一步的,所述增广雅克比算子的整形零空间投影算子通过i个递归运算获得,由于是对称矩阵,重新表述为:
24、
25、其中,vj和σj分别是第j个输入奇异向量和奇异值。
26、进一步的,所述s2中的求运动学方程的连续解包括:
27、s21,构建包含所有激活任务的逆:基于增广雅克比算子构建包含所有激活任务的逆,计算公式为:
28、
29、其中,k是任务个数,h是一个对角激活矩阵,其元素为hi∈[0,1],i∈{1,…,k},是包含所有任务的整形零空间投影算子;
30、s22,运用闭环控制法则:运用闭环控制法则计算关节速度,计算公式为:
31、
32、其中,e=x-xd是跟踪误差,xd是所需轨迹的位置,ke>0是误差反馈增益。
33、进一步的,所述s3中的优化关节速度的求解包括:
34、s31,引入阻尼系数:在激活任务之间出现相互冲突的情况下,引入阻尼系数;
35、s32,写出新的闭环控制法则:写出新的闭环控制法则,优化求解关节速度。
36、进一步的,所述新的闭环控制法则表示为:
37、
38、进一步的,所述bi引入阻尼因子后的计算公式为:
39、
40、其中,正标量λi是bi(i∈{1,…,k})的阻尼因子;
41、
42、σi,min≥εi;
43、其中,σi,m是的最小奇异值,εi是奇异回避域的长度,λi,max是最大阻尼参数。
44、进一步的,所述s4中的关节速度的一般解的计算公式为:
45、
46、其中,z∈rn是自由向量。
47、本发明的有益效果:
48、本发明,通过引入整形零空间投影算子,能够在实现轨迹跟踪任务的同时,确保机器人能够满足环境约束,特别适用于多任务控制场景,确保各个任务的优先级控制,使得完全活跃任务的性能不受其他任务的影响,此外,通过构建包含所有激活任务的逆矩阵并运用闭环控制法则,可以计算出优化的关节速度,使机器人在复杂环境中具备更高的适应性和稳定性。
49、本发明,通过引入阻尼系数来处理激活任务之间的冲突问题,使得控制算法在奇异情况下具有更高的数值稳定性,使用递归运算获得增广雅克比算子的整形零空间投影,并通过优化关节速度的求解,能够在保证任务优先级的同时,提高控制精度和响应速度,整体上,提供了一种高效、稳定且适应性强的机器人控制方法,有助于提升机器人在复杂动态环境中的工作性能和可靠性。
技术特征:
1.基于零空间投影的冗余机器人连续控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述s1中的构建整形零空间投影算子包括:
3.根据权利要求2所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述激活任务下的增广雅克比算子的计算公式为:
4.根据权利要求3所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述增广雅克比算子的整形零空间投影算子通过i个递归运算获得,由于是对称矩阵,重新表述为:
5.根据权利要求4所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述s2中的求运动学方程的连续解包括:
6.根据权利要求5所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述s3中的优化关节速度的求解包括:
7.根据权利要求6所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述新的闭环控制法则表示为:
8.根据权利要求7所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述bi引入阻尼因子后的计算公式为:
9.根据权利要求8所述的基于零空间投影的冗余机器人连续控制方法,其特征在于,所述s4中的关节速度的一般解的计算公式为:
技术总结
本发明涉及机器人运动控制技术领域,具体涉及基于零空间投影的冗余机器人连续控制方法,包括以下步骤:S1,构建整形零空间投影算子:基于Mansard连续逆定义和冗余机器人的任务约束条件,建立激活任务下的增广雅克比算子;S2,求运动学方程的连续解:构建包含所有激活任务的逆,并运用闭环控制法则初步计算出关节速度;S3,优化关节速度的求解:在激活任务之间出现相互冲突的情况下,引入阻尼系数,写出新的闭环控制法则;S4,实现任务优先级控制:将关节速度的一般解通过整形零空间公式化,使得激活任务的优先级可控。本发明,有助于提升机器人在复杂动态环境中的工作性能和可靠性。
技术研发人员:奚若海,高树华,王静,王正方,高升,秦泽坤
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!