具有大摆角输出能力的空间六自由度全并联机构
本发明涉及机械加工,具体而言,涉及一种具有大摆角输出能力的空间六自由度全并联机构。
背景技术:
1、多轴并联机构是一种由多条支链将定平台与动平台相连接的闭环机构,工业机器人采用并联机构相比采用串联机构,结构更加紧凑,具有高刚度、高精度和高动态响应的特性。
2、相关技术中的并联加工机构,支链数量越多其刚度性能越好,但相对运动学性能受限越严重,相关技术中的并联加工机构,支链数量多为三至五个,六轴并联加工机构相比自由度较少的并联加工机构,具有更好的刚度性能,但铰链和支链的布局受限严重,严重制约了机构的运动学性能提升,严重影响机构的优质姿态工作空间大小。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种具有大摆角输出能力的空间六自由度全并联机构,该具有大摆角输出能力的空间六自由度全并联机构具有刚度高、承载力强、运动学性能好、摆角输出能力大等优点。
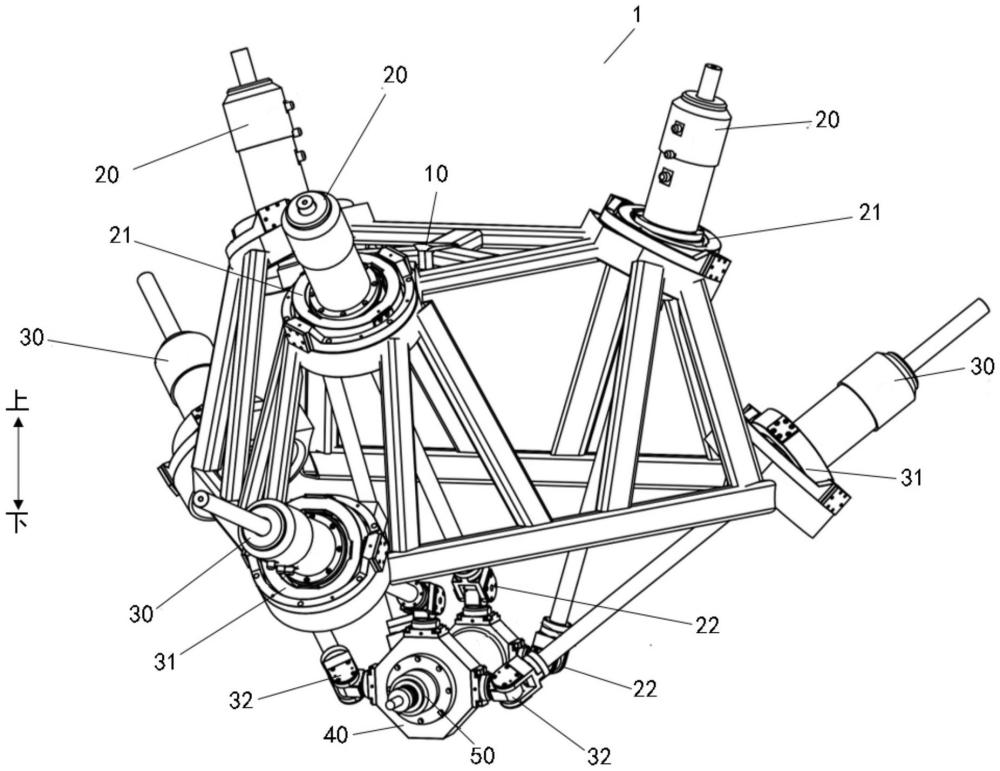
2、为实现上述目的,根据本发明的第一方面的实施例提出一种具有大摆角输出能力的空间六自由度全并联机构,所述具有大摆角输出能力的空间六自由度全并联机构包括:定平台;三个上支链,三个所述上支链的上端通过上层上铰链与所述定平台相连,三个所述上层上铰链均经过上假想圆;三个下支链,三个所述下支链的上端通过下层上铰链与所述定平台相连,三个所述下层上铰链均经过下假想圆,所述上假想圆和所述下假想圆平行间隔设置;动平台,三个所述上支链的下端通过第一下铰链与所述动平台相连,三个所述下支链的下端通过第二下铰链与所述动平台相连;加工主轴,所述加工主轴设在所述动平台上。
3、根据本发明实施例的具有大摆角输出能力的空间六自由度全并联机构,具有刚度高、承载力强、运动学性能好、摆角输出能力大等优点。
4、另外,根据本发明上述实施例的具有大摆角输出能力的空间六自由度全并联机构还可以具有如下附加的技术特征:
5、根据本发明的一个实施例,所述上假想圆和所述下假想圆同轴设置。
6、根据本发明的一个实施例,三个所述第一下铰链均经过第一假想圆,三个所述第二下铰链均经过第二假想圆,所述第一假想圆位于所述第二假想圆上方且第一假想圆和所述第二假想圆同轴平行间隔设置。
7、根据本发明的一个实施例,所述上假想圆、所述下假想圆、所述第一假想圆和所述第二假想圆同轴时,每个所述上支链在所述上假想圆所在平面内的投影倾斜于所述上假想圆的径向,每个所述下支链在所述下假想圆所在平面内的投影倾斜于所述下假想圆的径向。
8、根据本发明的一个实施例,三个所述第一下铰链中的两个在所述动平台径向上相对设置且另一个所述第一下铰链设在相对的两个所述第一下铰链的假想连线的法向上,三个所述第二下铰链中的两个在所述动平台径向上相对设置且另一个所述第二下铰链设在相对的两个所述第二下铰链的假想连线的法向上。
9、根据本发明的一个实施例,三个所述上层上铰链与所述上假想圆的圆心的假想连线分别与三个所述下层上铰链与所述下假想圆的圆心的假想连线在水平面内的投影一一对应地重合。
10、根据本发明的一个实施例,三个所述上层上铰链与所述上假想圆的圆心的假想连线分别与三个所述下层上铰链与所述下假想圆的圆心的假想连线在水平面内的投影错开预定角度。
11、根据本发明的一个实施例,每个所述上支链和所述下支链均包括电机和丝杠,所述电机与所述丝杠传动连接且通过所述电机的转动带动所述丝杠沿中心轴线转动且沿轴向移动。
12、根据本发明的一个实施例,所述上层上铰链和所述下层上铰链中的每一个均为虎克铰链且包括:安装外环,所述安装外环安装在所述定平台上;转动中环,所述转动中环可转动地设在所述安装外环内;安装内环,所述安装内环可转动地设在所述转动中环内,所述安装内环相对所述转动中环的转动轴线与所述转动中环相对所述安装外环的转动轴线垂直,所述电机安装在所述安装内环内,所述第一下铰链和所述第二下铰链中的每一个均为虎克铰链且包括:安装座,所述安装座安装在所述动平台上;转动柱,所述转动柱可沿中心轴线转动地与所述安装座相连;u形件,所述u形件与所述转动柱可转动地相连且转动轴线垂直于所述转动柱的轴向,所述丝杠的下端与所述u形件相连。
13、根据本发明的一个实施例,所述动平台具有主轴套,所述加工主轴配合在所述主轴套内。
14、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种具有大摆角输出能力的空间六自由度全并联机构,其特征在于,包括:
2.根据权利要求1所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,所述上假想圆和所述下假想圆同轴设置。
3.根据权利要求1所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,三个所述第一下铰链均经过第一假想圆,三个所述第二下铰链均经过第二假想圆,所述第一假想圆位于所述第二假想圆上方且第一假想圆和所述第二假想圆同轴平行间隔设置。
4.根据权利要求3所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,所述上假想圆、所述下假想圆、所述第一假想圆和所述第二假想圆同轴时,每个所述上支链在所述上假想圆所在平面内的投影倾斜于所述上假想圆的径向,每个所述下支链在所述下假想圆所在平面内的投影倾斜于所述下假想圆的径向。
5.根据权利要求1所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,三个所述第一下铰链中的两个在所述动平台径向上相对设置且另一个所述第一下铰链设在相对的两个所述第一下铰链的假想连线的法向上,三个所述第二下铰链中的两个在所述动平台径向上相对设置且另一个所述第二下铰链设在相对的两个所述第二下铰链的假想连线的法向上。
6.根据权利要求1所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,三个所述上层上铰链与所述上假想圆的圆心的假想连线分别与三个所述下层上铰链与所述下假想圆的圆心的假想连线在水平面内的投影一一对应地重合。
7.根据权利要求1所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,三个所述上层上铰链与所述上假想圆的圆心的假想连线分别与三个所述下层上铰链与所述下假想圆的圆心的假想连线在水平面内的投影错开预定角度。
8.根据权利要求1所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,每个所述上支链和所述下支链均包括电机和丝杠,所述电机与所述丝杠传动连接且通过所述电机的转动带动所述丝杠沿中心轴线转动且沿轴向移动。
9.根据权利要求8所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,所述上层上铰链和所述下层上铰链中的每一个均为虎克铰链且包括:
10.根据权利要求1所述的具有大摆角输出能力的空间六自由度全并联机构,其特征在于,所述动平台具有主轴套,所述加工主轴配合在所述主轴套内。
技术总结
本发明公开了一种具有大摆角输出能力的空间六自由度全并联机构,具有大摆角输出能力的空间六自由度全并联机构包括:定平台;三个上支链,三个上支链的上端通过上层上铰链与定平台相连,三个上层上铰链均经过上假想圆;三个下支链,三个下支链的上端通过下层上铰链与定平台相连,三个上层下支链均经过下假想圆,上假想圆和下假想圆平行间隔设置;动平台,三个上支链的下端通过第一下铰链与动平台相连,三个下支链的下端通过第二下铰链与动平台相连;加工主轴,加工主轴设在动平台上。根据本发明实施例的具有大摆角输出能力的空间六自由度全并联机构具有刚度高、承载力强、运动学性能好、摆角输出能力大等优点。
技术研发人员:谢福贵,刘辛军,徐晨昊,解增辉
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!