一种油田智能修井作业用自动定位机械手的制作方法
本发明涉及修井自动化设备,具体为一种油田智能修井作业用自动定位机械手。
背景技术:
1、修井自动化设备在油田开采过程中起到了至关重要的作用,这些设备通过自动化技术,实现油井的固井、升降管、油泵控制等修井作业的自动化操作,大大提高了修井作业的效率和质量,具体来说,修井自动化设备主要依赖于控制装置、测量装置、动力装置、管线液压系统以及操作系统等组成部分,其中控制装置包括旋转、升降、定位等结构构成,修井自动化设备通过控制装置驱动测量设备和动力系统将流体输送到油管内,从而完成各项工作。
2、目前现有技术中,对位置有精确要求的动作控制依靠比例阀调节,具有比较精准的旋转位置定位,但修井自动化设备的使用环境恶劣,现场存在油泥砂砾,在工作过程中,需要对液压快速接头进行拔插,这个过程会造成油泥砂砾通过接头进入液压油路,由于使用的比例阀精度较高,混入油路的油泥砂砾会造成比例阀的卡阻和损坏,影响机械动作的运转,故而提出一种油田智能修井作业用自动定位机械手来解决上述问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种油田智能修井作业用自动定位机械手,具备自动旋转定位且使用寿命长的优点,解决了修井自动化设备的使用环境恶劣,现场存在油泥砂砾,在工作过程中,需要对液压快速接头进行拔插,这个过程会造成油泥砂砾通过接头进入液压油路,由于使用的比例阀精度较高,混入油路的油泥砂砾会造成比例阀的卡阻和损坏,影响机械动作的运转的问题。
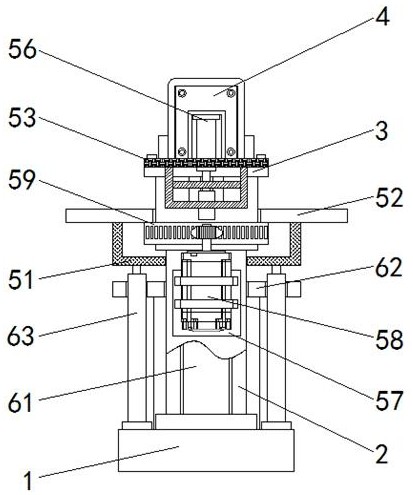
2、为实现上述目的,本发明提供如下技术方案:一种油田智能修井作业用自动定位机械手,包括设备底座,所述设备底座的顶部设置有支撑臂,所述支撑臂上设置有旋转台和机械臂,所述支撑臂上设置有旋转定位结构、驱动结构以及升降结构;
3、所述旋转定位结构包括有固定安装于支撑臂外表面的支撑框,所述支撑框的顶部固定安装有用于定位的限位盘,所述旋转台的一端贯穿支撑框和限位盘,所述旋转台分别与支撑框和限位盘转动安装,所述旋转台的顶部固定安装有与机械臂固定连接的安装板,所述安装板的底部固定安装有制动导向支架,所述制动导向支架的内部滑动安装有一端贯穿并延伸至限位盘内部的定位柱,所述安装板上设置有用于控制定位柱上下移动的进给部件;
4、所述驱动结构包括有安装台,所述安装台固定安装于支撑臂的正面,所述安装台上固定安装有异步电机,所述异步电机的顶部设置有用于带动旋转台旋转的传动部件, 所述进给部件包括有安装架和电动推杆,所述电动推杆固定安装于安装架上且一端贯穿并延伸至制动导向支架的内部,所述安装架固定安装于安装板的顶部,所述电动推杆的伸缩端与定位柱的顶部固定连接。
5、进一步,所述升降结构包括有固定安装于设备底座顶部的连接柱,所述支撑臂滑动安装于连接柱的外表面,所述设备底座的顶部固定安装有导向盘,所述导向盘上设置有用于控制支撑臂上下移动的升降部件,所述导向盘上设置有用于限制支撑框稳定移动的支撑部件。
6、进一步,所述支撑臂安装于设备底座的顶部,所述旋转台转动安装于支撑臂的顶部。
7、进一步,所述制动导向支架包括有矩形框和支撑板,所述支撑板固定安装于矩形框的内腔左右两侧壁之间,所述矩形框的内部和支撑板均开设有通孔,所述通孔的尺寸与定位柱的尺寸相适配,所述矩形框固定安装于安装板的底部。
8、进一步,所述安装台包括有背板和两个安装抱箍,两个所述安装抱箍均固定安装于背板的正面,所述异步电机固定安装于两个安装抱箍的内部。
9、进一步,所述传动部件包括有齿环和齿轮,所述齿环和齿轮的外表面相啮合,所述齿环固定安装于旋转台的外表面,所述齿轮固定安装于异步电机输出轴的外表面。
10、进一步,所述升降部件包括有两个升降气缸,两个所述升降气缸均固定安装于导向盘上,两个所述升降气缸的伸缩端分别与支撑框的底部固定连接,两个所述升降气缸的底部分别与设备底座的顶部固定连接。
11、进一步,所述支撑部件包括有导向柱和圆槽,所述圆槽开设于导向盘的内部,所述导向柱固定安装于支撑框的底部且一端贯穿导向盘内部开设的圆槽。
12、进一步,所述限位盘上开设有多个定位孔,所述定位柱的一端贯穿并延伸至定位孔的内部。
13、进一步,所述导向盘的底部固定安装有两个弧形支撑板,两个所述弧形支撑板分别与设备底座的顶部固定连接,所述导向盘与支撑臂外表面滑动连接。
14、与现有技术相比,本发明提供了一种油田智能修井作业用自动定位机械手,具备以下有益效果:
15、1、该油田智能修井作业用自动定位机械手,通过设置有旋转定位结构和驱动结构,实现了利用异步电机作为驱动源并通过机械传动控制旋转台旋转,从而利用旋转台顶部的安装板带动机械臂旋转,从而完成机械臂旋转操作,而且可以利用制动导向支架上进给部件中的电动推杆控制定位柱插入限位盘,从而达到固定限位盘和制动导向支架的位置,实现快速且稳定的固定机械臂,利用简单的机械结构实现控制机械臂的旋转定位,从而解决了混入油路的油泥砂砾会造成比例阀的卡阻和损坏的问题,且保障旋转定位操作的正常运转。
16、2、该油田智能修井作业用自动定位机械手,通过设置有升降结构,从而便于控制机械臂的高度,进而配合旋转定位结构的使用,从而实现更加精细的控制机械臂的工作,从而使得油田修井的工作更加方便。
技术特征:
1.一种油田智能修井作业用自动定位机械手,包括设备底座(1),其特征在于:所述设备底座(1)的顶部设置有支撑臂(2),所述支撑臂(2)上设置有旋转台(3)和机械臂(4),所述支撑臂(2)上设置有旋转定位结构、驱动结构以及升降结构;
2.根据权利要求1所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述升降结构包括有固定安装于设备底座(1)顶部的连接柱(61),所述支撑臂(2)滑动安装于连接柱(61)的外表面,所述设备底座(1)的顶部固定安装有导向盘(62),所述导向盘(62)上设置有用于控制支撑臂(2)上下移动的升降部件(63),所述导向盘(62)上设置有用于限制支撑框(51)稳定移动的支撑部件(64)。
3.根据权利要求1所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述支撑臂(2)安装于设备底座(1)的顶部,所述旋转台(3)转动安装于支撑臂(2)的顶部。
4.根据权利要求1所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述制动导向支架(54)包括有矩形框和支撑板,所述支撑板固定安装于矩形框的内腔左右两侧壁之间,所述矩形框的内部和支撑板均开设有通孔,所述通孔的尺寸与定位柱(55)的尺寸相适配,所述矩形框固定安装于安装板(53)的底部。
5.根据权利要求1所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述安装台(57)包括有背板和两个安装抱箍,两个所述安装抱箍均固定安装于背板的正面,所述异步电机(58)固定安装于两个安装抱箍的内部。
6.根据权利要求1所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述传动部件(59)包括有齿环和齿轮,所述齿环和齿轮的外表面相啮合,所述齿环固定安装于旋转台(3)的外表面,所述齿轮固定安装于异步电机(58)输出轴的外表面。
7.根据权利要求2所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述升降部件(63)包括有两个升降气缸,两个所述升降气缸均固定安装于导向盘(62)上,两个所述升降气缸的伸缩端分别与支撑框(51)的底部固定连接,两个所述升降气缸的底部分别与设备底座(1)的顶部固定连接。
8.根据权利要求2所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述支撑部件(64)包括有导向柱和圆槽,所述圆槽开设于导向盘(62)的内部,所述导向柱固定安装于支撑框(51)的底部且一端贯穿导向盘(62)内部开设的圆槽。
9.根据权利要求1所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述限位盘(52)上开设有多个定位孔,所述定位柱(55)的一端贯穿并延伸至定位孔的内部。
10.根据权利要求2所述的一种油田智能修井作业用自动定位机械手,其特征在于:所述导向盘(62)的底部固定安装有两个弧形支撑板,两个所述弧形支撑板分别与设备底座(1)的顶部固定连接,所述导向盘(62)与支撑臂(2)外表面滑动连接。
技术总结
本发明涉及一种油田智能修井作业用自动定位机械手,属于修井自动化设备技术领域,包括设备底座,所述设备底座的顶部设置有支撑臂,所述支撑臂上设置有旋转台和机械臂,所述支撑臂上设置有旋转定位结构、驱动结构以及升降结构。该油田智能修井作业用自动定位机械手,实现了利用异步电机作为驱动源并通过机械传动控制旋转台旋转,利用旋转安装板带动机械臂旋转,从而完成机械臂旋转操作,而且可以利用制动导向支架上进给部件中的电动推杆控制定位柱插入限位盘,从而达到固定限位盘和制动导向支架的位置,实现快速且稳定的固定机械臂,而且便于利用升降结构控制机械臂的高度,进而配合旋转定位结构的使用,从而实现更加精细的控制机械臂的工作。
技术研发人员:张喜庆,马海峰,张端光,沈君芳,汪秋陵,范晓贤,于吉迪,吕海龙,陈龙
受保护的技术使用者:胜利油田胜机石油装备有限公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!