一种桁架机械手的制作方法
本发明涉及袋装物料生产,具体为一种桁架机械手。
背景技术:
1、袋装物料在生产过程中,需要抓取设备将袋装物料搬运出生产线,便于做进一步处理。
2、现有的搬运方式,主要有人工搬运、吸盘夹具机器人搬运。人工搬运袋装物料效率较低,在搬运过程中存在安全隐患。现有工业机器人搬运袋装物料设备成本较高现有工业搬运机器人通常只是针对单一尺寸袋装物料,兼容性低,无法满足多尺寸的大规模生产需求,基于现有的技术不足,本发明设计了一种桁架机械手。
技术实现思路
1、本发明提供了一种桁架机械手,具备对不同尺寸物料抓取,满足大规模生产需求的优点,解决了上述背景技术中提到的问题。
2、本发明提供如下技术方案:一种桁架机械手,安装于机械手行架,所述机械手行架的内部两侧设置有x轴电机驱动机构,两个所述x轴电机驱动机构的顶部设置有y轴电机驱动机构,两个所述y轴电机驱动机构的一侧设置有z轴气动驱动机构,两个所述z轴气动驱动机构的底部设置有可变距吸盘机构,所述机械手行架的顶部两侧设置有x轴接近开关限位结构,所述机械手行架的内部设置有四个x轴防撞缓冲结构;两个所述可变距吸盘机构包括连接法兰、吸盘支架、弹簧缓冲架、第二气缸、真空吸盘、第二滑块直线模组组成,所述连接法兰底部固定安装有吸盘支架,所述吸盘支架的下侧中间位置安装有弹簧缓冲架,所述弹簧缓冲架与第二滑块直线模组滑动连接,所述第二滑块直线模组安装在吸盘支架下侧两端位置,所述第二气缸固定在吸盘支架上方,所述第二气缸伸缩杆与弹簧缓冲架后侧固定连接。
3、作为本发明的一种优选技术方案,所述x轴电机驱动机构包括中置减速电机、传动杆、横梁、万向节、滑块安装板、x轴滑块直线模组,所述x轴滑块直线模组中两条直线导轨分别安装在机械手行架两根长梁内侧。
4、作为本发明的一种优选技术方案,所述x轴齿轮齿条组中齿条安装在直线导轨中间,且齿轮通过滑块安装板与齿条啮合。
5、作为本发明的一种优选技术方案,所述传动杆两端与所述万向节连接,所述万向节另一端连接齿轮轴。
6、作为本发明的一种优选技术方案,所述传动轴穿过中置减速电机,所述中置减速电机安装在横梁上,所述中置减速电机驱动传动轴,且传动轴带动万向节与齿轮,齿轮啮合齿条移动,带动滑块移动。
7、作为本发明的一种优选技术方案,所述y轴电机驱动机构包括滑台、减速电机、y轴齿轮齿条组、y轴滑块直线模组,所述y轴滑块直线模组中两条直线导轨分别安装在机械手行架两根长梁内侧。
8、作为本发明的一种优选技术方案,所述y轴齿轮齿条组中齿条安装在直线导轨中间,且齿轮通过滑台与齿条啮合,齿轮与减速电机传动轴连接,所述减速电机驱动传动轴,带动齿轮与滑块沿y轴移动。
9、作为本发明的一种优选技术方案,所述z轴气动驱动机构包括第一气缸、竖梁、第一滑块直线模组,所述第一气缸安装在滑台上,所述第一气缸推杆末端铰接在安装板上,所述第一气缸缸体末端连接竖梁,所述第一滑块直线模组中滑块安装在第一气缸的支架上,且滑轨安装在数量对应面,气动驱动第一气缸推杆反向作用于缸体,配合第一滑块直线模组,带动竖梁上下移动。
10、作为本发明的一种优选技术方案,所述x轴接近开关限位结构包括接近开关、接近开关支架、接近开关感应块组成,接近开关与支架固定在机械手行架长梁上,接近开关感应块固定在x轴端侧。
11、作为本发明的一种优选技术方案,所述x轴防撞缓冲结构包括防撞缓冲支架、防撞块组成。
12、与现有技术对比,本发明具备以下有益效果:
13、1、该一种桁架机械手,通过可变距吸盘机构,输送线来料前,两侧第一气缸伸缩杆伸出状态,此时输送线来料后,第一气缸伸缩杆向下运动,压紧袋装物料后,通过下方的真空吸盘吸住袋装物料,在对不同尺寸物料袋抓取时,通过控制吸盘支架上两侧第二气缸伸缩,调整真空吸盘位置,可以提高不同尺寸袋装物料的兼容性,满足大规模生产需求,由此达到了对不同尺寸物料抓取的目的,提高了袋装物料的生产效率;
14、2、该一种桁架机械手,通过x轴防撞缓冲结构,装置运行时,为避免x轴电机驱动机构在机械手行架内部x轴移动时横梁与机械手行架发生碰撞,通过x轴防撞缓冲结构包括的防撞缓冲支架、防撞块与横梁接触,可对x轴电机驱动机构进行缓冲,提高了装置的安全性和使用寿命;
15、3、该一种桁架机械手,通过机械手行架内部两侧设置的机械手结构,两个可变距吸盘机构同时工作,能大大提高袋装物料搬运效率。
技术特征:
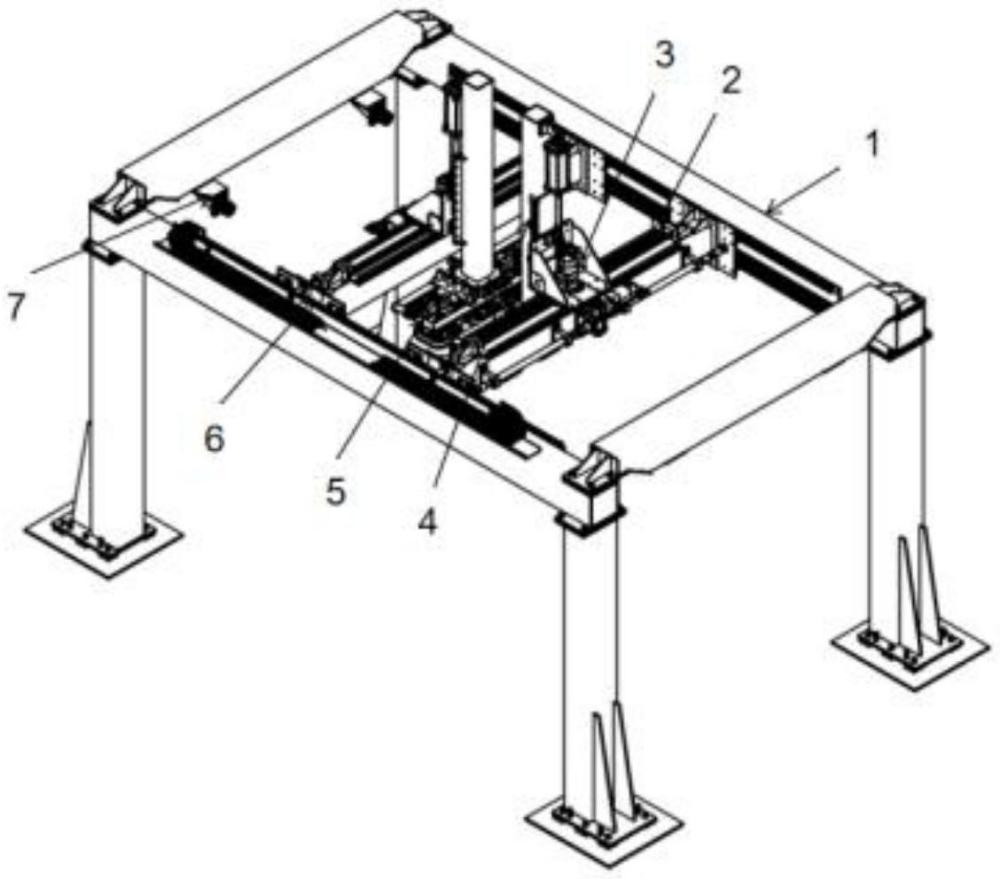
1.一种桁架机械手,安装于机械手行架(1),其特征在于:所述机械手行架(1)的内部两侧设置有x轴电机驱动机构(2),两个所述x轴电机驱动机构(2)的顶部设置有y轴电机驱动机构(3),两个所述y轴电机驱动机构(3)的一侧设置有z轴气动驱动机构(4),两个所述z轴气动驱动机构(4)的底部设置有可变距吸盘机构(5),所述机械手行架(1)的顶部两侧设置有x轴接近开关限位结构(6),所述机械手行架(1)的内部设置有四个x轴防撞缓冲结构(7);
2.根据权利要求1所述的一种桁架机械手,其特征在于:所述x轴电机驱动机构(2)包括中置减速电机(2.1)、传动杆(2.2)、横梁(2.3)、万向节(2.4)、滑块安装板(2.5)、x轴滑块直线模组(2.7),所述x轴滑块直线模组(2.7)中两条直线导轨分别安装在机械手行架(1)两根长梁内侧。
3.根据权利要求2所述的一种桁架机械手,其特征在于:所述x轴齿轮齿条组(2.6)中齿条安装在直线导轨中间,且齿轮通过滑块安装板(2.5)与齿条啮合。
4.根据权利要求2所述的一种桁架机械手,其特征在于:所述传动杆(2.2)两端与所述万向节(2.4)连接,所述万向节(2.4)另一端连接齿轮轴。
5.根据权利要求2所述的一种桁架机械手,其特征在于:所述传动轴穿过中置减速电机(2.1),所述中置减速电机(2.1)安装在横梁(2.3)上,所述中置减速电机(2.1)驱动传动轴,且传动轴带动万向节(2.4)与齿轮,齿轮啮合齿条移动,带动滑块移动。
6.根据权利要求1所述的一种桁架机械手,其特征在于:所述y轴电机驱动机构(3)包括滑台(3.1)、减速电机(3.2)、y轴齿轮齿条组(3.3)、y轴滑块直线模组(3.4),所述y轴滑块直线模组(3.4)中两条直线导轨分别安装在机械手行架(1)两根长梁内侧。
7.根据权利要求6所述的一种桁架机械手,其特征在于:所述y轴齿轮齿条组(3.3)中齿条安装在直线导轨中间,且齿轮通过滑台与齿条啮合,齿轮与减速电机(3.2)传动轴连接,所述减速电机(3.2)驱动传动轴,带动齿轮与滑块沿y轴移动。
8.根据权利要求1所述的一种桁架机械手,其特征在于:所述z轴气动驱动机构(4)包括第一气缸(4.1)、竖梁(4.2)、第一滑块直线模组(4.3),所述第一气缸(4.1)安装在滑台(3.1)上,所述第一气缸(4.1)推杆末端铰接在安装板上,所述第一气缸(4.1)缸体末端连接竖梁(4.2),所述第一滑块直线模组(4.3)中滑块安装在第一气缸(4.1)的支架上,且滑轨安装在数量对应面,气动驱动第一气缸(4.1)推杆反向作用于缸体,配合第一滑块直线模组(4.3),带动竖梁(4.2)上下移动。
9.根据权利要求1所述的一种桁架机械手,其特征在于:所述x轴接近开关限位结构(6)包括接近开关、接近开关支架、接近开关感应块组成,接近开关与支架固定在机械手行架(1)长梁上,接近开关感应块固定在x轴端侧。
10.根据权利要求1所述的一种桁架机械手,其特征在于:所述x轴防撞缓冲结构(7)包括防撞缓冲支架、防撞块组成。
技术总结
一种桁架机械手,属于袋装物料生产技术领域,安装于机械手行架,所述机械手行架的内部两侧设置有X轴电机驱动机构,两个所述X轴电机驱动机构的顶部设置有Y轴电机驱动机构,两个所述Y轴电机驱动机构的一侧设置有Z轴气动驱动机构,两个所述Z轴气动驱动机构的底部设置有可变距吸盘机构;通过可变距吸盘机构,两侧第一气缸伸缩杆伸出状态,此时输送线来料后,第一气缸伸缩杆向下运动,压紧袋装物料,通过下方的真空吸盘吸住袋装物料,在对不同尺寸物料袋抓取时,通过控制吸盘支架上两侧第二气缸伸缩,调整真空吸盘位置,可以提高不同尺寸袋装物料的兼容性,满足大规模生产需求,由此达到了对不同尺寸物料抓取的目的,提高了袋装物料的生产效率。
技术研发人员:沈启明,曹绕,吴金强,沈银鹏,王盛盛,李艳军,冯沉冲
受保护的技术使用者:安徽海螺中南智能机器人有限责任公司
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!